
Chapter6 직접 코딩으로 해보는 Object detection 모델 학습
- import
import torch
import torchvision
from torchvision import datasets, models
from torchvision.transforms import functional as FT
from torchvision import transforms as r
from torch import nn, optim
from torch.nn import functional as F
from torch.utils.data import DataLoader, sampler, random_split, Dataset
import copy
import math
from PIL import Image
import cv2
import albumentations as A
from albumentations.pytorch import ToTensorV2
from pycocotools.coco import COCO
import matplotlib.pyplot as plt
%matplotlib inlineimport warnings
warnings.filterwarnings('ignore')
from collections import defaultdict, deque
import datetime
import time
from tqdm import tqdm
from torchvision.utils import draw_bounding_boxes
from torch.utils.tensorboard import SummaryWriter- 모듈 동작 확인
print(torch.__version__)
print(torchvision.__version__)- 데이터셋 (아쿠아리움 데이터)
!unzip '데이터 경로/Aquarium Combined.v2-raw-1024.coco.zip' -d '/content/Aquarium'- 변환함수
def get_transforms(train=False):
if train :
transforms = A.Compose([
A.Resize(600,600),
A.HorizontalFlip(p=0.3),
A.VerticalFlip(p=0.3),
A.RandomBrightnessContrast(p=0.1),
A.ColorJitter(p=0.1),
ToTensorV2()
], bbox_params=A.BboxParams(format='coco'))
else :
transforms = A.Compose([
A.Resize(600,600),
ToTensorV2()
], bbox_params=A.BboxParams(format='coco'))
return transformsdef collate_fn(batch):
return tuple(zip(*batch))- 데이터 셋 관련 함수
class AquariumDetection(datasets.VisionDataset):
def __init__(self, root, split='train', transform=None, target_transform=None, transforms=None):
super().__init__(root, transforms, transform, target_transform)
self.split = split
self.coco = COCO(os.path.join(root, split, "_annotations.coco.json"))
self.ids = list(sorted(self.coco.imgs.keys()))
self.ids = [id for id in self.ids if (len(self._load_target(id)) > 0)]
def _load_image(self, id:int):
path = self.coco.loadImgs(id)[0]['file_name']
image = cv2.imread(os.path.join(self.root, self.split, path))
image = cv2.cvtColor(image, cv2.COLOR_BGR2RGB)
return image
def _load_target(self, id):
return self.coco.loadAnns(self.coco.getAnnIds(id))
def __getitem__(self, index):
id = self.ids[index]
image = self._load_image(id)
target = self._load_target(id)
# target = copy.deepcopy(self._load_target(id))
boxes = [t['bbox'] + [t['category_id']] for t in target]
if self.transforms is not None :
