- Kinematic Model : Force나 Torque를 고려하지 않는 모델 (운동 방정식 X)
Ⅰ. 좌표계
1. World Coordinate System
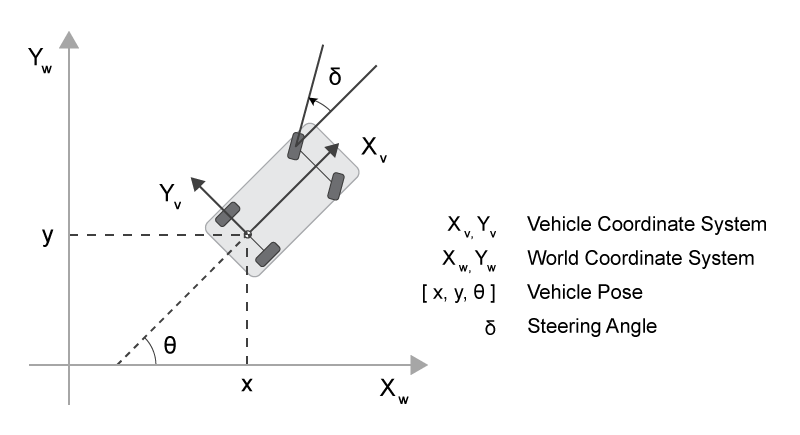
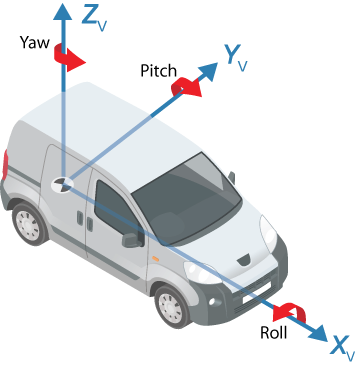
2. Vehicle coordinate system
Ⅱ.Kinematic bicycle model
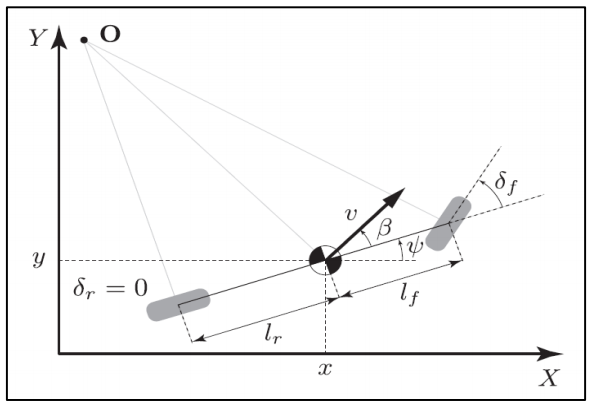
1. rear wheel reference point
Assumptions :
- No tire slip
- 0 steer angle at rear wheel
- 뒷바퀴와 앞바퀴 속도 벡터 XY 축 분해
- 직각삼각형에서
- (5), (6) 시간에 대하여 미분
- (7), (8) 에 (1)~(4) 대입
- (9), (10) 을 연립하여 V_F 소거하여 정리하면
- 삼각함수 공식에 의해
- 따라서 (1), (2), (11)를 rear wheel 에 대해 서술하면,
2. center of gravity reference point
- 비슷한 방식으로 유도 가능
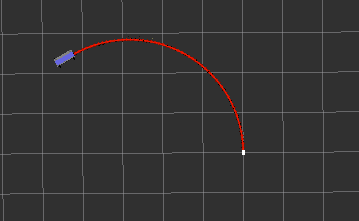
Ⅲ. 파이썬 코드 구현
class VehicleModel(object): L = 0.5 def __init__(self, x=0.0, y=0.0, yaw=0.0, v=0.0): self.x = x self.y = y self.yaw = yaw self.v = v self.max_steering = np.radians(30) def update(self, steer, a=0): steer = np.clip(steer, -self.max_steering, self.max_steering) self.x += self.v * np.cos(self.yaw) * dt self.y += self.v * np.sin(self.yaw) * dt self.yaw += self.v / self.L * np.tan(steer) * dt self.yaw = self.yaw % (2.0 * np.pi) self.v += a * dt