LiDAR Remote Sensing
임정호 교수님 자료 8장이다.
Light Detection and Ranging(LiDAR)
LiDAR에는 Airbone LiDAR, Spaceborne LiDAR, Ground LiDAR, Atmorspheric LiDAR (땅에서 대기로 레이저 쏨)등이 있다.
Digital Elevation Model
Digital Elevation Models(DEM)은 지역의 elevation point(지형의 높이 정보를 말하는 것 같다.)를 포함한 file이나 database를 의미한다.
DEM은 2가지 종류로 나뉜다.
- Digital Surface Model(DSM): 지역에 존재하는 모든 것의 대한 높이가 표시되어 있는 것이다.(나무, 빌딩, 다른 건축물 등)
- Digital Terrain Models(DTM): 오직 지구표면 땅의 대한 높이 정보만 담고 있는 것을 말한다.
DEM 정보를 얻기 위한 주요 4가지 방법은 다음과 같다.
- in situ surveying (직접 측정)
- photogrammetry (사진을 분석해서 높이 계산)
- Interferometric Synthetic Aperture Radar(InSAR)
두개 이상의 위성을 사용하여 얻은 다른 시점의 이미지를 활용해서 고도 측정 - Light Detection and Ranging(LiDAR)
항공기에서 지표면을 향해 레이저를 발사해 되돌아온 시간을 이용해 고도를 계산하는 것
LiDAR의 역사
맨 처음 광학 레이저는 1960년에 발사되었고 초기엔 항공기 바로 아래의 위치만 측정할 수 있었는데 GPS와 inertial measurement units(IMUs)를 통해 더 좋은 정보를 얻을 수 있게 되었다.
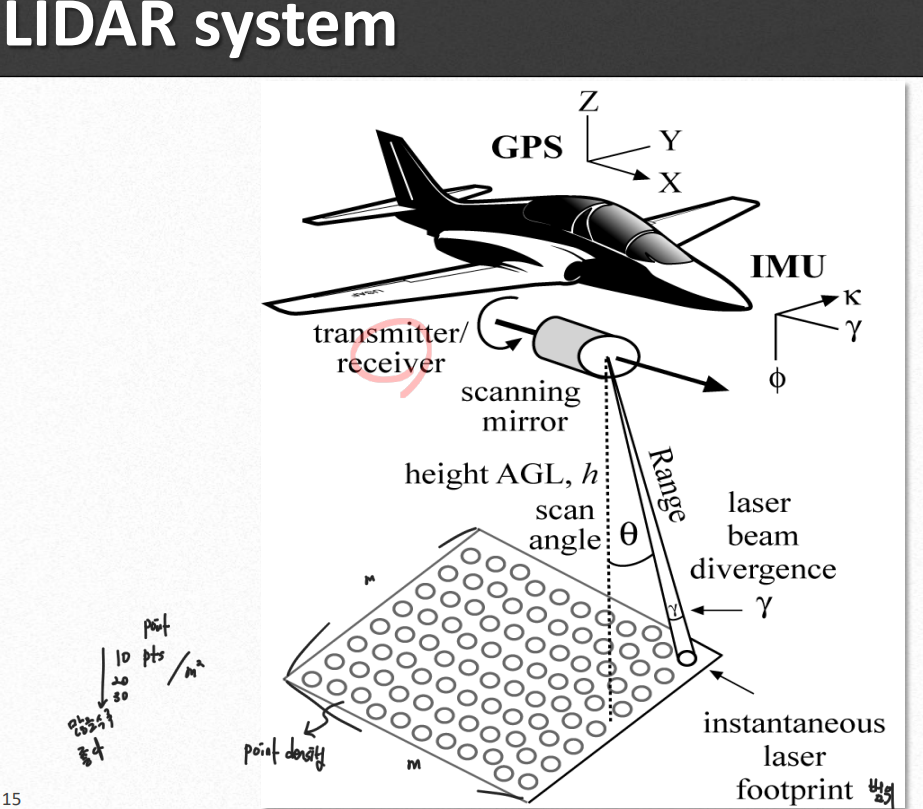
LiDAR는 system controller와 transmitter 그리고 receiver로 구성되어있고 비행기 방향의 수직으로 mirror를 돌려가며 레이저를 쏜다.
사진을 봐도 뭔가 다 알진 못하겠다.
topographic mapping(지형매핑)은 눈에 안전한 1040 ~ 1060nm 영역의 near-infrared 영역을 사용한다.
