1. Semantic Segmentation
1.1 What is semantic Segmentation?
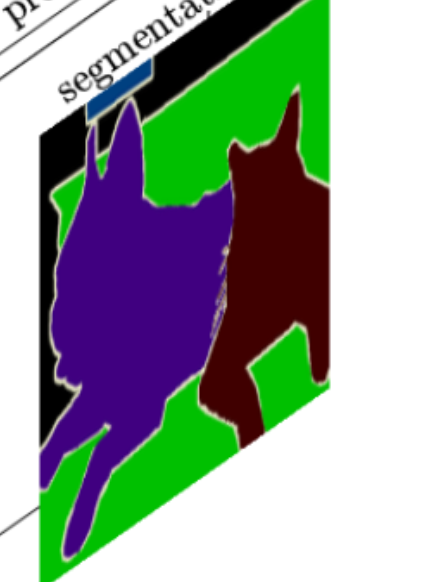
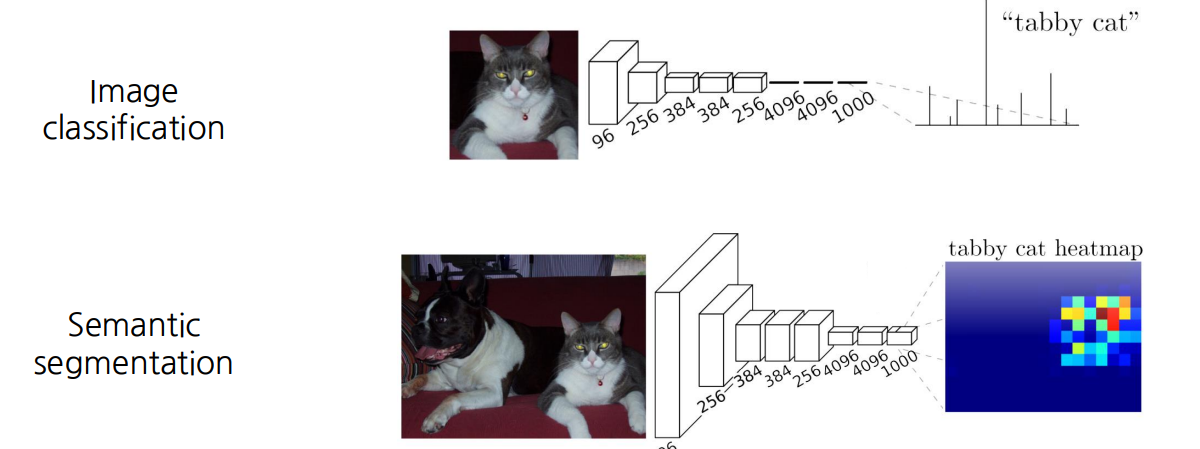
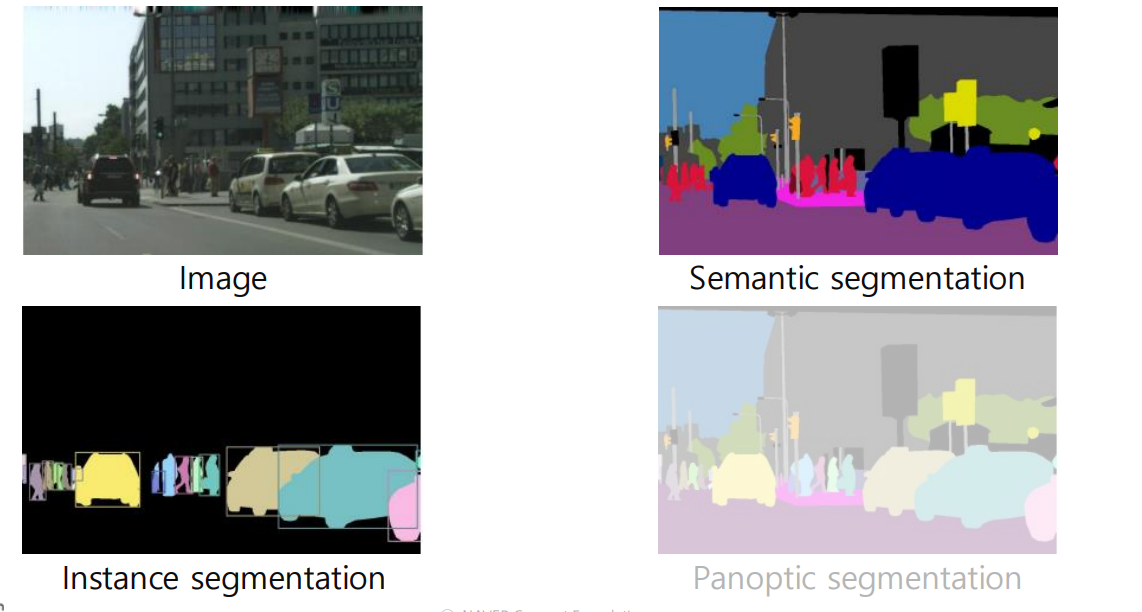
📖 Semantic Segmentationis a deep learning algorithm that associates a label or category with every pixel in an image. 즉, 위의 이미지처럼 모든 픽셀에다가 라벨붙임.
1.2 Where can semantic segmentation be applied to?
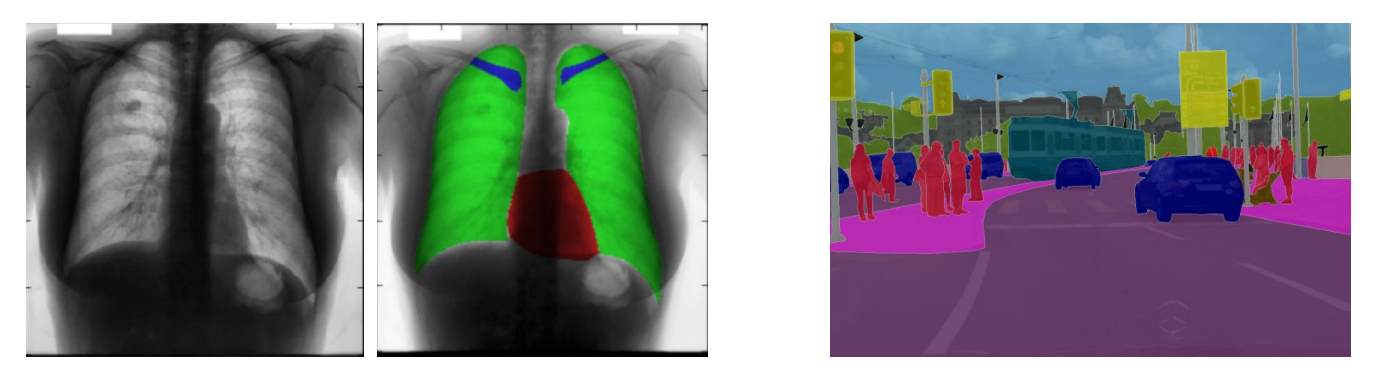
📖 영상의료나 자율주행차량에다 사용할 수 있음.
