
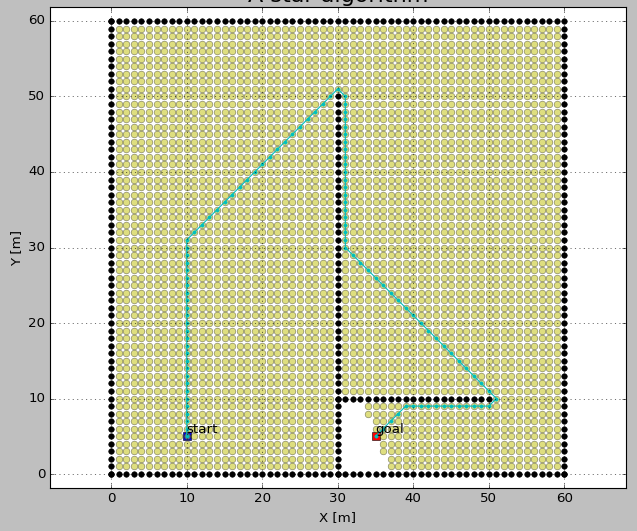
Ⅰ. Dijkstra Algorithm
1. Cost 설정
- cost = g(s) : 시작노드에서부터 노드 s 까지의 최소 cost
2. 알고리즘
- Open = {start_node}, Close= { }
- Open에서 cost가 가장 낮은 노드를 탐색하여 curr_node에 지정
- curr_node 가 goal_node와 같으면 종료
- curr_node 가 goal_node가 아니면
a. Open에서 curr_node 제거
b. Closed에 curr_node 추가
c. curr_node에서 갈 수 있는 neighbor 노드 검색
d. neighbor가 Closed에 있으면 다음 neighbor 검색
e. neighbor가 Open에 있으면 cost 업데이트f. neighbor가 Open에 없으면 Open에 추가 - 2~4 반복
2. 예시
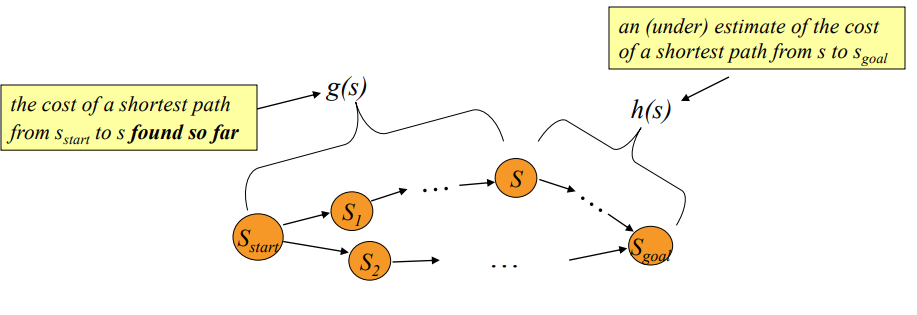