Blue-green laser (대략 532nm) 영역대는 물을 잘 뚫기 때문에 해양 수심을 측정하는데 쓰인다.
LiDAR는 active sensor이기 때문에 밤이나 낮 둘 다 측정이 가능하다.
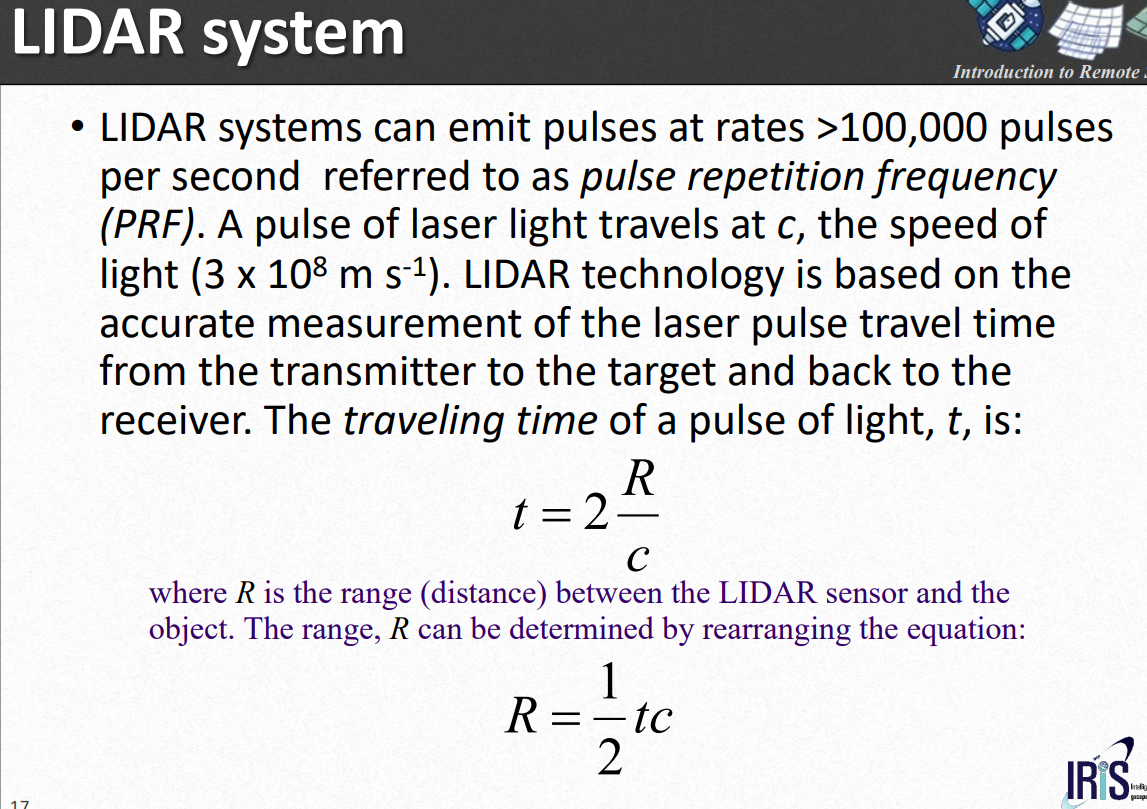
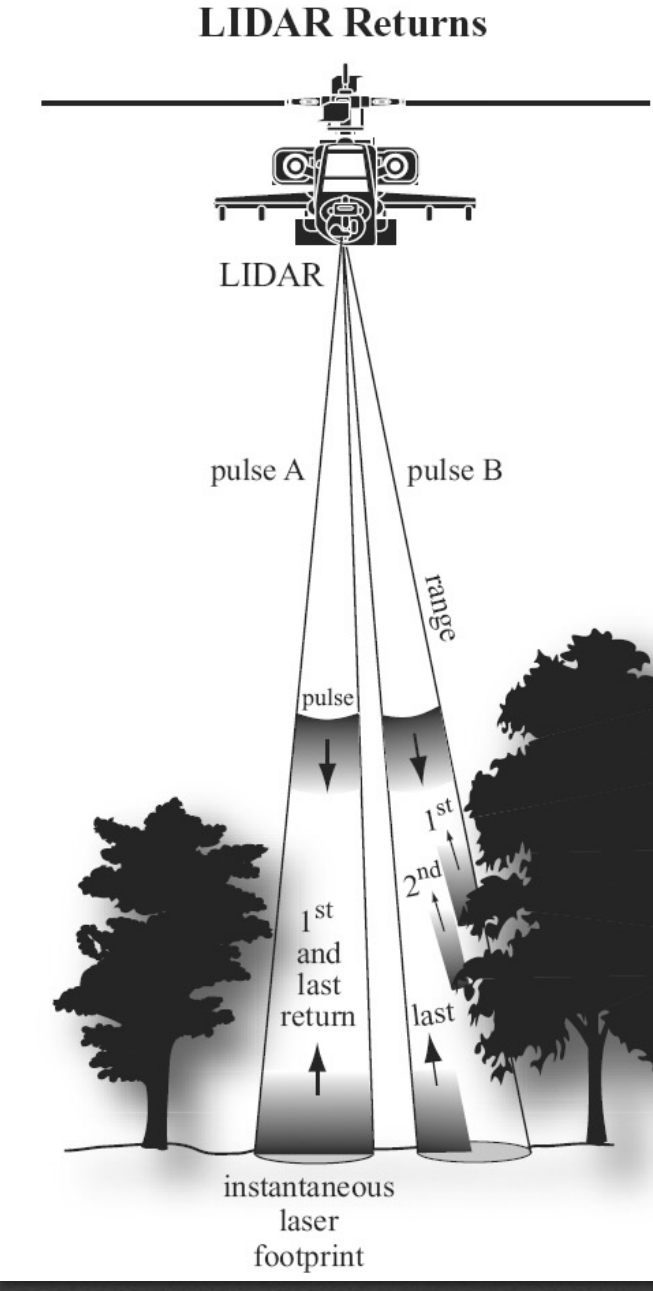
위 사진에서 pulse라는 개념이 뭔지 잘 몰라서 알아봤는데 한개의 펄스는 특정한 주파수와 지속시간을 갖는다고 한다. 