3D 모델링
-
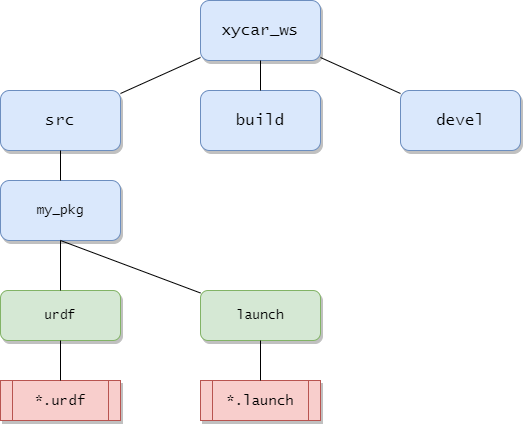
$ catkin_create_pkg pkg_name roscpp tf geometry_msgs urdf rviz xacro -
$ mkdir urdf후 그 밑에my_model.urdf작성 -
$ mkdir launch후 그 밑에my_launch.launch작성 -
$ cm -
$ check_urdf my_model.urdf: 문법적 오류가 있는지 확인
jsg@jsg-ubuntu:~/xycar_ws/src/my_urdf/urdf$ check_urdf my_model.urdf robot name is: ex_urdf_pan_tilt ---------- Successfully Parsed