
기존에 배운 Dynamic Programming에서는 MDP를 알고있다는 가정하에 문제를 풀었기에, Bellman Equation을 이용하여 최적화 정책을 찾았다.
그러나 모든 상황에서 MDP를 알 수 있는 상황이 있는 것은 아니다. 이러한 상황에서는 Model-free방식을 사용한다.
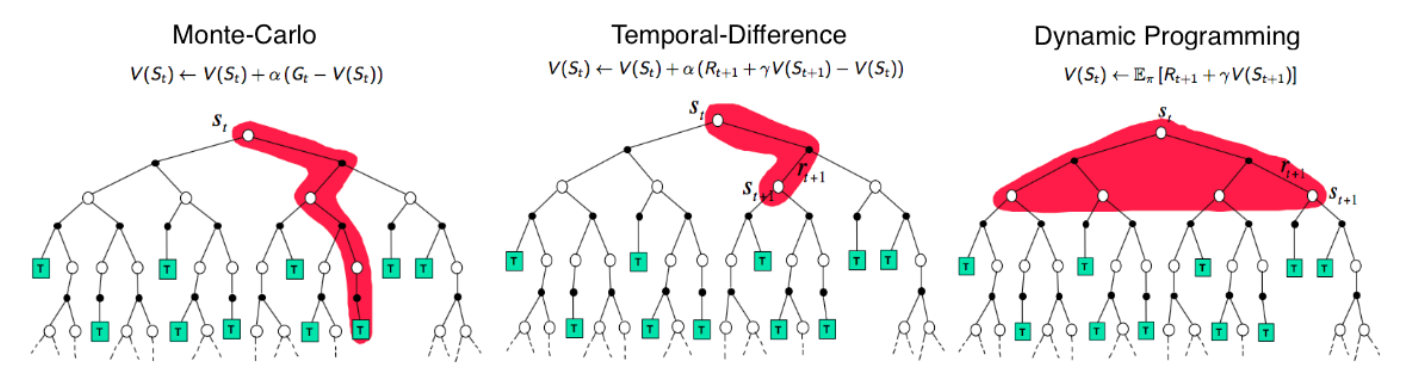
기존에 배웠던 Dynamic Programming에서는 다음과 같이 모든 action에 대한 가능성들의 Expectation을 계산하였다.
Monte Carlo Prediction
이번 Model-free에 해당하는 Monte Carlo Prediction 에서는 State가 어떻게 변하고, 어떠한 Reward가 모른지를 잘 모른다. 따라서 경험적인 정보들을 이용하여 해답을 찾아나간다.
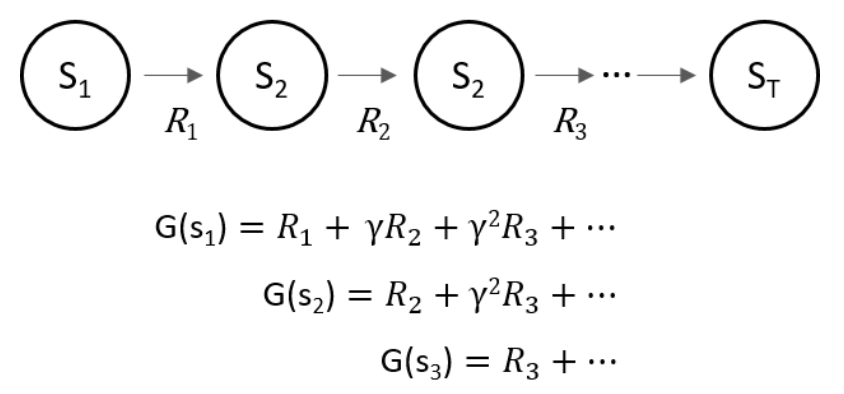
항상 에피소드가 완료되어 최종적으로 받는 보상의 평균을 구하여 학습을 진행한다.
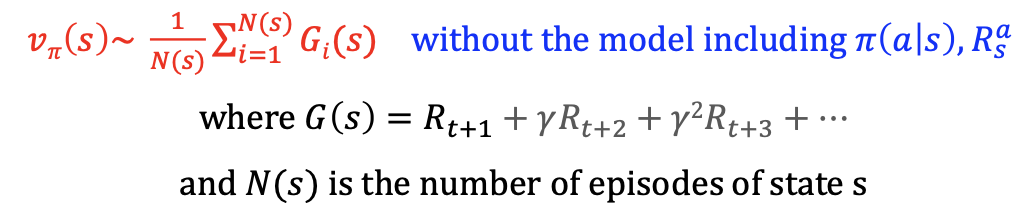
각 에피소드에서 얻은 Reward에 대한 평균값을 구하여 해당 state의 value를 구한다.
위의 식을 이용하여 의 의미를 파해쳐 보자.