처음엔 광자인가 했는데 그게 아니고 그냥 흔히 아는 전자기파인데 이걸 구별 가능한 10만개 전자기파로 만들어 쏜다는 것 같다.
초당 10만개의 펄스를 방출하고 한개의 펄스는 빛의 속도로 나아간다. 거리 R을 측정하는 방법이 위 사진에 나와있다. target을 찍고 sensor로 돌아와야하기 때문에 /2가 들어가는 것을 볼 수 있다.
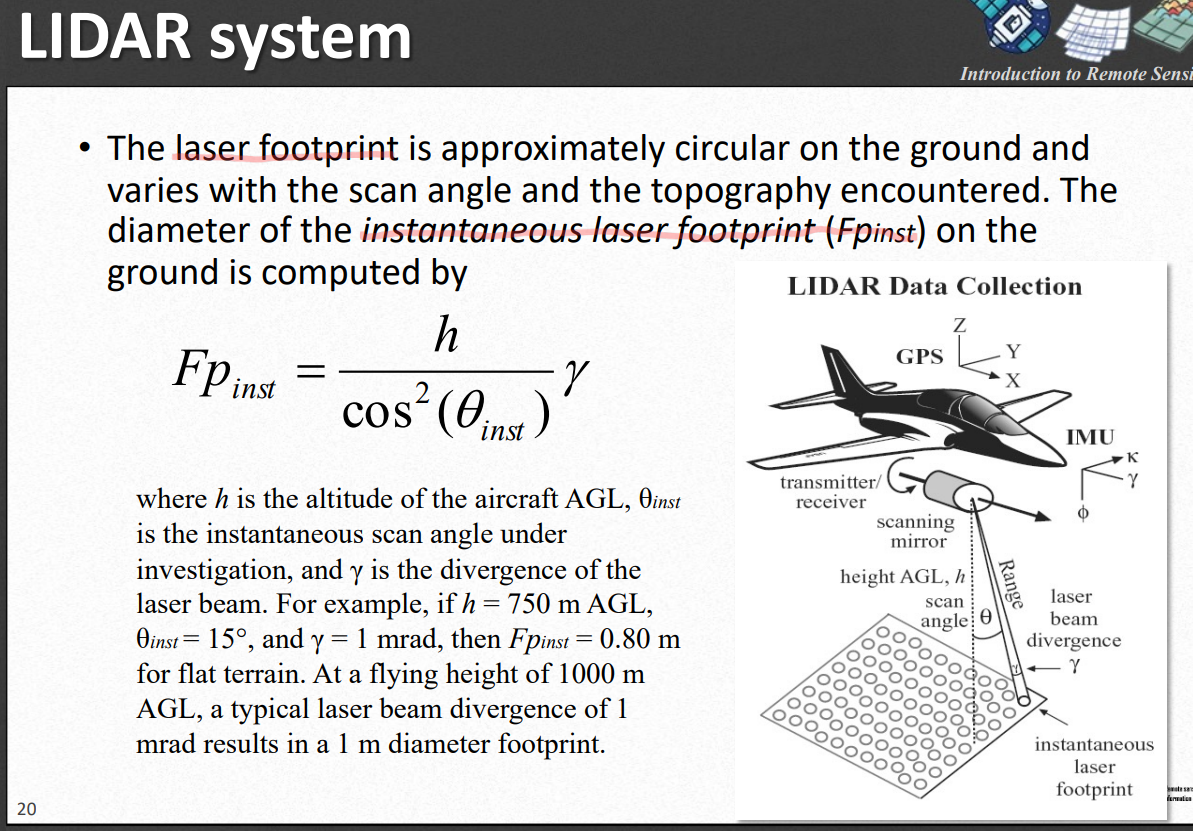
한 순간에 센서가 보는 영역은 동그라미 모양이라고 하고 거울이 돌아가면서 찍기 때문에 영역의 크기가 바뀐다고한다. 