XML --------------- root Link: base_link has 1 child(ren) child(1): pan_link child(1): tilt_link
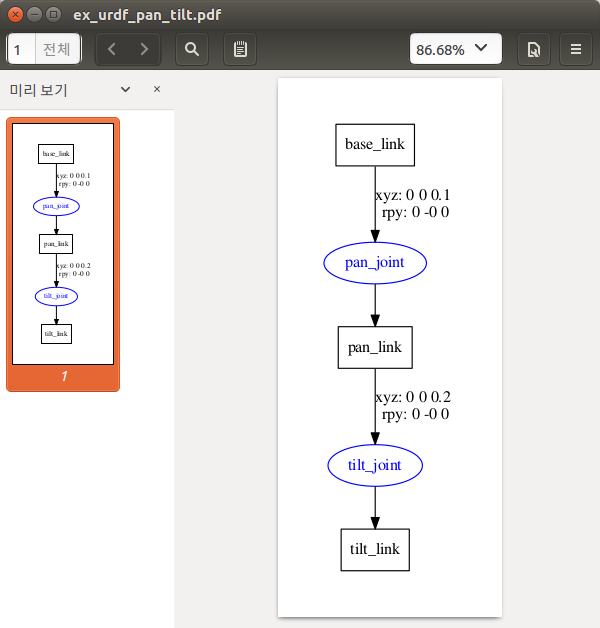
$ urdf_to_graphiz my_model.urdf: urdf 시각화
jsg@jsg-ubuntu:~/xycar_ws/src/my_urdf/urdf$ urdf_to_graphiz my_model.urdf Created file ex_urdf_pan_tilt.gv Created file ex_urdf_pan_tilt.pdf
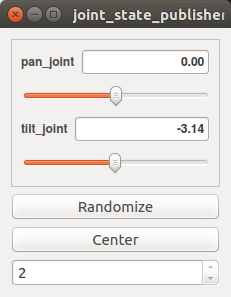