2.Semantic segmentation architectures
2.1 FCN(Fully Convolutional Networks
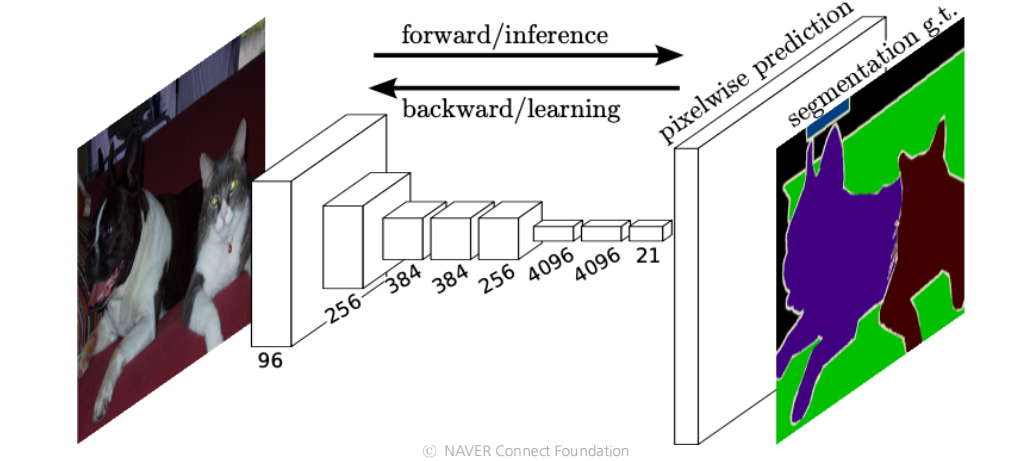
- 처음으로 end-to-end 형식의 semantic segmentation 임.
- output 에 아무형식의 사이즈(arbitrary size)넣고 output에 input size 에 대응되는(corresponding_) 사이즈 segmentation map출력
- Fully connected layer: fixed dimensinal vector and discard spatial coordinates
- Fully convolutional layer: output a classification map which has spatial coordinates
📖 Fully Convolutional Network의 문제점은 , 예측된 스코어 맵은(predicted score map)은 매우 낮은 해상도를(in a very low resolution)을 가진다는 점이다.
🤔 왜 낮은 해상도를 가질까?
✍️ 넓은 수용범위를 가지면(For having a large receptive field) 여러개의 공간풀링 레이어가 있기 떄문이다.
즉, 평균풀링이나 맥스풀링을 반복하면 당연히 차원이 낮아지고 이로 인해 low resolution을 가질 수 밖에 없다.
👉 Solution: Enlarge the Score map by upsampling!
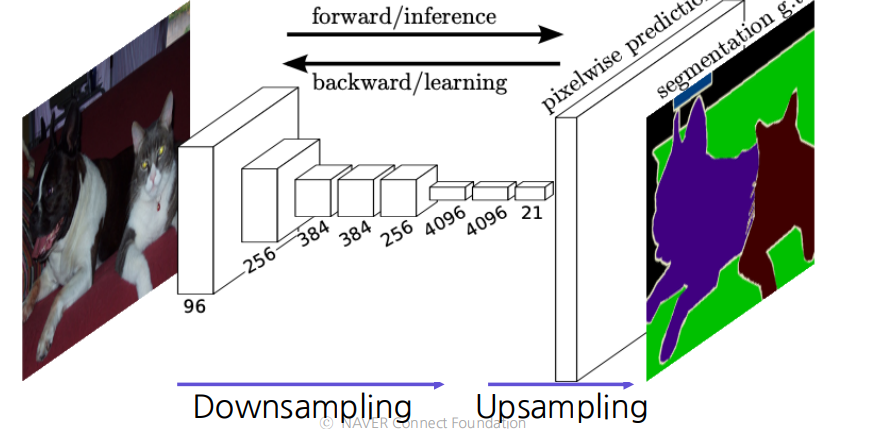
📖 Upsampling!은 small activation map을 input image 에 맞게 resize 함
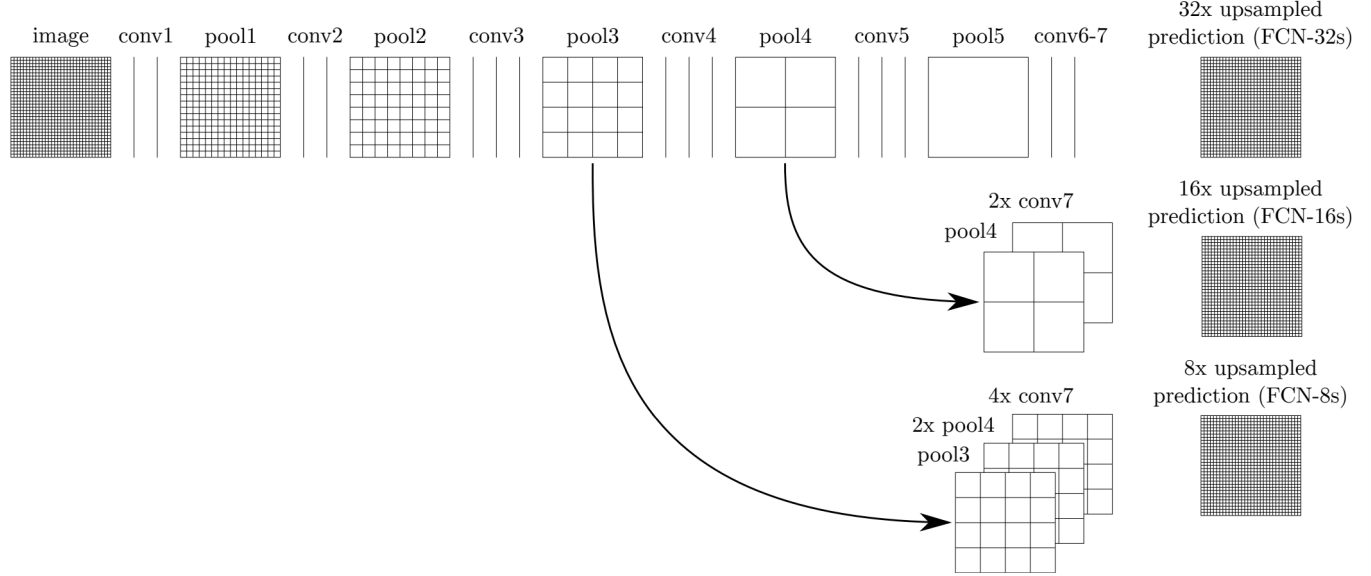
📖 위에 보이는 것처럼 skip connection을 통해 score map을 확장(enlarge)시킴!