그 크기를 구하는 공식이 위 사진에 나와있는데 가 사진의 를 말하는지는 잘 모르곘지만 그런것같다. (아니면 FOV에서 theta를 뺀 값인가?)
swath를 구하는 공식은 아래와 같다.
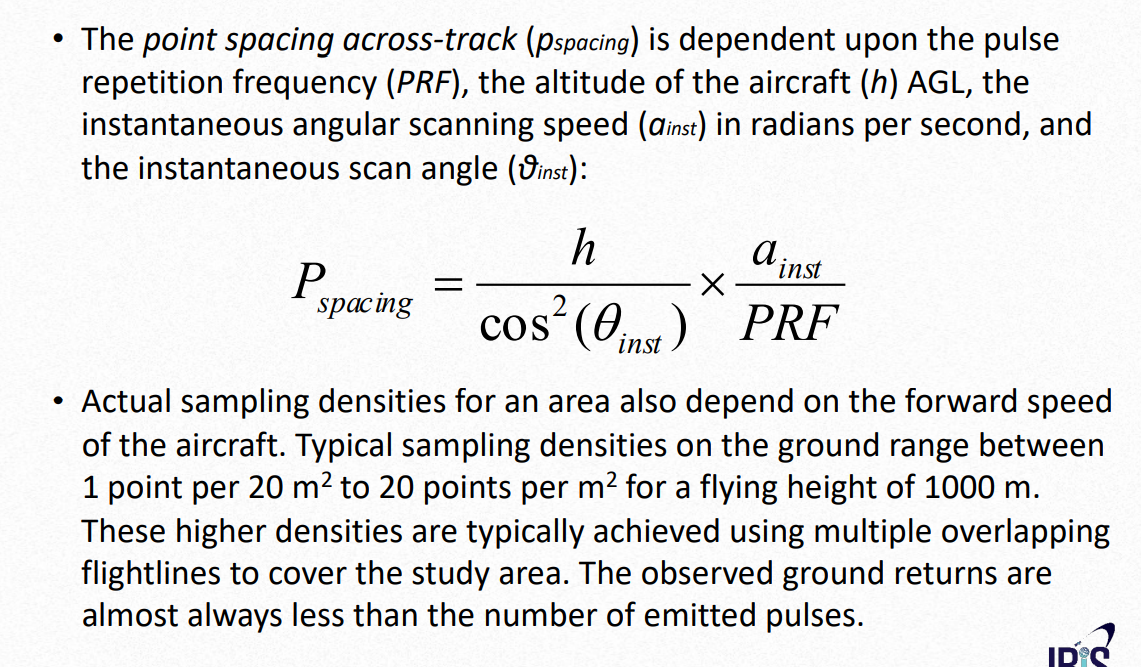
이 사진은 무슨 소린지 전혀 모르겠다
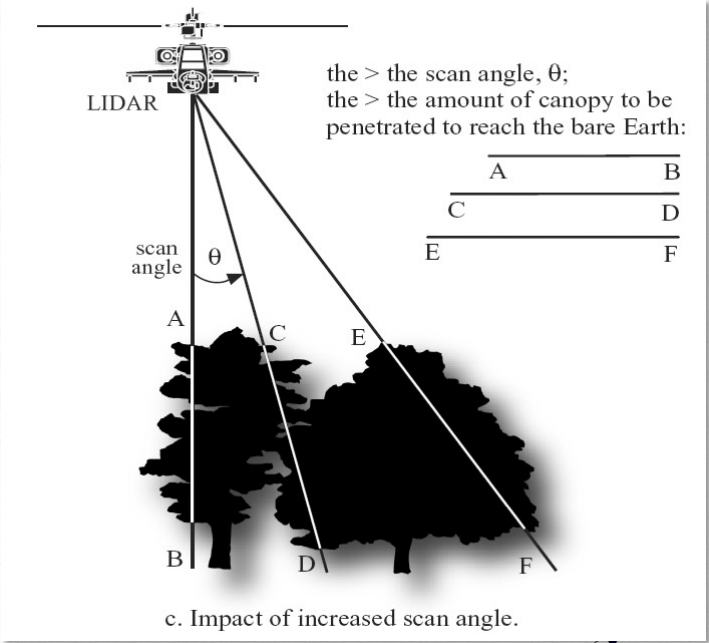
nadir로부터 각도가 벌어질수록 canopy(식물들로 인해 생기는 덮개를 말한다고한다.)가 평평하다고 했을 때 빛이 땅을 찍고 돌아와야하는 거리가 점점 늘어나는 문제가 있다.