Ⅱ. A* Algorithm
1. cost 설정
- Dijkstra의 넓은 탐색범위를 좁혀주기 위해 cost함수로 g(s)+ w*h(s) 사용
- h(s) 는 보통 Euclidian distance로 사용
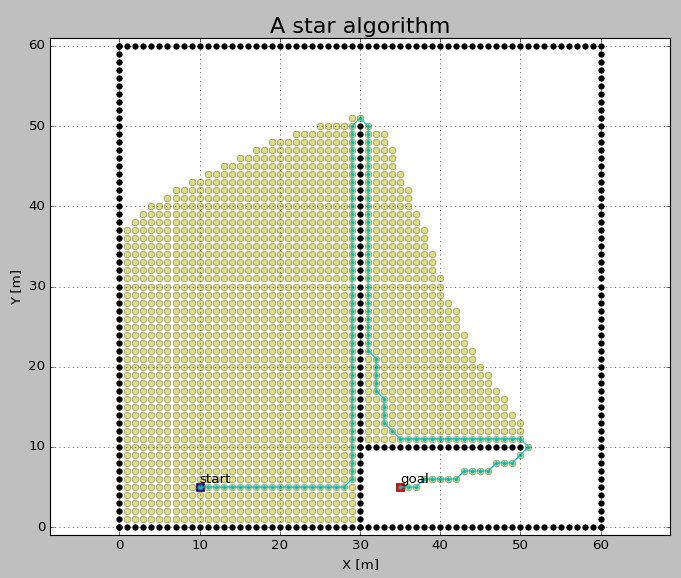
2. 예시
- Dijkstra의 탐색 범위보다 적어진 대신 경로 거리는 늘어난 것을 볼 수 있다
Ⅲ. Hybrid A* Algorithm
- A* 알고리즘의 discrete함을 보완한 알고리즘 -> continuous한 state로 expand
- 차량 주행 경로에 더 적절함
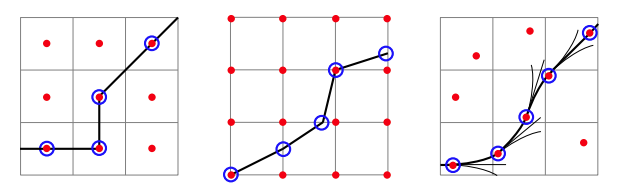
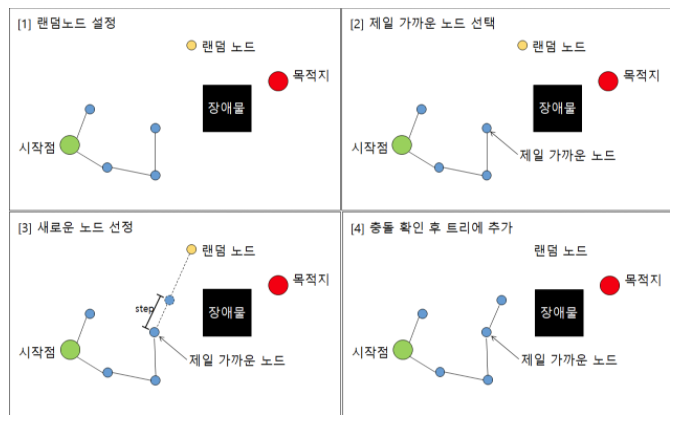
Ⅳ. RRT Algorithm
- Rapidly exploring Random Tree
1. 알고리즘
2. 예시