2.2 U-Net
:https://arxiv.org/abs/1505.04597
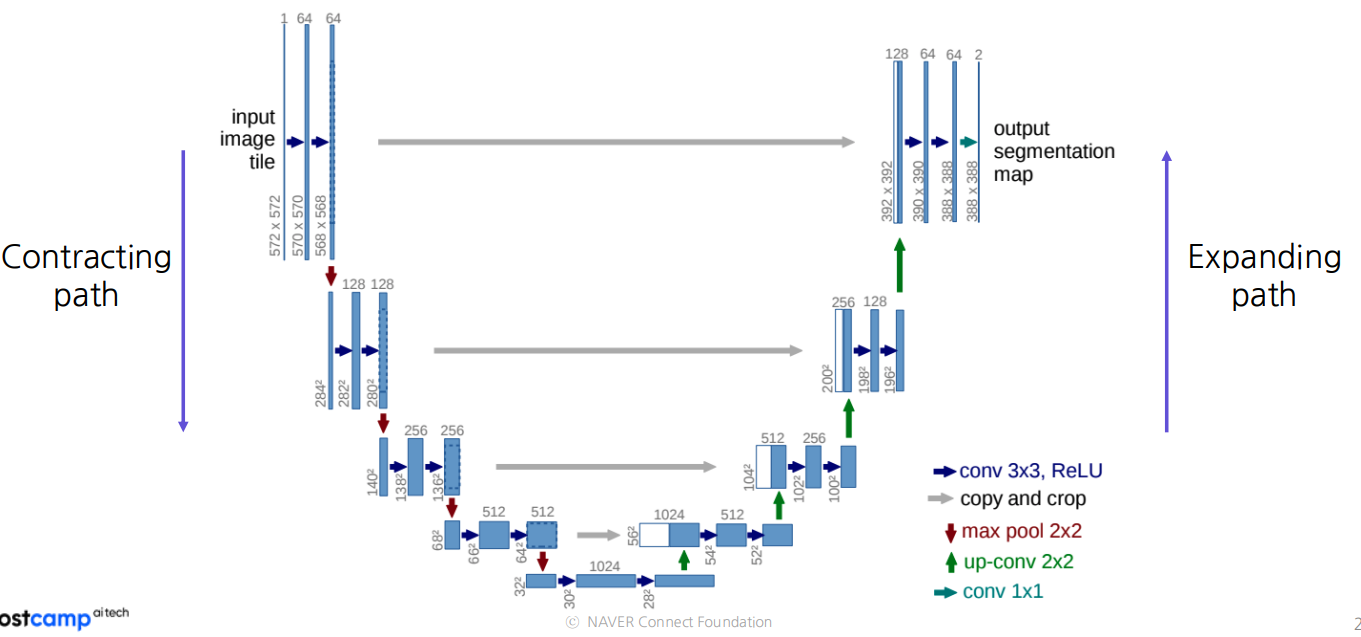
왼쪽의 Contracting Path
- 3 x 3 convolution을 반복적으로 적용
- feature channels을 2배로 함 (doubling)
- holistc context(전체적인 상황이나 관계를 고려하여 정보 이해) 를 파악할려고 사용
오른쪽의 Expanding Path
- 2 x 2 convolutional 을 반복적으로 적용함.
- feature channel수를 반으로 계속 줄임
- 왼쪽의 Contracting Path 로부터 corresponding feature map을 concatenate 함.-> 이는 지역적 정보를 주기 위함임(provide localized information)
3. Object detection
3.1 What is object detection?
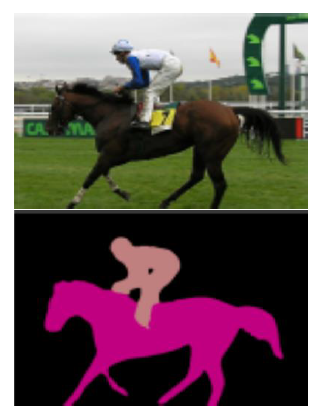
객체탐지란, 디지털 이미지와 비디오로 특정한 계열의 시맨틱 객체 인스턴스를 감지하는 일
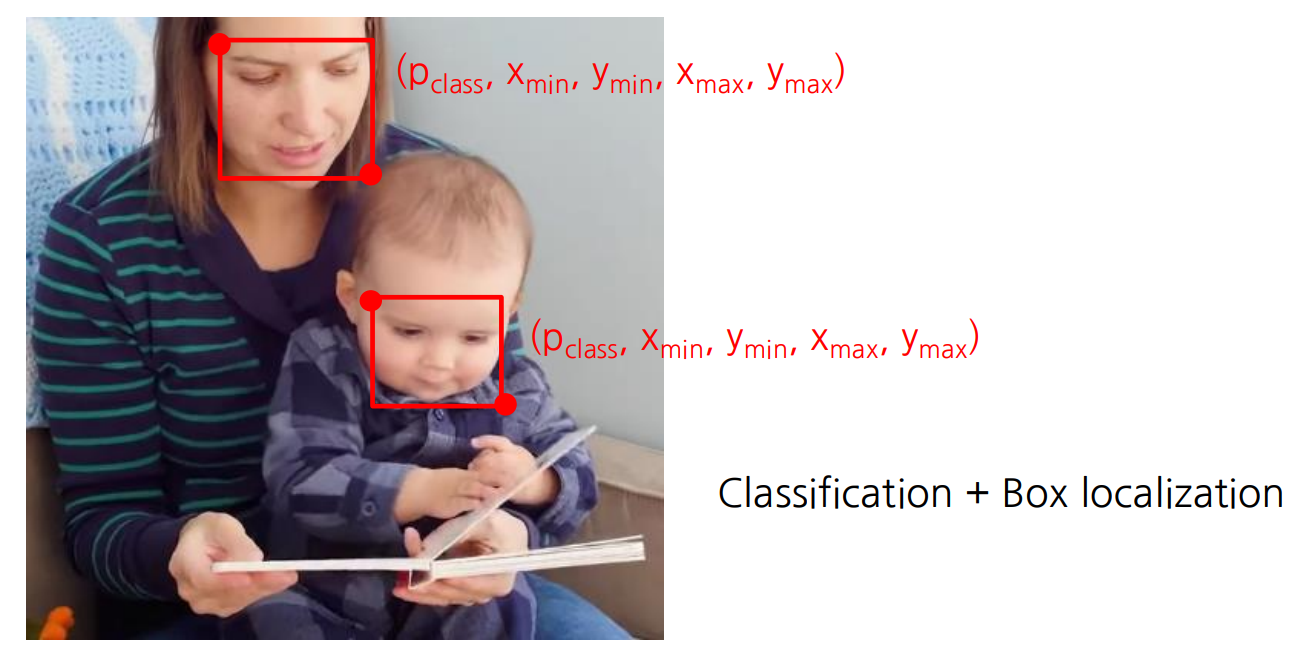
위의 예제에서 보이는 것처럼 Classification 하고 어디인지 Box localization 함.