데이터를 수집하는 동안 LiDAR 센서가 정확히 어디에 있는지 아는것은 중요한데 이것을 Differential Global Positioning System(DGPS) 기술을 이용해 달성했다. DPGS는 두개의 GPS를 사용해 동시에 좌표정보를 기록한다고 한다. terrestrial GPS는 지상의 잘 문서화된(?) x,y,z 좌표에 있고 다른 하나는 항공기에 붙어서 LIDAR 안테나의 위치를 기록하고 있다.
데이터를 수집하는 동안 센서의 orientation informatin(roll, pitch, heading)의 정확한 정보 또한 가지고 있어야하고 이것은 inertial measurement unit(IMU)에 의해 기록된다.
최종 고도 정보는 WGS 84의 이진수형태나 ASCII, UTM좌표 형태로 나온다.
데이터가 생기지 않은 지역을 data voids라고 한다.
그림자를 이용한 고도 측정
태양이 특정 방향에서 물체를 비췄을 때 발생하는 그림자를 보고 물체의 대략적인 고도를 판단하는 것
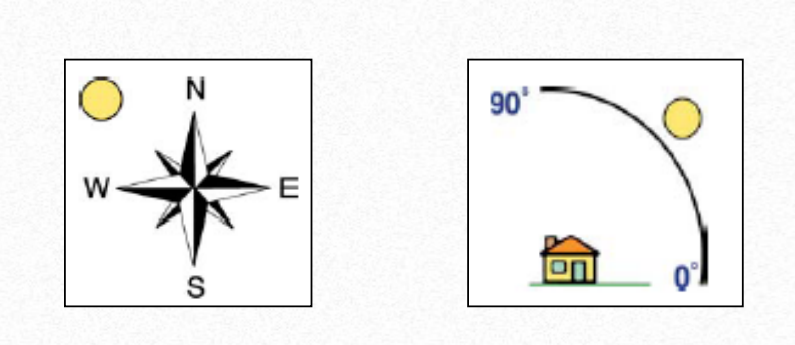
Hill shading
Azimuth angle: 북을 기준으로 태양이 시계방향으로 몇도에 있는가 (0~360)
Altitude angle: 물체를 비추는 어떤 무언가가 지평선으로부터 이루는 각도를 말한다. (0~90)
산출된 지형데이터의 점들을 이용해 맵을 만드는 기법으로 Triangulated Irregular Networks(TIN)과 Inverse Distance Weighted(IDW)가 있는데 이해는 전혀 못했다.
Extraction of bare-earth digital terrain models
만약 모델이 DTM일 경우 vegetation의 존재는 꽤 성가실 수 있다. 그래서 DTM 모델은 first, intermediate, last return 등을 잘 판단해서 없애기도 한다. 이 과정은 보통 두 단계로 나뉜다.
- semi-automatic masspoint filtering
- manual masspoint editing
첫번째 단계에서 각 masspoint와 이웃한 n nearest-neighbor들의 elevation charateristics를 연관지어 점들이 어느 클래스인지 판단하고 지운다. 이것을 LiDAR data classification이라고 한다.
Intensity 뭐라뭐라하는데 이해가 하나도 안되서 개 노잼이다.
