퍼셉트론
: 인공신경망
- 기계학습 역사에서 가장 오래된 기계 학습 모델
- 퍼셉트론(인공두뇌학) → 다층 퍼셉트론(결합설) → 깊은 인공신경망(심층학습)
신경망 기초
인공신경망과 생물 신경망
(예시) 사람의 뉴런
두뇌의 가장 작은 정보처리 단위
- 구조
- 세포체 - 간단한 연산
- 수상돌기 - 신호 수신
- 축삭 - 처리 결과를 전송
👉 뉴런을 모방한 것이 바로 "인공신경망(퍼셉트론)"
-
뉴런의 동작 이해를 모방한 초기 인공신경망 (artificial neural networks(ANN)) 연구 시작 → 퍼셉트론
-
사람의 신경망 → 인공 신경망
- 세포체 → 노드
- 수상돌기 → 입력
- 축삭 → 출력
- 시냅스 → 가중치
신경망 종류
-
전방(forward) 신경망, 순환(recurrent) 신경망
-
얕은(shallow) 신경망, 깊은(deep) 신경망
-
결정론(deterministic) 신경망
- 모델의 매개변수와 조건에 의해 출력이 완전히 결정되는 신경망
-
확률론적(stochastic) 신경망
- 고유의 임의성을 가지고 매개변수와 조건이 같더라도 다른 출력을 가지는 신경망
💡 신경망의 구조에 따라 다양한 형태의 신경망이 존재
퍼셉트론
- 원시적 신경망으로써 깊은 인공신경망을 포함한 현대 인공신경망의 토대
- 깊은 인공신경망은 퍼셉트론의 병렬 배치를 순차적 구조로 결합한 형태
- 구조
- 절(node)
- 가중치(weight)
- 층(layer)
퍼셉트론 구조
- 입력
- 번째 노드는 특정 벡터 의 요소 를 담당
- 항상 1이 입력되는 편향 노드 포함
- 입력과 출력 사이의 연산
- 번째 입력 노드와 출력 노드를 연결하는 변은 가중치 를 가짐 (퍼셉트론은 단일 층 구조 라고 간주)
- 출력
- 번째 노드에 의해 수치(+1 or -1) 출력
퍼셉트론 동작
-
선형 연산 → 비선형 연산
- 선형 연산 : 입력(특징)값과 가중치를 곱하고 모두 더해 를 구함
- 비선형 연산 : 활성함수 를 적용
- 활성함수로 계단 함수 사용 (출력 y=1 or y=-1)
-
행렬 표기
- (편향 항 을 벡터에 추가)
- 퍼셉트론의 동작은
-
결정 직선
- 과 는 직선의 기울기, 은 절편(편향)을 결정
- 여기서 결정 직선은 특징 공간을 (예)+1,-1 의 두 부분공간으로 이분할하는 분류기 역할
-
차원 공간으로 일반화
- 2차원: 결정 직선
- 3차원: 결정 평면
- 4차원 이상: 결정 초평면
학습
-
가중치 값은 어떤 값을 가져야 할지?
-
일반적인 분류기의 학습 과정
- 과업 정의, 분류 과정의 수학적 정의(가설 설정)
- 해당 분류기의 목적함수 정의
- 를 최소화하는 를 찾기 위한 최적화 수행
-
단계: 목적함수 정의 (가설 - 퍼셉트론)
- 매개변수 집합 :
- 목적함수 :
- ⭐ 퍼셉트론 목적함수의 상세 조건
- 모든 샘플을 맞히면
- 틀리는 샘플이 많은 일수록 는 큰 값을 가짐
-
단계: 목적함수 상세 설계
- (는 틀리는 샘플의 집합)
- 위의 식은 퍼셉트론 목적함수의 상세 조건을 만족하므로 퍼센트론의 목적함수로 적합!