3.2 What are the applications of object detection?
Antonomous Driving , OCR(Optical Character Recongnition)등등
4. Object detection architectures
4.1 Two-stage detector: R-CNN(Region-CNN)
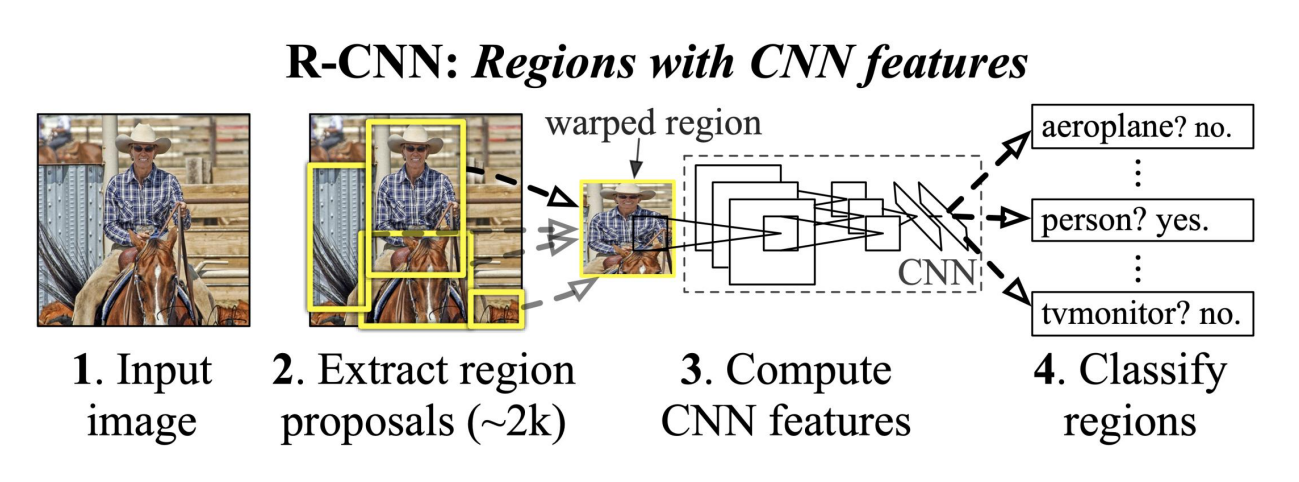
📖 순서는 이렇다
① Input Image 를 넣는다.
② Region Proposal 를 2,000 개 정도 뽑는다
③ CNN features 를 엄청나게 계산한다.
④ Classify 함.
R-CNN family

4.2 One-stage detector: YOLO(You Only Look Once)
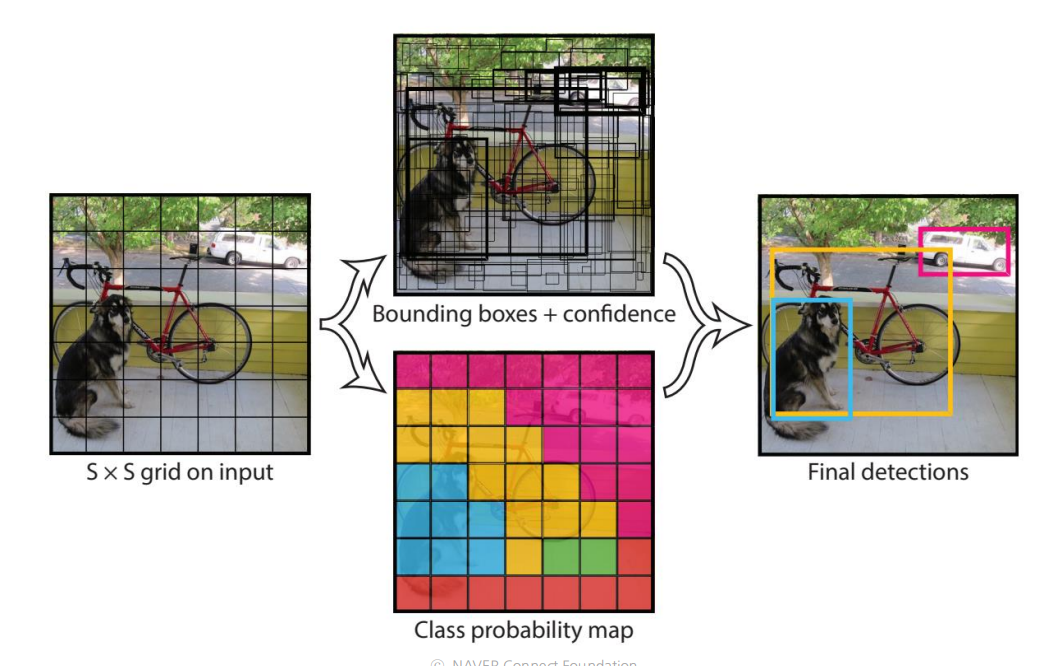
📖 지역을 추출하고 -> classifiy 하는 R-CNN과는 다르게, YOLO 는 탐지와 동시에 분류한다.
YOLO Acrhitecture
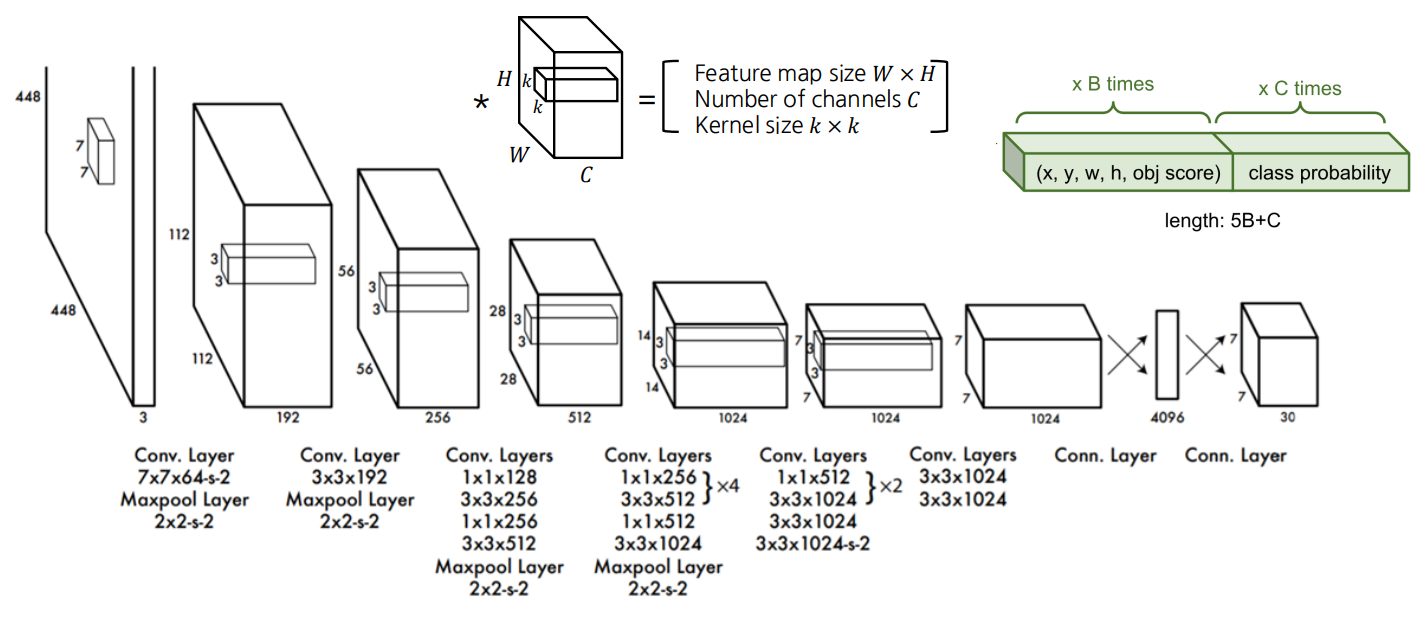
- 24 개의 convolutional layer ,4개의 max-pooling layer , 2개의 FC
- Resize input image into 448 x 448 before going convolutional layer
- 1 x 1 convolutional lyaer 가 채널의 수를 줄이기 위해 처음에 적용되고 그후에 직사각형 output 을 만들어내기위해 3 x 3 convolutional layer 를 사용함
- 정규화를 위해 batch normalization, dropout,등을 사용함.
