1. 포트포워딩
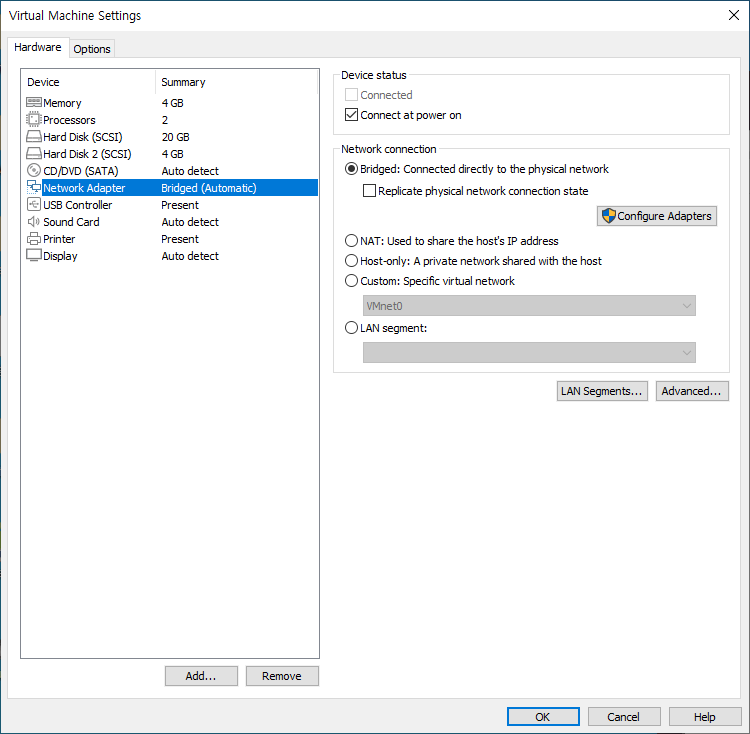
- VMware를 쓰는 경우 네트워크 설정을 Bridged로 변경해야 함
-
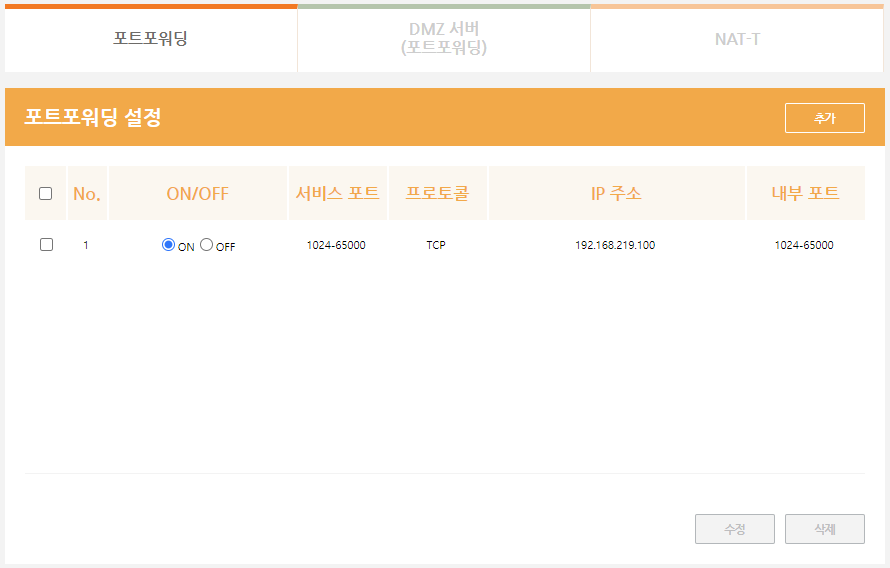
공유기마다 설정방법이 다르나 비슷비슷함
-
1204~65000 포트를 자신의 사설ip 앞으로 forwarding
-
외부에서 공유기를 통해 1024~65000 포트로 들어온 요청을 설정한 머신으로 리다이렉션 시킴
2. /etc/hosts 에 통신할 머신 주소 추가
-
sudo 권한으로 수정할 수 있음
-
핸드폰에 번호와 이름을 추가하는 것과 비슷한 원리
-
상대방_공인_ip : 상대방이 네이버에 "내 ip 검색"으로 찾은 값
-
상대방_hostname : 상대방이
$ uname -n으로 출력된 값
127.0.0.1 localhost 127.0.1.1 jsg-ubuntu # The following lines are desirable for IPv6 capable hosts ::1 ip6-localhost ip6-loopback fe00::0 ip6-localnet ff00::0 ip6-mcastprefix ff02::1 ip6-allnodes ff02::2 ip6-allrouters # 이 부분 추가 # 상대방_공인_ip 상대방_hostname 121.168.XXX.XXX user-virtual-machine
3. .bashrc 에 ROS_MASTER_URI / ROS_HOSTNAME 추가
- ROS_MASTER_URI : 마스터의 주소를 지정함
- ROS_HOSTNAME : 내 노드의 주소를 지정함
- ROS_HOSTNAME의 경우 기본적으로 자동으로 설정이 되지만 다르게 설정되는 경우도 있음 (이것 때문에 개고생)
Master(Roscore를 돌리는 머신)
export ROS_MASTER_URI=http://자신의_hostname:11311 export ROS_HOSTNAME=자신의_hostname
나머지 머신
export ROS_MASTER_URI=http://master의_hostname:11311 export ROS_HOSTNAME=자신의_hostname
4. 원격으로 turtlesim 조작
-
위에 설정을 다 끝내고 마스터쪽에서 roscore 실행
-
한쪽이
$ rosrun turtlesim turtlesim_node를 실행 -
다른 한쪽이
$ rosrun turtlesim turtle_teleop_key실행 -
원격으로 거북이 조종이 가능함