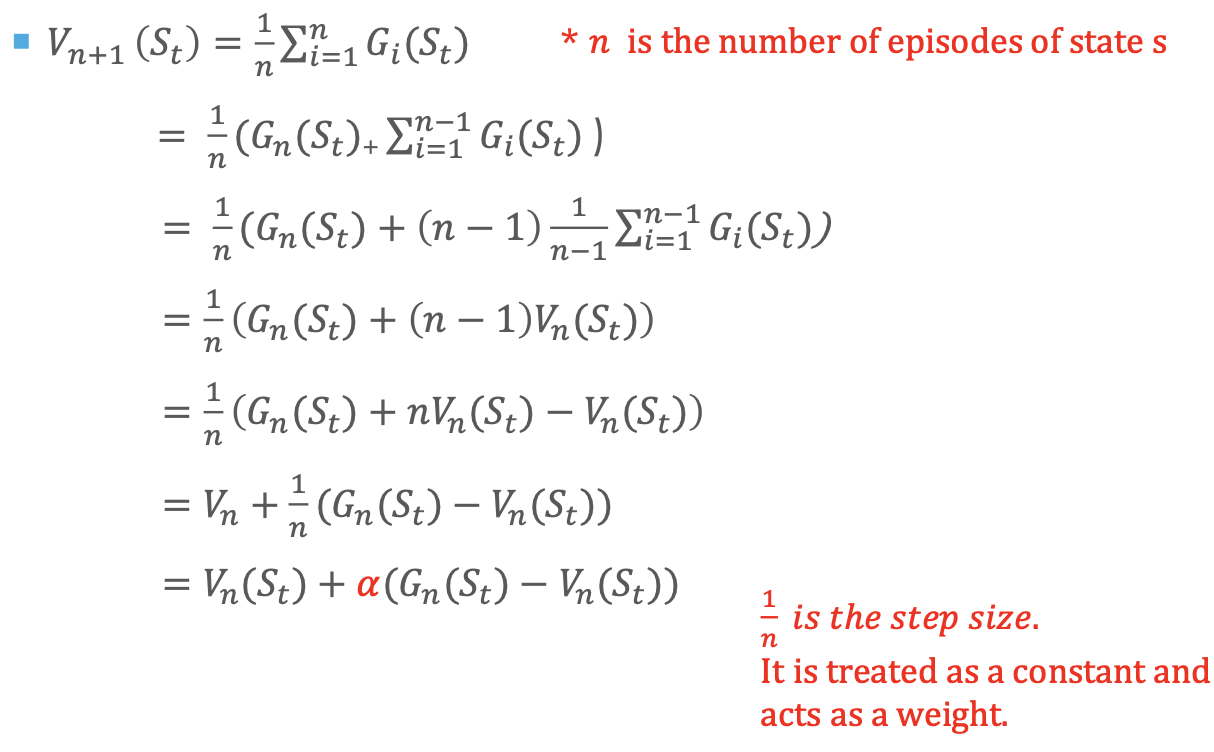
을 보면 여태까지 얻은 reward의 평균값을 이용하여 현재 state의 reward값을 판단할 수 있다.
하지만 이의 식을 정리한 결과인 을 보면 여태까지 얻은 value에 대한 정보인 에 현재 얻은 차이정보를 더한 것을 확인할 수 있으며, 가중치인 의 값이 점점 작아지는 것을 통하여 update되는 정보의 값이 점점 작아지는 것이라 이해하면 된다.
Temporal Difference Prediction
다음과 같은 정보를 얻기 위해서는 해당 에피소드가 끝난 뒤에야 해당 state를 얻을 수 있다는 것이다.
만약 전투기의 자율주행을 목적으로 강화학습을 학습시킨다고 한다면, 매 에피소드가 끝나기 위해서는 매 전투기가 부셔져야 한다는 것이다. 이러한 문제를 방지하고자 하기 위해 Temporal Difference Prediction을 사용한다.
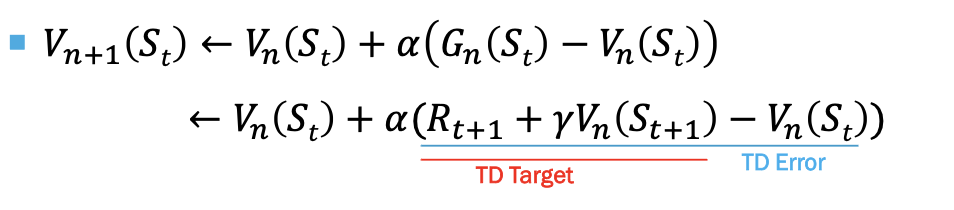
다음과 같이 을 로 변환하여 에피소드가 끝나기전에도 value를 update할 수 있도록 한다.
Reference
숨니의 무조건 따라하기 - https://sumniya.tistory.com/11