4.3 One-stage detector vs. Two-stage detector
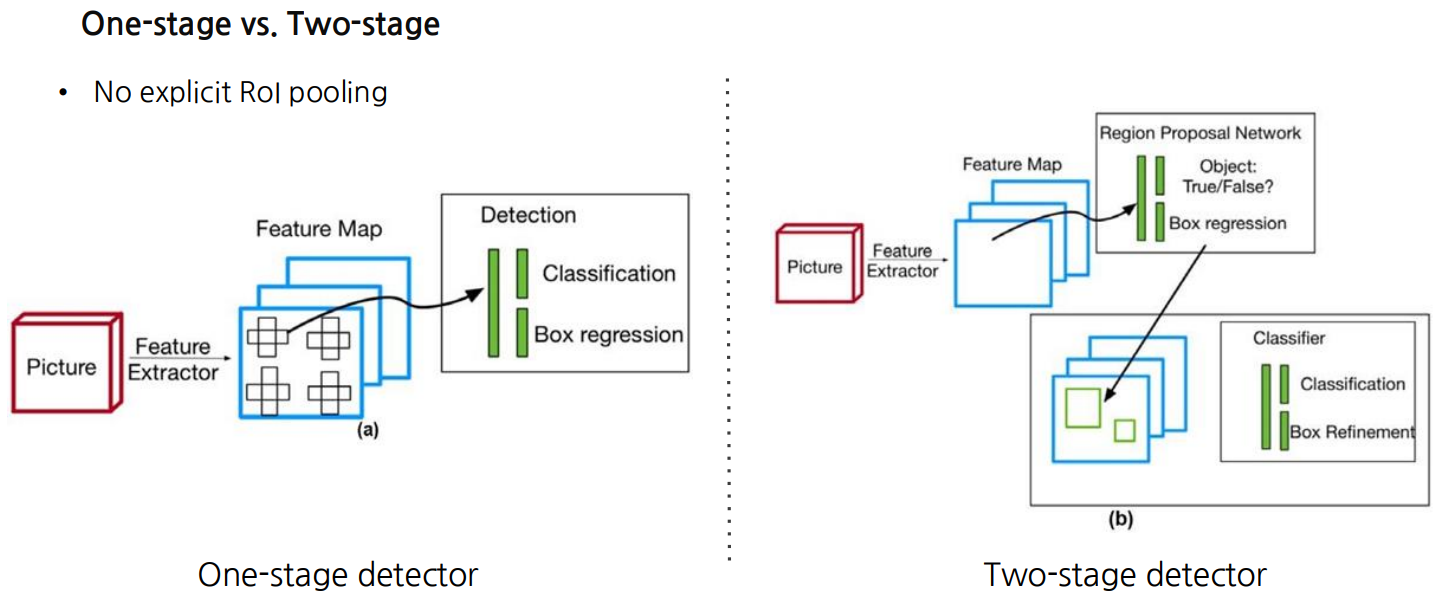
one-stage는 classificatino 과 box regression이 동시에(YOLO),
two-stage는 classification 과 box regression 이 각각.(R-CNN)
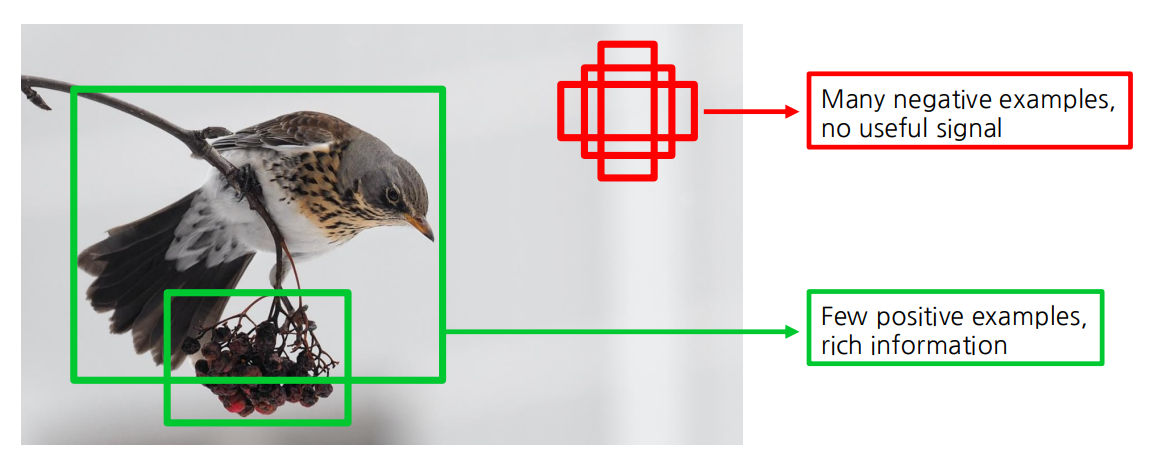
One-stage(YOLO 모형)은 긍정적인 앵커박스(객체있는거)와 부정적인 앵커박스(배경)간의 불균형이 심하기 때문에 클래스 불균형(class imbalance)가 발생한다.
이를 해결하기 위해 새로운 손실함수 Focal loss를 제안한다.