- 는 항상 양수를 가짐 👉 만족
- 임의의 샘플 가 에 속한다면,
퍼셉트론의 예측값 와 실제값 의 부호는 다름 → (+1, -1 or -1,+1)
- 임의의 샘플 가 에 속한다면,
- 가 클수록 (틀린 샘플이 많을수록)
는 큰 값을 가짐 👉 만족 - 가 공집합일 때 (모든 샘플을 맞출 때)
👉 만족
- 는 항상 양수를 가짐 👉 만족
-
단계: ⭐ 경사 하강법 (gradient descent)
- 목적함수 의 기울기를 이용하여 최소값을 가지는 극값을 찾음
- 경사도 계산
- 일반화된 가중치 갱신 규칙 를 적용
(경사도 (gradient) 필요) - 편미분을 이용
- 일반화된 가중치 갱신 규칙 를 적용
- 델타규칙(delta rule)
- 학습률(learning rate) 에 따라 반복 탐색
💡 학습률을 너무 작게 또는 너무 크지 않게 적절하게 지정해주는 것이 중요하다 (너무 크거나 작으면 반복 횟수가 많아짐)
-
퍼셉트론 학습 알고리즘 (완벽하게 양분화 된다고 가정)
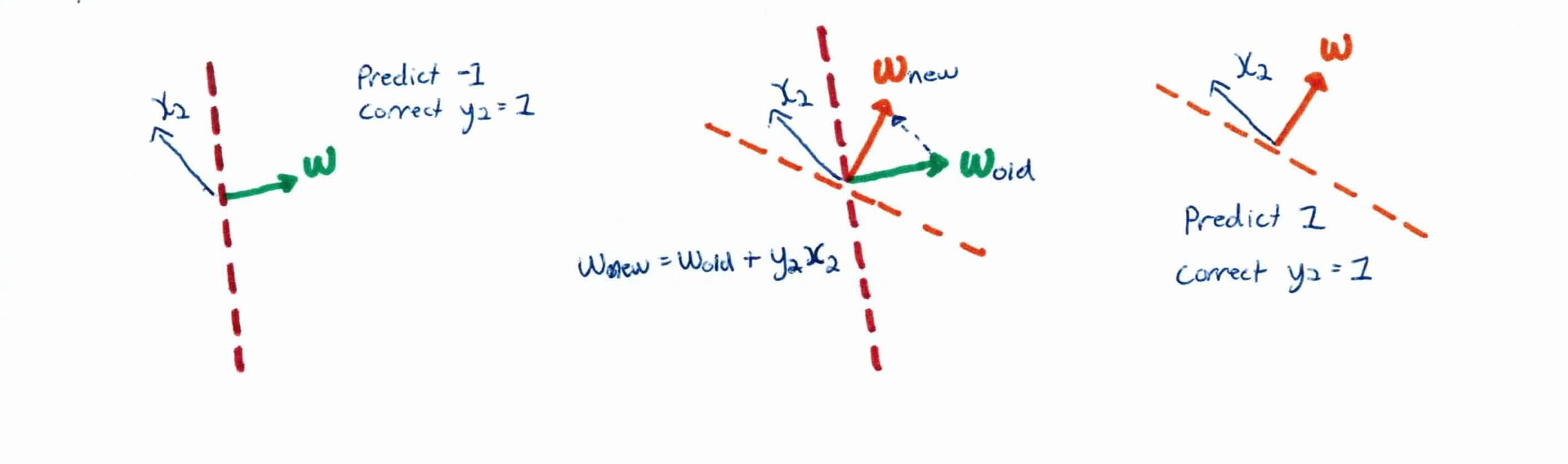
출처: https://kseow.com/perceptron.html
- 확률론적(stochastic) 형태
- 샘플 순서를 섞고, 틀린 샘플이 발생하면 즉시 갱신
- 무리(batch) 형태
- 훈련집합의 샘플을 모두 맞출 때가지 세대(epoch)를 반복
- 확률론적(stochastic) 형태
💡 선형분리가 불가능한 경우
- 퍼셉트론 적용하지 않는 것이 일반적
- 다층 퍼셉트론을 이용

하나씩 정리하는 개발공부로그입니다.