transformed = self.transforms(image=image, bboxes = boxes)
image = transformed['image']
boxes = transformed['bboxes']
new_boxes = []
for box in boxes:
xmin = box[0]
xmax = xmin + box[2]
ymin = box[1]
ymax = ymin + box[3]
new_boxes.append([xmin, ymin, xmax, ymax])
boxes = torch.tensor(new_boxes, dtype=torch.float32)
targ = {}
targ['boxes'] = boxes
targ['labels'] = torch.tensor([t['category_id'] for t in target], dtype = torch.int64)
targ['image_id'] = torch.tensor([t['image_id'] for t in target])
targ['area'] = (boxes[:,3] - boxes[:,1])*(boxes[:,2] - boxes[:,0])
targ['iscrowd'] = torch.tensor([t['iscrowd'] for t in target], dtype=torch.int64)
return image.div(255), targ
def __len__(self):
return len(self.ids)- 데이터 전처리 및 확인
dataset_path = '/content/Aquarium'
coco = COCO(os.path.join(dataset_path, 'train', '_annotations.coco.json'))
categories = coco.cats
n_classes = len(categories.keys())
categories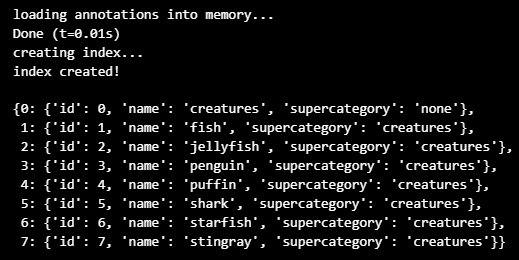
classes = [i[1]['name'] for i in categories.items()]
classes
train_dataset = AquariumDetection(root=dataset_path, transforms = get_transforms(True))sample = train_dataset[2]
img_int = torch.tensor(sample[0] * 255, dtype=torch.uint8)
plt.imshow(draw_bounding_boxes(
img_int, sample[1]['boxes'], [classes[i] for i in sample[1]['labels']], width=4
). permute(1,2,0))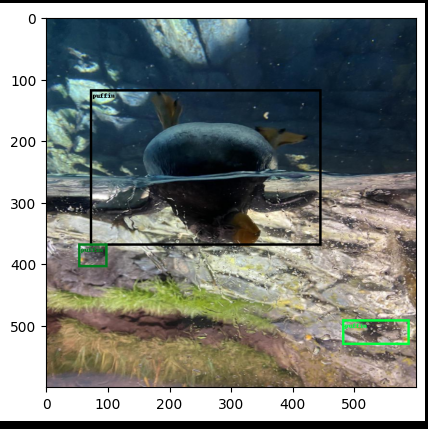
- 모델 준비
model = models.detection.fasterrcnn_mobilenet_v3_large_fpn(pretrained=True)
in_features = model.roi_heads.box_predictor.cls_score.in_features
model.roi_heads.boxpredictor = models.detection.faster_rcnn.FastRCNNPredictor(in_features, n_classes)train_loader = DataLoader(train_dataset, batch_size=4, shuffle=True, num_workers=4, collate_fn = collate_fn)images, targets = next(iter(train_loader))
images = list(image for image in images)
targets = [{k:v for k, v in t.items()} for t in targets]
output = model(images, targets)device = torch.device('cuda')
model = model.to(device)device = torch.device('cuda')
model = model.to(device)params = [p for p in model.parameters() if p.requires_grad]
optimizer = torch.optim.SGD(params, lr=0.01, momentum=0.9, nesterov=True, weight_decay=1e-4)def train_one_epoch(model, optimizer, loader, device, epoch):
model.to(device)
model.train()
all_losses = []
all_losses_dict = []
for images, targets in tqdm(loader):
images = list(image.to(device) for image in images)