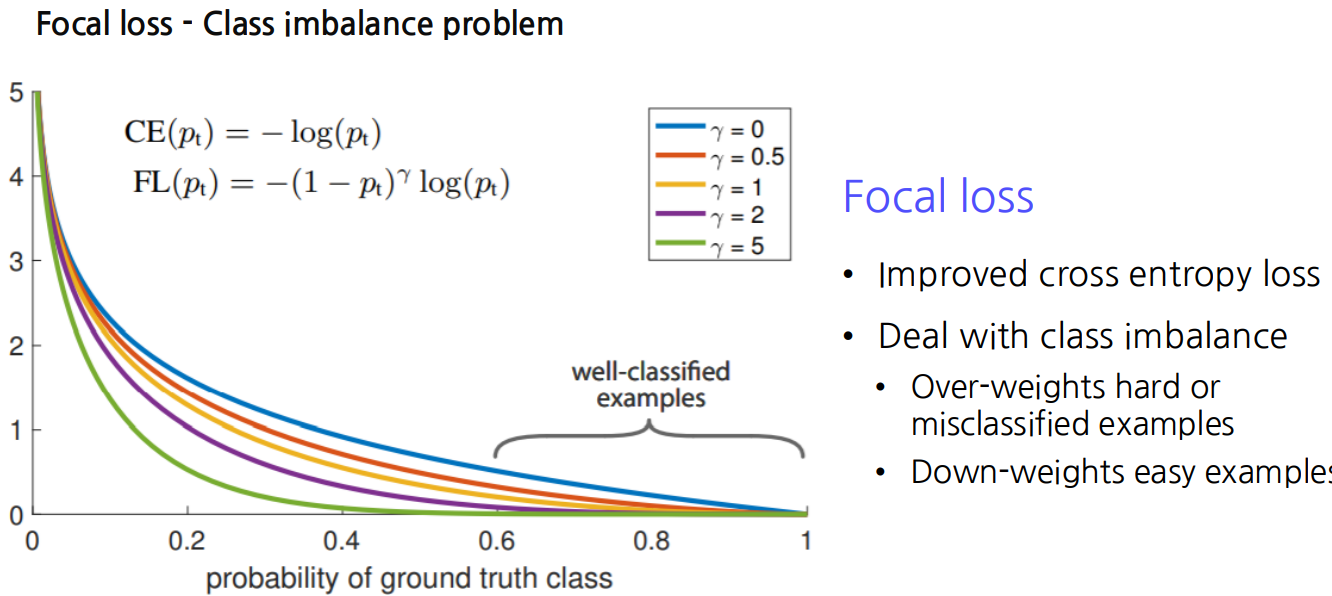
Focal loss란?
식 해석:
① : 정답 클래스에 대한 모델의 예측 확률
② : 클래스의 균형을 맞추기 위한 파라미터 -> 클래스 불균형을 조정하는데 사용
③ : "초점"파라미터로, 모델이 어려운 샘플에 더 집중하도록 도움.주요특징
① Easy Examples의 손실 감소:
-> 항이 쉬운 샘플의 손실 기여를 줄임. 즉, 이미 틀린거 에 모델이 더 집중하게끔함.
② Hard Examples의 손실 증가:
-> 항이 잘 분류한거에 마이너스를 주어서 더 틀린거에 집중하게끔함.
③ 클래스 불균형 처리
-> 를 사용하여 클래스의 비율에 따라 손실을 조정할 수 있어, 클래스 불균형 문제를 완화할 수 있다.
위 Class Imbalance 문제를 Focal loss 로 푼게
RetinaNet
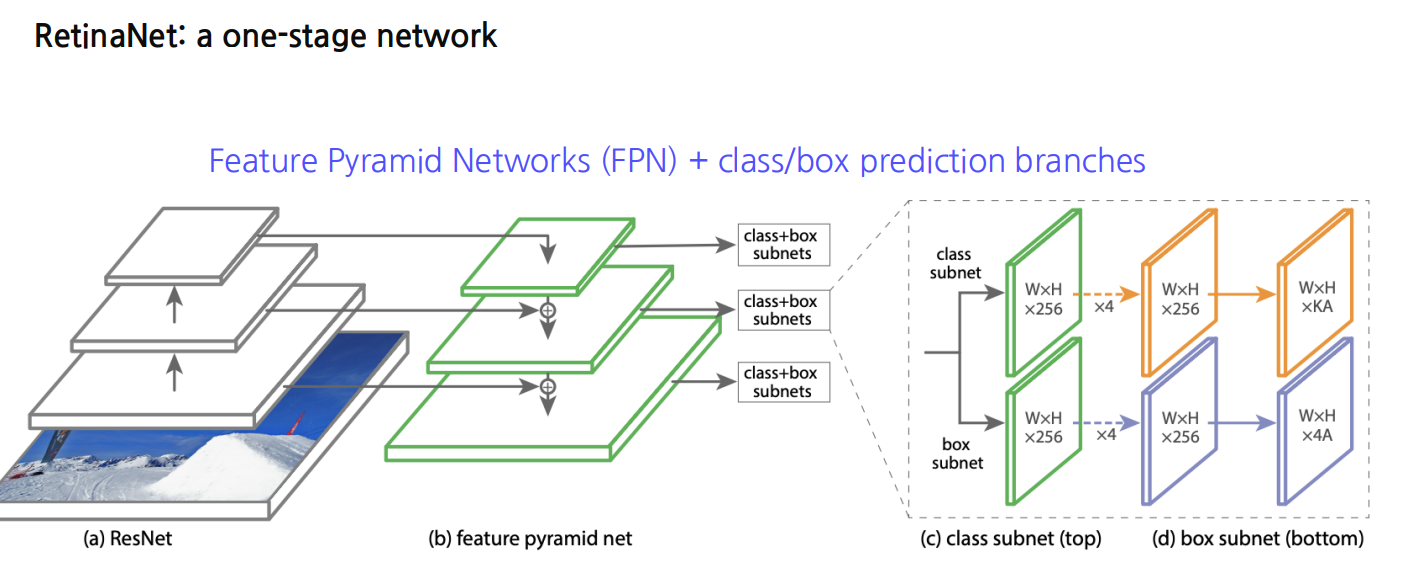
-> 논문참조.
5. Instance segmentation
5.1 Instance segmentation
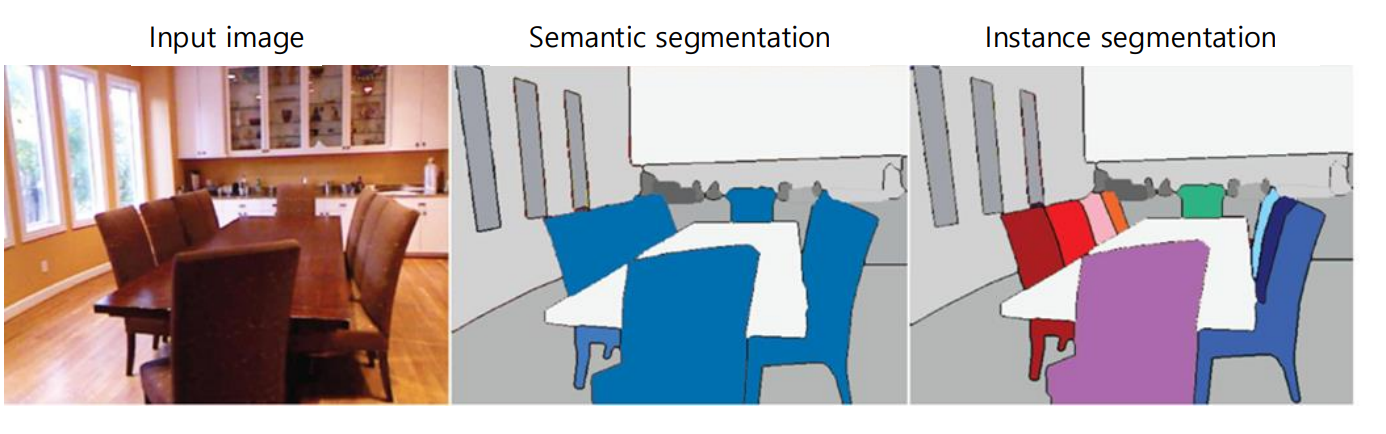
Instance Segmentation = Semantic Segmentation + distinguishing instances
📖 즉, instance segmentation은, 이미지 내의 각 개체를 개별적으로 구분하고 분할하는 고급이미지 처리 기술이다.
