
Ⅰ. launch file
- 여러개의 노드를 일일이 rosrun할 필요 없이 launch 파일을 작성하여 roslaunch로 동시에 실행 가능
- 파라미터 값을 노드에 전달 가능
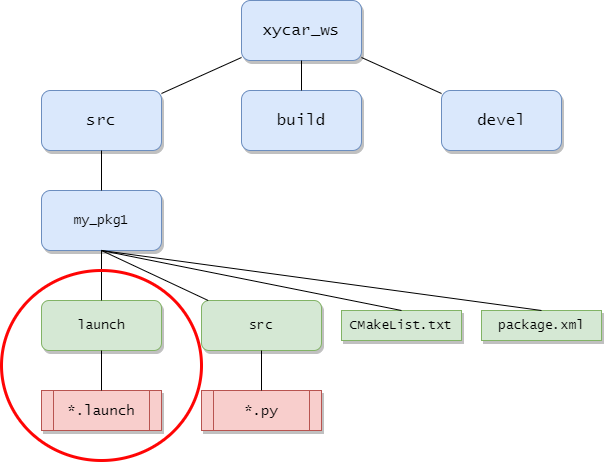
1. launch file 위치
- launch라는 디렉토리를 직접 생성 후 그 안에 작성
2. launch file 형식
- 확장자는
*.launch - 여기서
name="노드 명"은 소스파일 안에서 지정한 name보다 우선시 됨
<launch>
<include file="같이 실행할 *launch의 경로"/>
...
<node pkg="패키지명" type="노드가 포함된 소스파일 명" name="노드 명"/>
...
</launch>3. launch file 실행
$ roslaunch package_name launch_file- roscore를 따로 실행 할 필요 없음
Ⅱ. turtlesim으로 실습
- launch 디렉토리 생성 후 이동
jsg@jsg-ubuntu:~$ roscd my_pkg1 jsg@jsg-ubuntu:~/xycar_ws/src/my_pkg1$ mkdir launch jsg@jsg-ubuntu:~/xycar_ws/src/my_pkg1$ cd launch
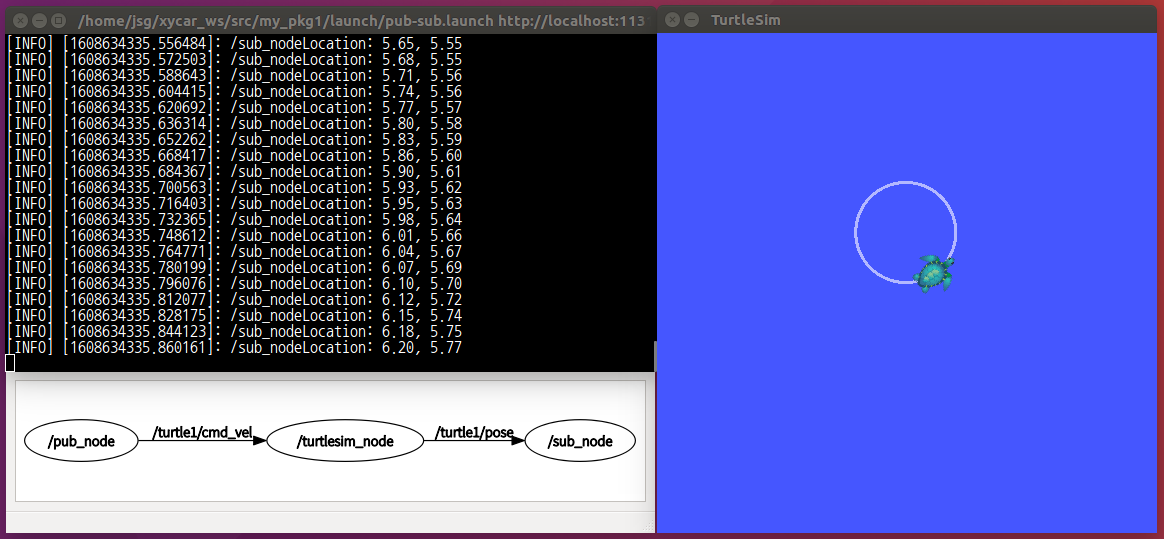
- 다음과 같이 pub-sub.launch 작성
<launch>
<node pkg="turtlesim" type="turtlesim_node" name="turtlesim_node"/>
<node pkg="my_pkg1" type="pub.py" name="pub_node"/>
<node pkg="my_pkg1" type="sub.py" name="sub_node" output="screen"/>
</launch>$ roslaunch my_pkg1 pub-sub.launch실행
Ⅲ. launch file로 파라미터 설정
1. launch file에 param tag 넣기
<launch>
<node pkg="패키지명" type="노드가 포함된 소스파일 명" name="노드 명">
<param name="변수 명" type="변수 타입" value="변수 값"/>
<param name="변수 명" type="변수 타입" value="변수 값"/>
...
</node>
</launch>- type 에는 str, int, double, bool, yaml 이 있고 생략시 str으로 인식
- 소스코드에서 이 파라미터 값을
rospy.get_param('~name')으로 불러올 수 있음
2. turtle의 회전반경 조절
- launch 디렉토리 안에 다음과 같이 pub-sub-param.launch 생성
<launch>
<node pkg="turtlesim" type="turtlesim_node" name="turtlesim_node"/>
<node pkg="my_pkg1" type="pub_param.py" name="pub_node_param">
<param name="circle_size" value="2"/>
</node>
<node pkg="my_pkg1" type="sub.py" name="sub_node" output="screen"/>
</launch>- src 디렉토리 안에 다음과 같이 pub_param.py 생성
#! /usr/bin/env python
# -*- coding: utf-8 -*-
import rospy
from geometry_msgs.msg import Twist
rospy.init_node('my_node', anonymous=True)
pub = rospy.Publisher('/turtle1/cmd_vel', Twist, queue_size=10)
msg = Twist()
# 파라미터를 launch에서 불러옴
linear_x = rospy.get_param('~circle_size')
msg.linear.x = linear_x
msg.linear.y = 0.0
msg.linear.z = 0.0
msg.angular.x = 0.0
msg.angular.y = 0.0
msg.angular.z = 1.8
rate = rospy.Rate(1)
while not rospy.is_shutdown():
pub.publish(msg)
rate.sleep()- roslaunch my_pkg1 pub-sub-param.launch 로 실행
| value="2" | value="4" |
|---|---|
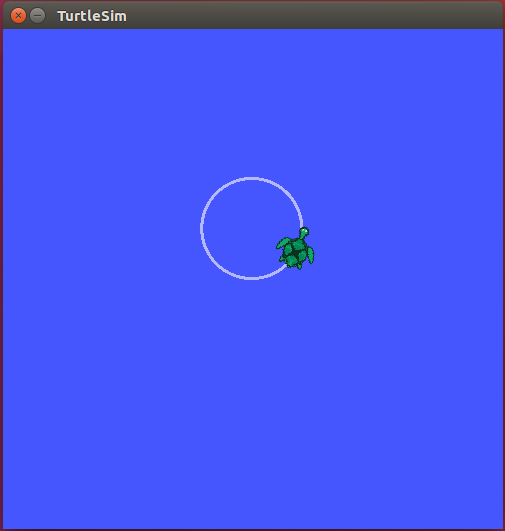 |  |