$ sudo apt install ros-kinetic-joint-state-publisher-gui: joint를 수동으로 움직이기 위한 gui 패키지 설치
$ roslaunch my_urdf my_launch.launch
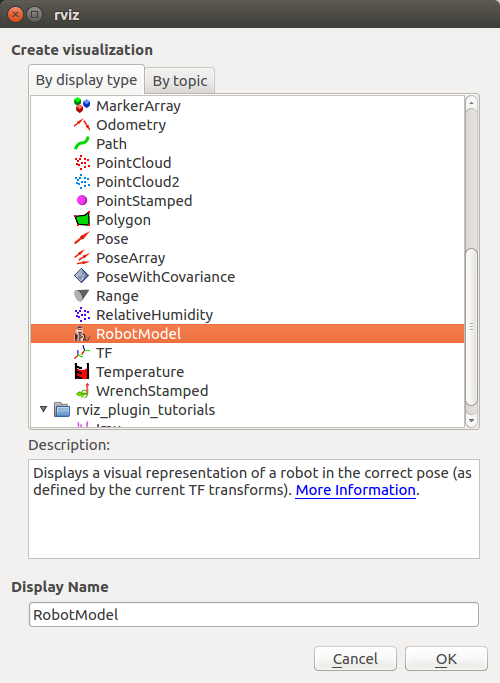
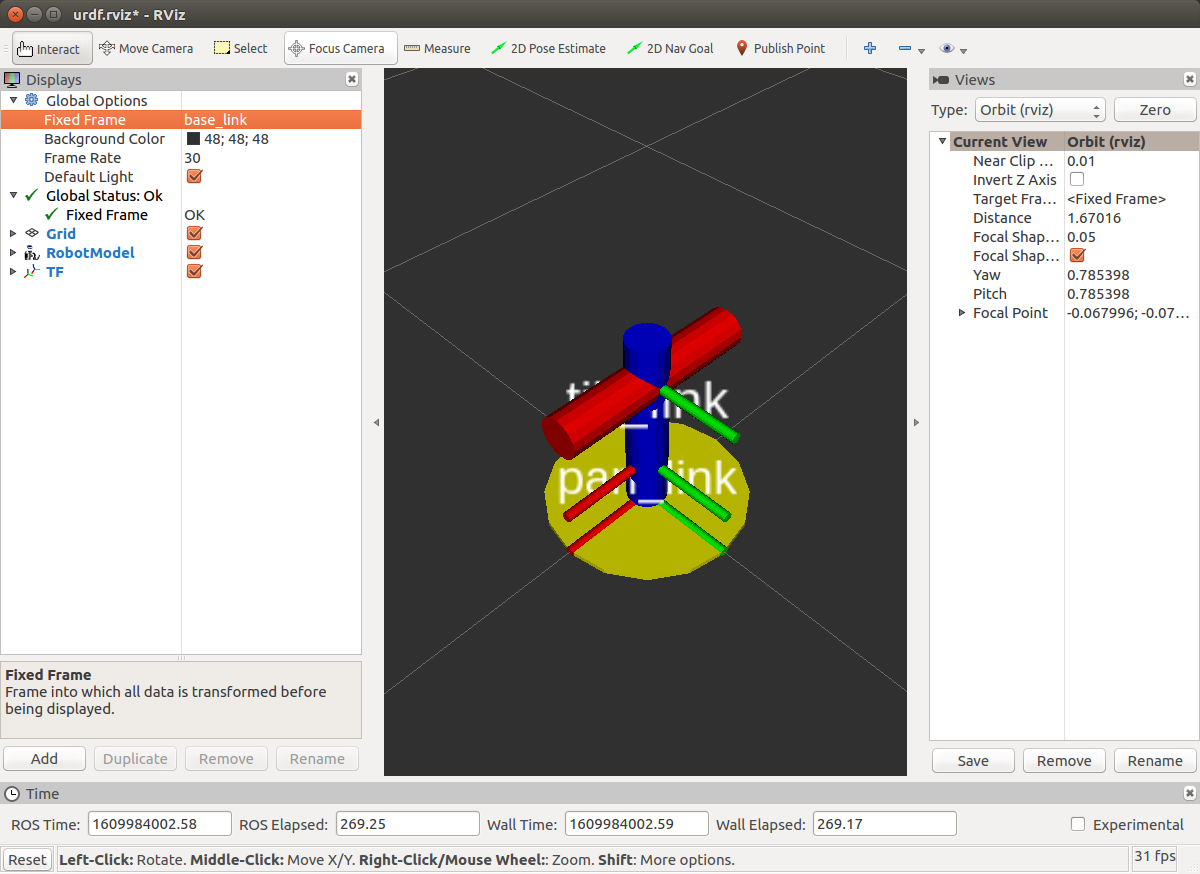
- Add 버튼을 누른 뒤 RobotModel과 TF를 추가
- Fixed Frame을 base_link로 설정
- joint-state-publisher-gui를 통해 joint를 수동으로 움직일 수 있음
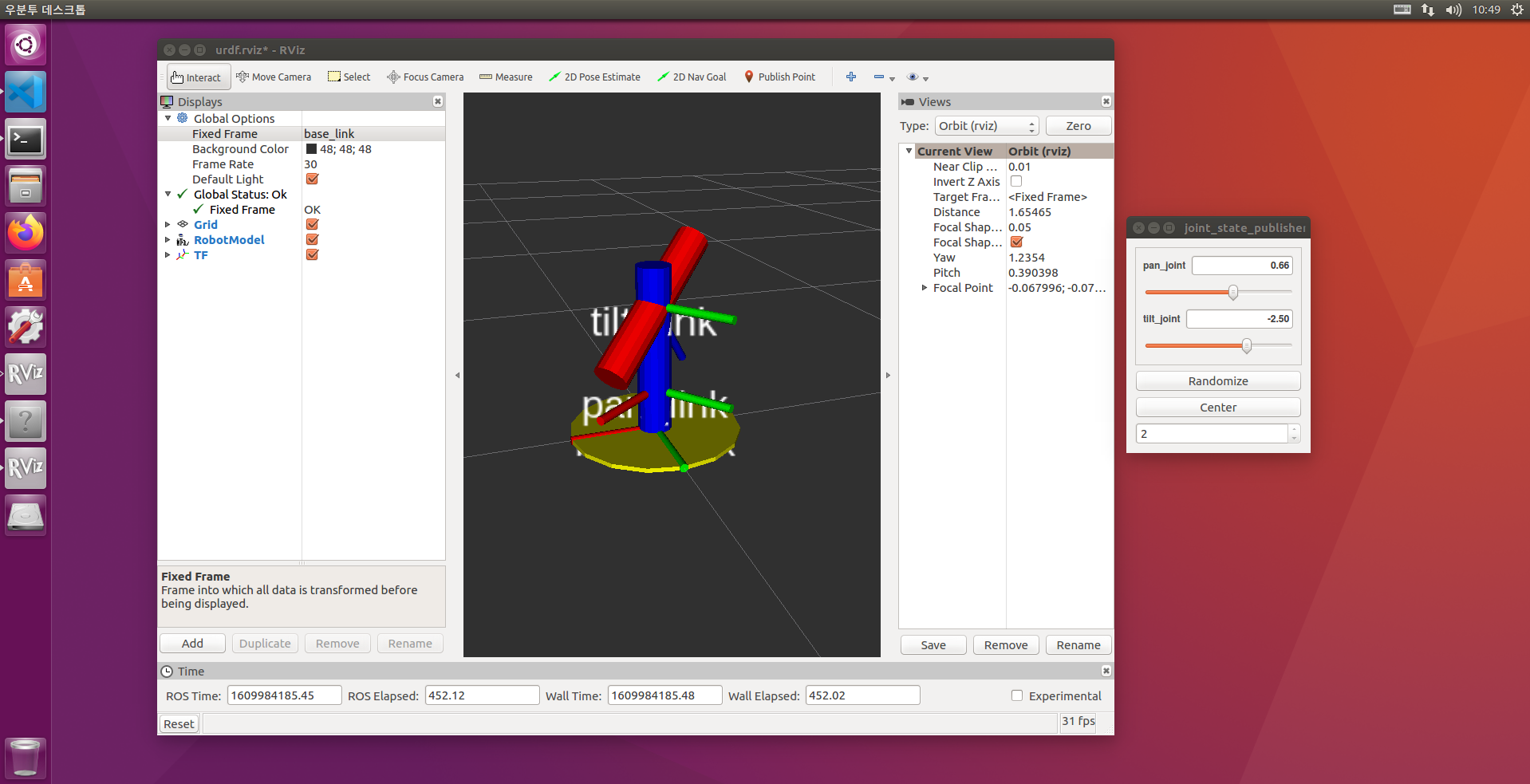
- 종료시 Save를 누르면 설정을 저장하고 종료된다