targets = [{k:torch.tensor(v).to(device) for k, v in t.items()} for t in targets]
loss_dict = model(images, targets)
losses = sum(loss for loss in loss_dict.values())
loss_dict_append = {k:v.item() for k, v in loss_dict.items()}
loss_value = losses.item()
all_losses.append(loss_value)
all_losses_dict.append(loss_dict_append)
if not math.isfinite(loss_value):
print(f"Loss is {loss_value}, stopping training")
print(loss_dict)
sys.exit(1)
optimizer.zero_grad()
losses.backward()
optimizer.step()
all_losses_dict = pd.DataFrame(all_losses_dict)
print("Epoch {}, lr: {:.6f}, loss_classifier: {:.6f}, loss_box: {:.6f}, loss_rpn_box: {:.6f}, loss_object: {:.6f}".format(
epoch, optimizer.param_groups[0]['lr'], np.mean(all_losses),
all_losses_dict['loss_classifier'].mean(),
all_losses_dict['loss_box_reg'].mean(),
all_losses_dict['loss_rpn_box_reg'].mean(),
all_losses_dict['loss_objectness'].mean()
))
writer.add_scalar('lr', optimizer.param_groups[0]['lr'], epoch)
writer.add_scalar('loss', np.mean(all_losses), epoch)
writer.add_scalar('loss_classifier', all_losses_dict['loss_classifier'].mean(), epoch)
writer.add_scalar('loss_box_reg', all_losses_dict['loss_box_reg'].mean(), epoch)
writer.add_scalar('loss_rpn_box_reg', all_losses_dict['loss_rpn_box_reg'].mean(), epoch)
writer.add_scalar('loss_objectness', all_losses_dict['loss_objectness'].mean(), epoch)num_epochs = 10
writer = SummaryWriter()
for epoch in range(num_epochs):
train_one_epoch(model, optimizer, train_loader, device, epoch)
writer.flush()
writer.close()- 학습 결과 이미지로 확인
model.eval()
torch.cuda.empty_cache()test_dataset = AquariumDetection(root=dataset_path, split='test', transforms=get_transforms(False))img, _ = test_dataset[46]
img_int = torch.tensor(img*256, dtype=torch.uint8)
with torch.no_grad():
prediction = model([img.to(device)])
pred = prediction[0]
print(pred) 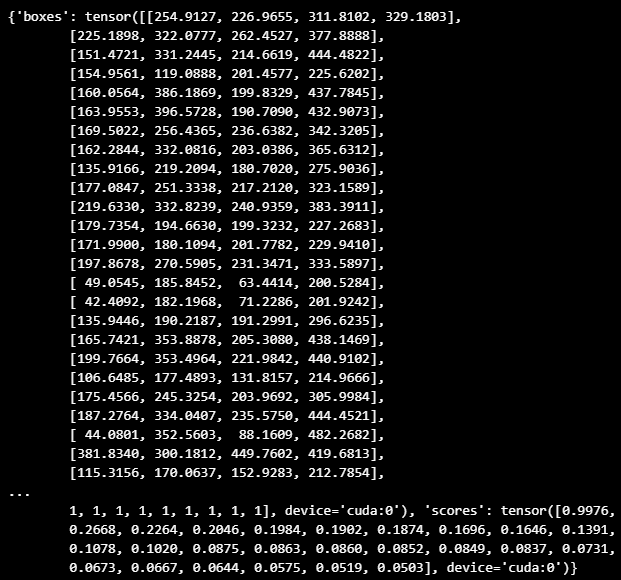
fig = plt.figure(figsize = (14, 10))
filtered_label = [classes[i] for i in pred['labels'][pred['scores'] > 0.8]]
filtered_score = [float(score) for score in pred['scores'][pred['scores']>0.8]]
label_text = [lbl + str(round(scr,2)) for lbl, scr in zip(filtered_label, filtered_score)]
plt.imshow(draw_bounding_boxes(img_int,
pred['boxes'][pred['scores'] > 0.8],
label_text, width=4
).permute(1, 2, 0))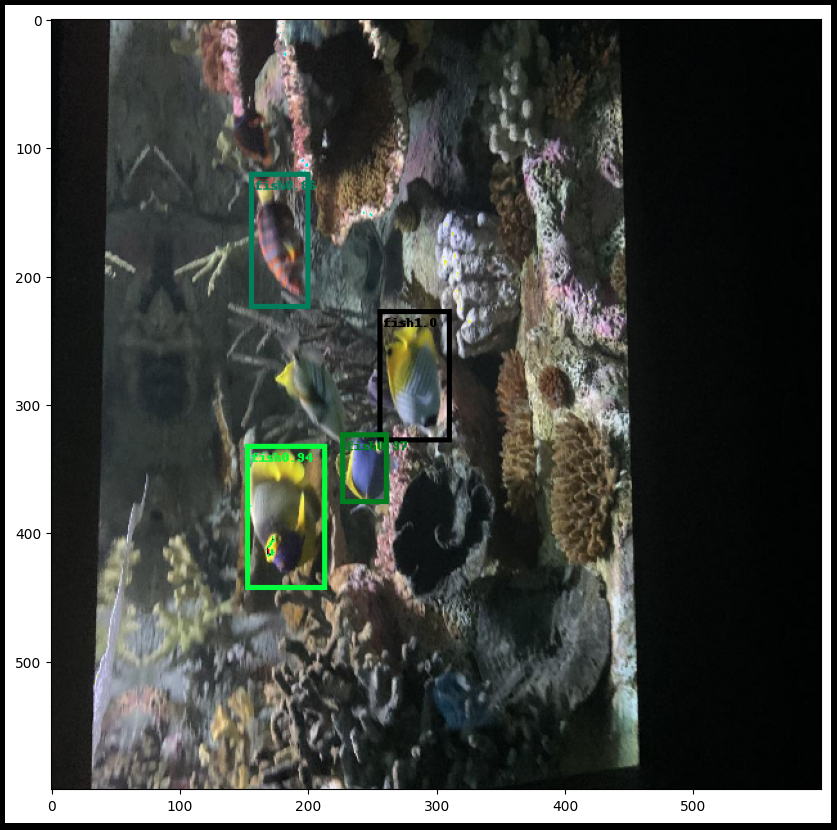
이 글은 제로베이스 데이터 취업 스쿨의 강의 자료 일부를 발췌하여 작성되었습니다
