object detection papers
1.YOLOv3:An Incremental Improvement Paper
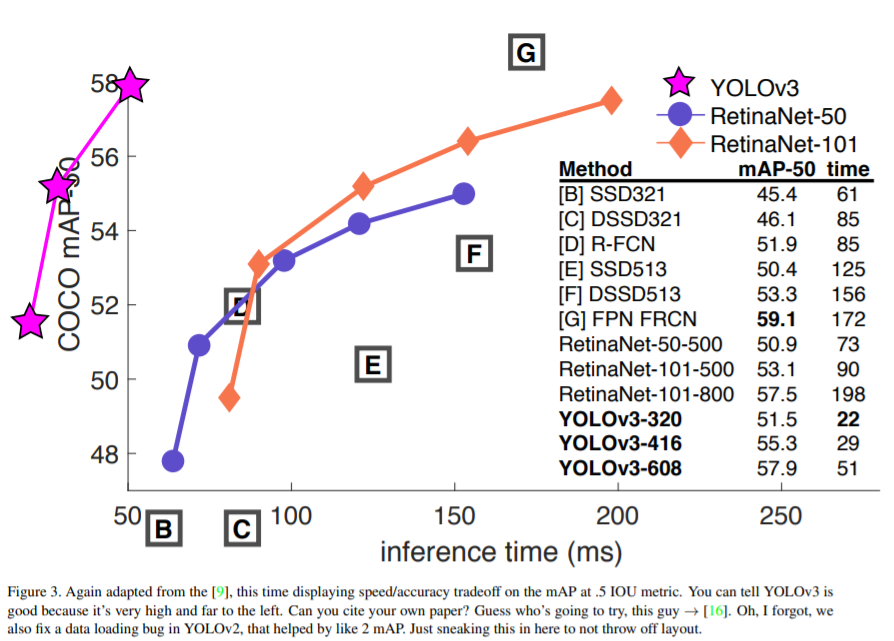
YOLOv3:An Incremental Improvement Paper ※ One stage object detector 논문 흐름 YOLOv1 => SSD => YOLOv2 => Feature Pyramid Network => RetinaNet => YOLOv3 =
2022년 2월 6일
2.YOLO9000 Paper
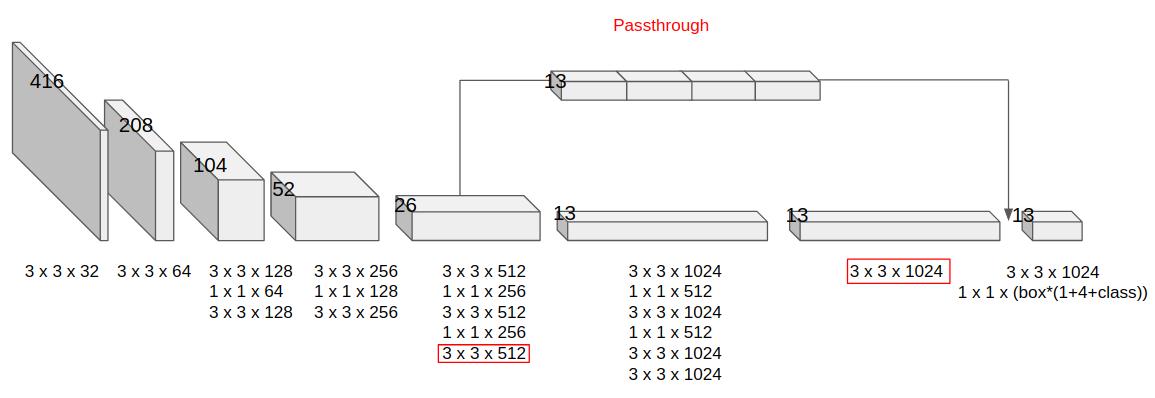
1.Abstaract & Introduction (1)YOLOv1 -one stage object detector:input image로부터 바로 bounding box를 찾음 -각 grid cell 마다 B개의 bounding box 예측(x,y,w,h,p_c(
2022년 1월 29일
3.End-to-End Object Detection with Transformers(DETR)
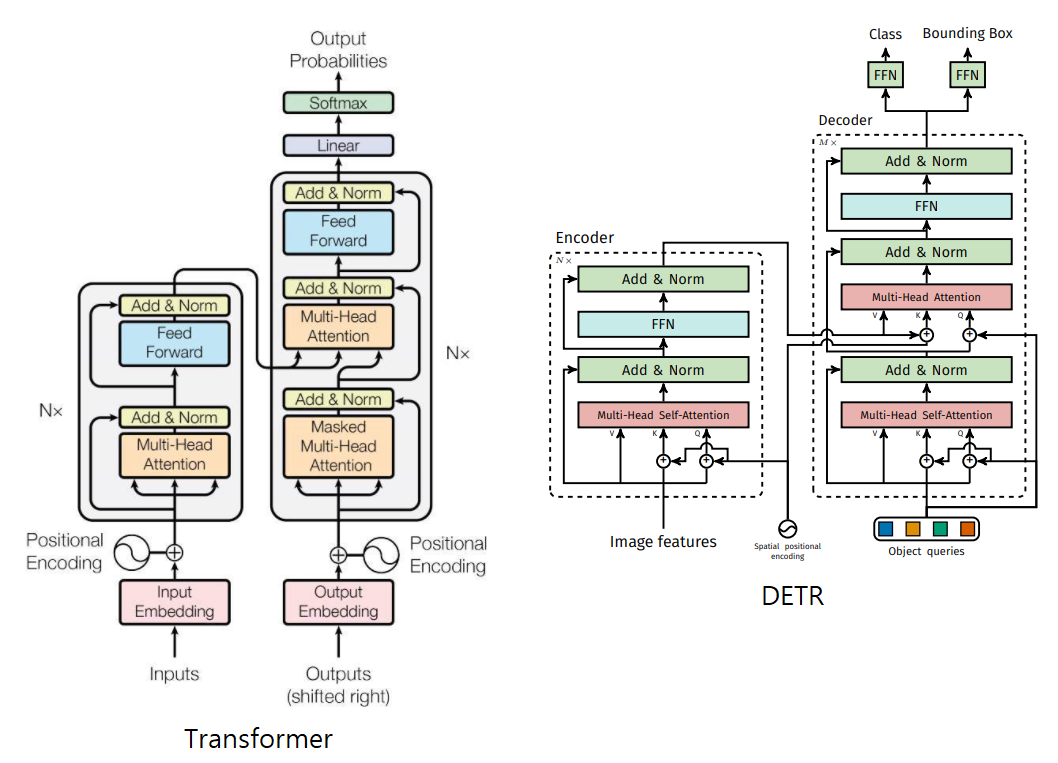
1.Abstract ✔ bipartite matching(이분매칭): direct set prediction problem, 원래 의미는 A집단이 B집단을 선택할때 효과적으로 매칭시켜준다는 점에서 ‘최대 매칭(Max Matching)’ 을 의미, detr에서는 gr
2022년 3월 5일