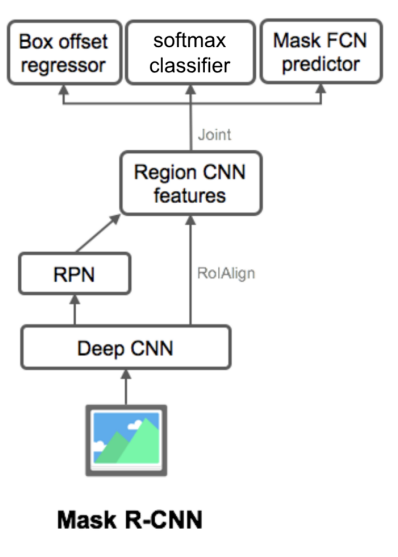
ex) Mask R-CNN, Mesh R-CNN, DensePose R-CNN등이 있다.
Mask R-CNN
6. Transformer-based methods
6.1 Extending transformers to computer vision
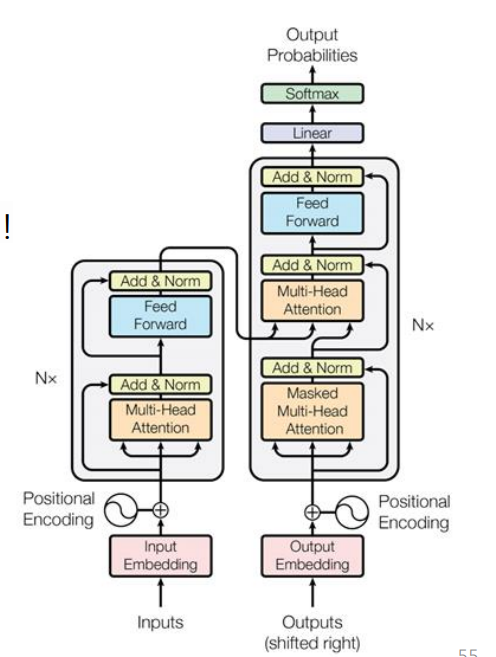
📖 Transformer 는 Attention 만 있는 구조로 이로 인해 NLP 에서 크게 성공을 거두었는데 이를 Computer Vision 에도 쓰자는게 핵심이다.
6.2 DETR(DEtection TRansformer)
DETR : End-to-End Object Detection with Transformers
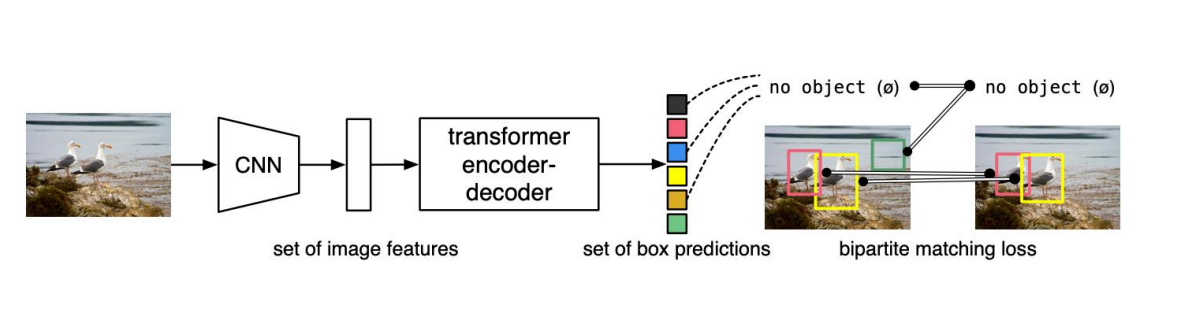
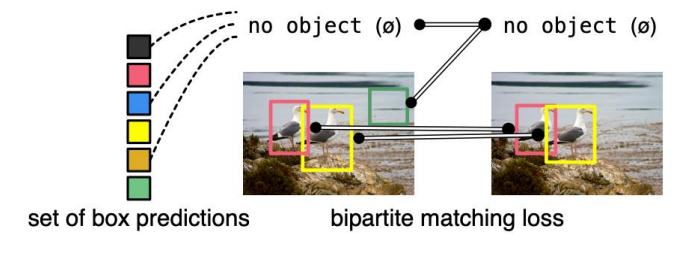
DETR directly predicts (in parallel) the final set of detections by combining a common CNN with a transformer architecture. During training, bipartite matching uniquely assigns predictions with ground truth boxes. Prediction with no match should yield a "no object" class prediction
📖DETR 특징
- Object Detection 을 직접 집합 예측 문제(direc set prediction problem)로 간주한다.
- 많은 hand-designed components를 제거했음
🤔 직접 집합 예측 문제(direct set prediction problem)이 뭐야??
👉 직접 집합 예측 문제란, 모델이 입력 데이터에서 객체들을 직접적으로 집합 형태로 예측하는 문제를 의미함. 즉, 모델이 이미지 내의 모든 객체를 한 번에 모두 찾아내고 그객체들의 위치와 종류를 동시에 예측함. -> 중간단계가 사라짐.