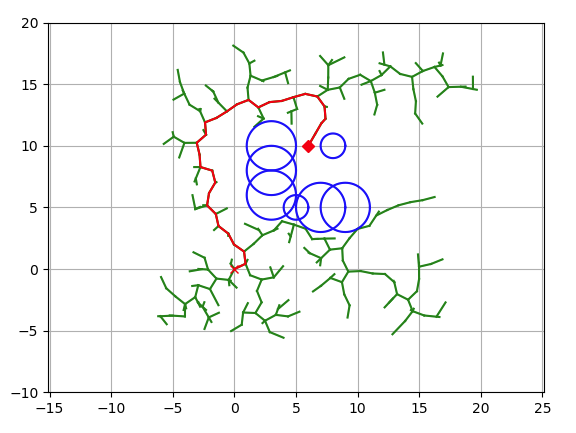
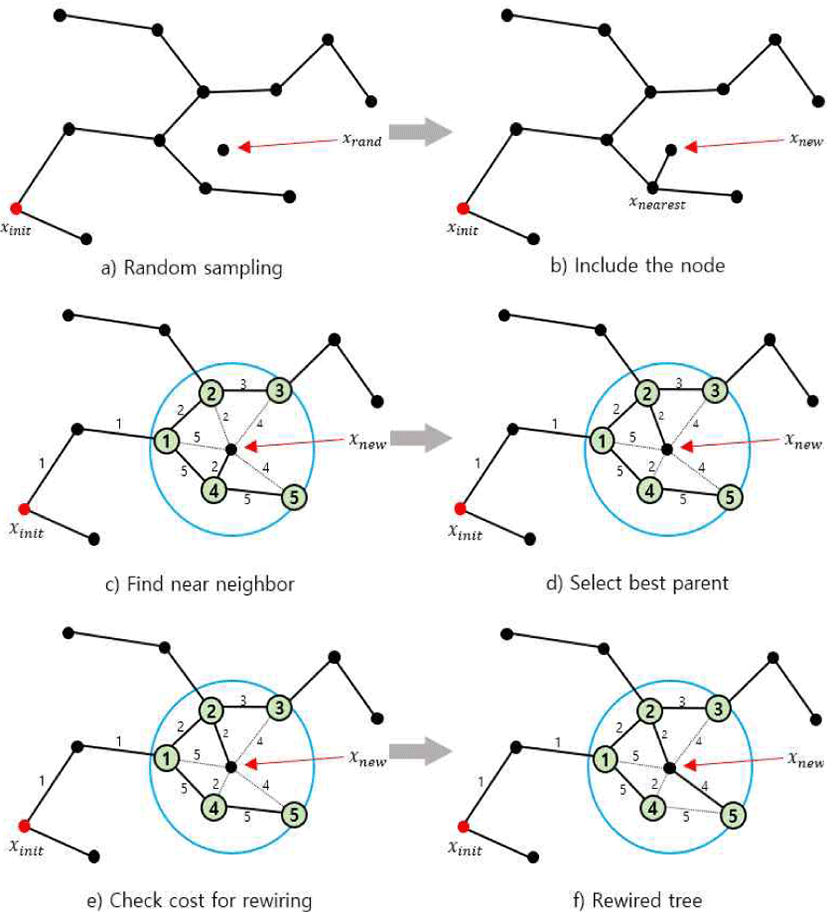
Ⅳ. RRT* Algorithm
- 트리를 구성하는 노드를 대체하여 비용을 줄일 수 있으면 기존 노드를 대체하여 트리를 구성
1. 알고리즘
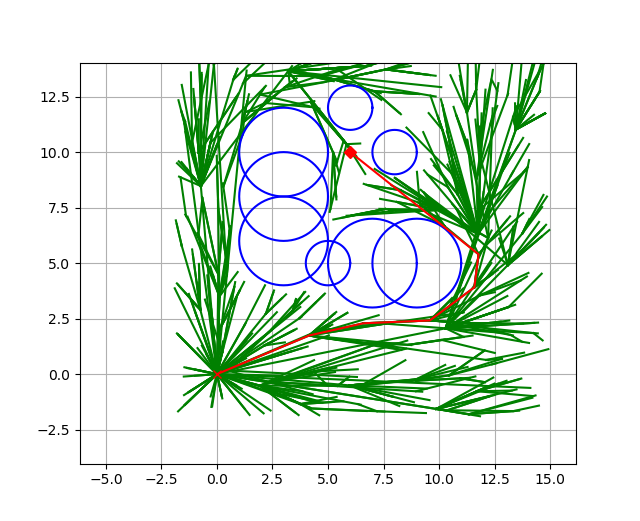
2. 예시
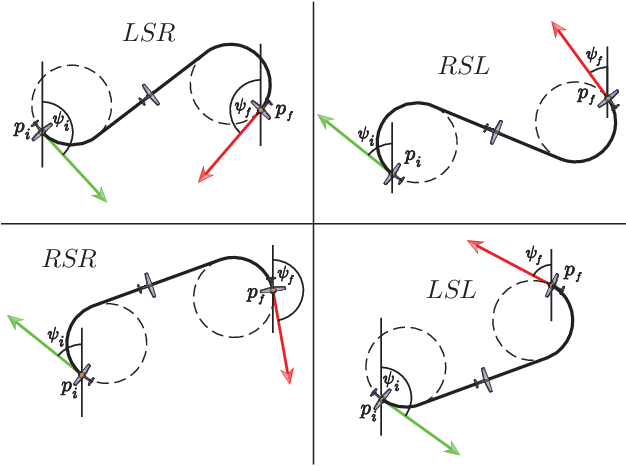
3. Dubins / CCRS
-
RRT*의 node를 extend할때 사용할 수 있음
-
두 노드를 잇는 곡선 경로를 계산
-
Continuous Curvature Reeds-Sheep
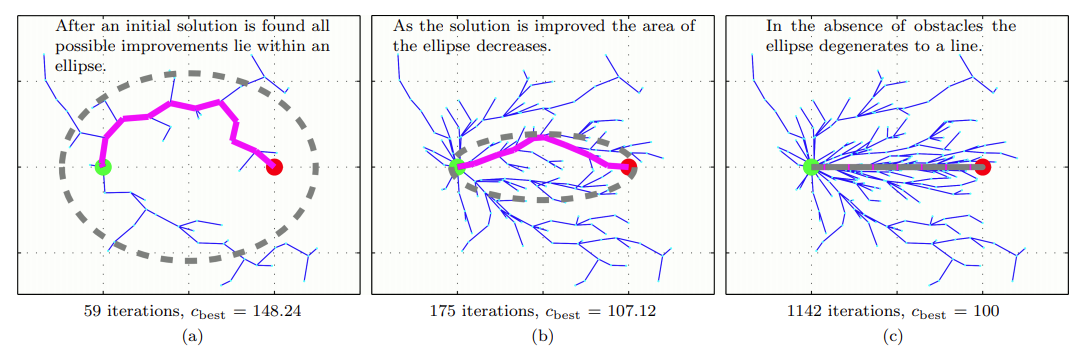
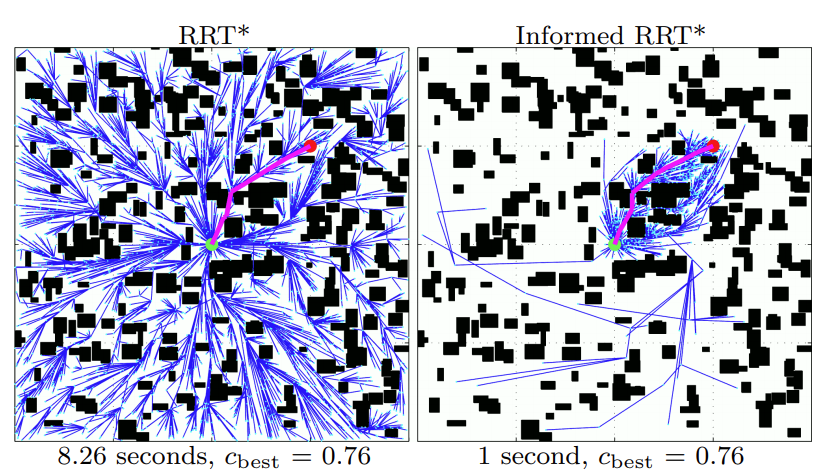
Ⅴ. Informed RRT* Algorithm
- Searching area를 제한해서 planning 효율성을 높임
1. 알고리즘
- initial solution을 구함
- solution의 길이를 장축으로 하고 start와 goal를 초점으로 하는 타원 생성
- 타원의 특성상 더 나은 solution은 타원 내부에서만 존재
- 타원 내에서 sampling을 진행해서 더 optimal한 solution 탐색
2. 비교
-
https://ai.stanford.edu/~ddolgov/papers/dolgov_gpp_stair08.pdf
-
https://msc9533.github.io/irl-study-2020/algorithm/2020/04/24/RRT_RRTstar.html
-
https://theclassytim.medium.com/robotic-path-planning-rrt-and-rrt-212319121378
-
https://scienceon.kisti.re.kr/srch/selectPORSrchArticle.do?cn=JAKO201620049013432&dbt=NART