DETR 방법론
[1]
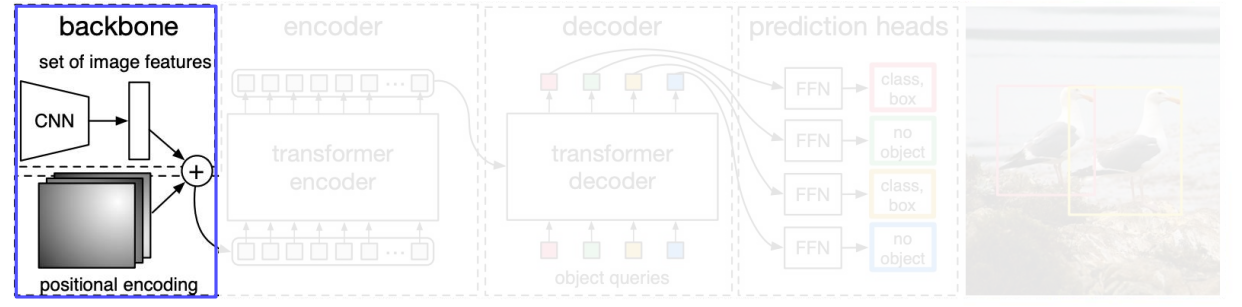
- Backbone 은 전통적인 CNNs 임
- 컴팩트한 특징표현들을 추출해냄
- Positional encoding을 transformer encoder에 지나기전에 더해줌
[2]
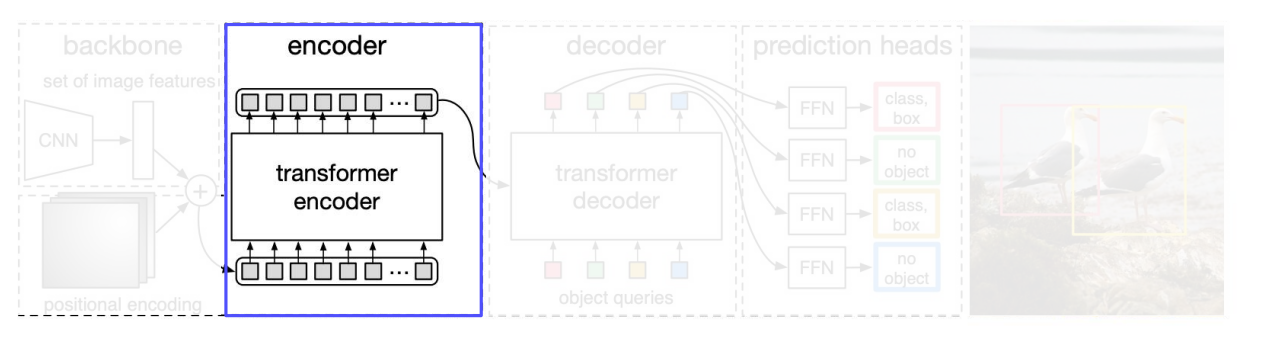
Transformer encoder
- 1 x 1 convolution 을 쓰면서, 새로운 피처 맵을 만든다. -> 더 작은 차원 로
- feature map 은 로 reshape함
- Fixted positional encoding을 추가함. 왜냐하면 self-attention은 permutation - invariant 하기 떄문이다. (permutation invariants란, 입력벡터 요소의 순서와 상관없이 같은 출력을 생성한다는 뜻)
[3]
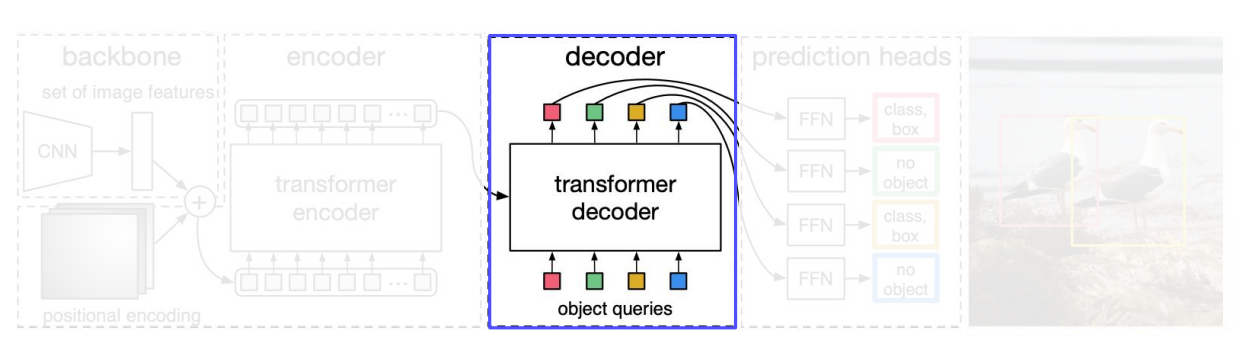
Transformer Decoder
- input -> (1) encoder outputs + (2) object queries(Learnt Positional Encoding)
Object queries : 객체 쿼리. 이 객체쿼리는 사전에 정의된 것이 아니라, 학습가능한 위치 인코딩을 포함함.- 각각 decoder layer 에 병렬적으로 N objects 가 decodes 함.
[4]
Prediction Heads
- 개의 bounding boxes 를 예측함 (당연히 실제 objects갯수)
- 그럼 이 남는게 있으니까 남는거는 label 를 써서 No object 라는 것으로 명시함.(이는 background class 와 비슷)
[5] 여기는 수식을 꼼꼼히 살펴보자.
Bipartite matching(이분 매칭)
- : Ground truth sef of objects(실제 객체의 집합)
- : set of N predictions(모델이 예측한 N개의 바운딩 박스)
- : pairwise matching cost(매칭 비용을 측정하는 함수)
- : matching permutation of elements(N개의 예측 바운딩 박스와 N개의 실제 객체간의 매칭순서를 나타내는 순열,은 N개의 원소로 구성된 모든 가능한 순열의 집합. )
①
②
③
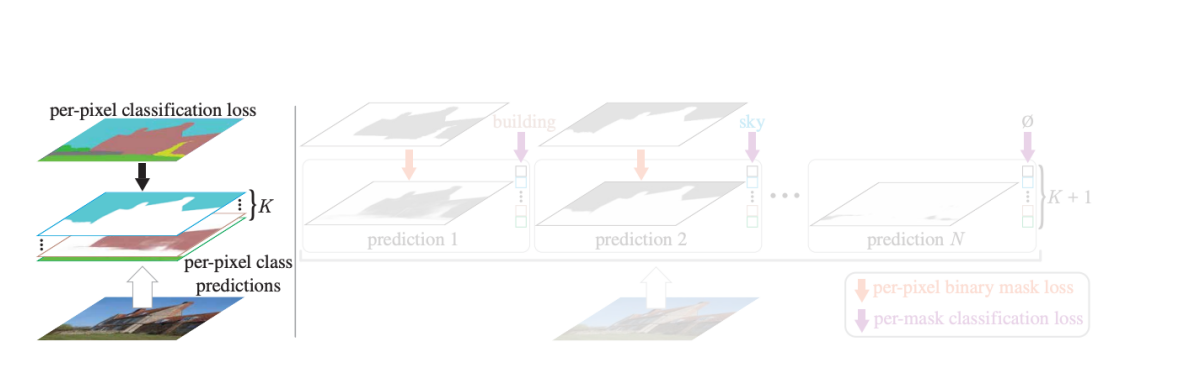
6.3 MaskFormer
MaskFormer: Per-Pixel Classification is Not All You Need for Semantic Segmentation
6.4 Uni-DVPS(Unified Model for Depth-Aware Video Panoptic Segmentation)
7. Segmentation foundation model
7.1 SAM(Segment Anything Mode)
7.2 Grounded-SAM(Grounding DINO + SAM)
