📢 YOLO v8 모델을 활용하여 주먹, 가위, 보 객체 탐지
개념
- YOLO 계열의 모델은 실시간 객체 탐지 작업에 용이
- 8 버전은 6에 비해 성능이 좋아짐
- ultralytics 회사에서 제공하는 라이브러리로, 코드와 사용법이 직관적이고 문서화가 잘 되어 있음
- YOLOv8: 높은 정확도와 유연한 탐지 방법을 가지고 있어 사용자 친화적인 인터페이스 가짐
Code
설치
- Utralytics 울트라리틱스 → YOLO 를 사용하기 위한 패키지
!pip -q install ultralytics데이터 다운로드
https://universe.roboflow.com/project-kzetv/yolov7_rock_paper_scissors/dataset/1
-
Download Dataset클릭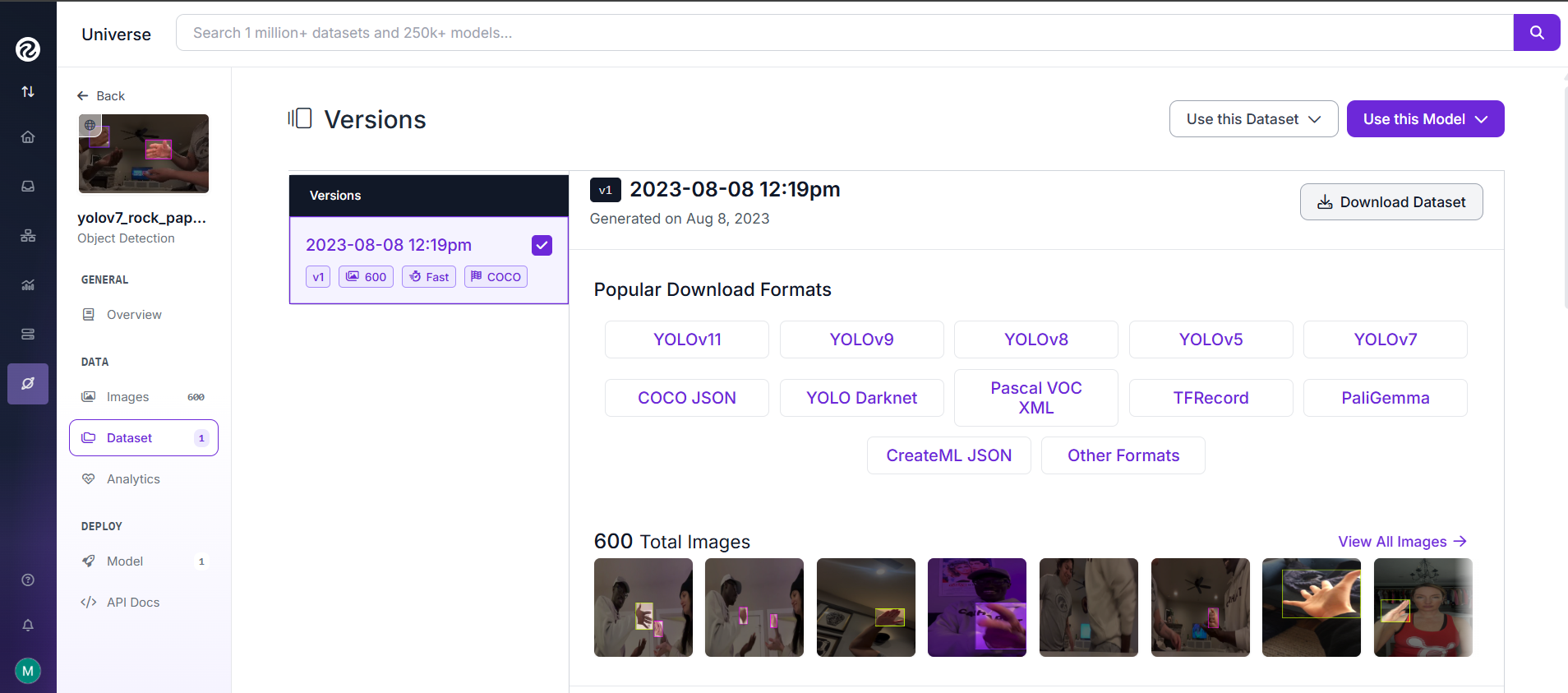
-
3번째
Download Dataset클릭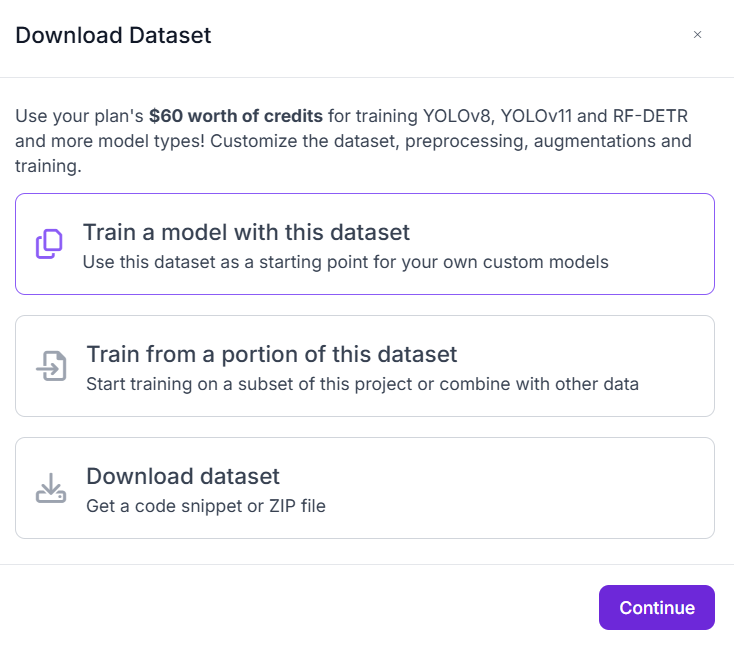
-
모델 선택 >
continue클릭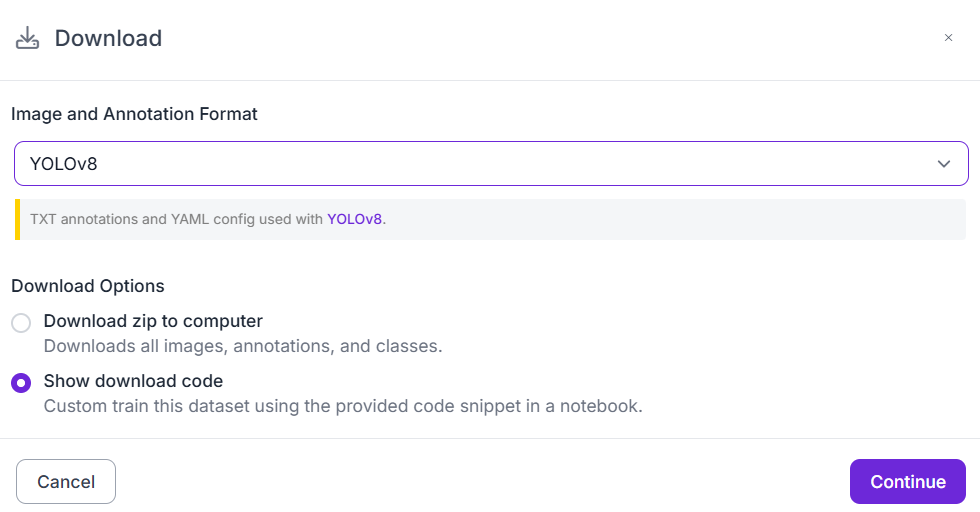
-
code 복사

!pip install roboflow from roboflow import Roboflow rf = Roboflow(api_key="mvueo9gbNXGpc80f1UFu") project = rf.workspace("project-kzetv").project("yolov7_rock_paper_scissors") version = project.version(1) dataset = version.download("yolov8") -
data.yaml파일 수정- 경로 수정 (test, train, val 부분 → 절대 경로로 변경)
학습
-
import library
- v8 부터는 라이브러리 사용하듯이 사용 가능
from ultralytics import YOLO -
모델 객체 생성
# 모델 객체 생성 # 사전 학습된 모델 사용 -> 전이학습 model = YOLO('yolov8n.pt')model = YOLO()- 사전학습이 되지 않은 기본 뼈대 모델을 불러오는 방법
- 사전 학습된 모델 사용하려면, 즉 전이학습하려면, 모델 이름 작성해주면 됨
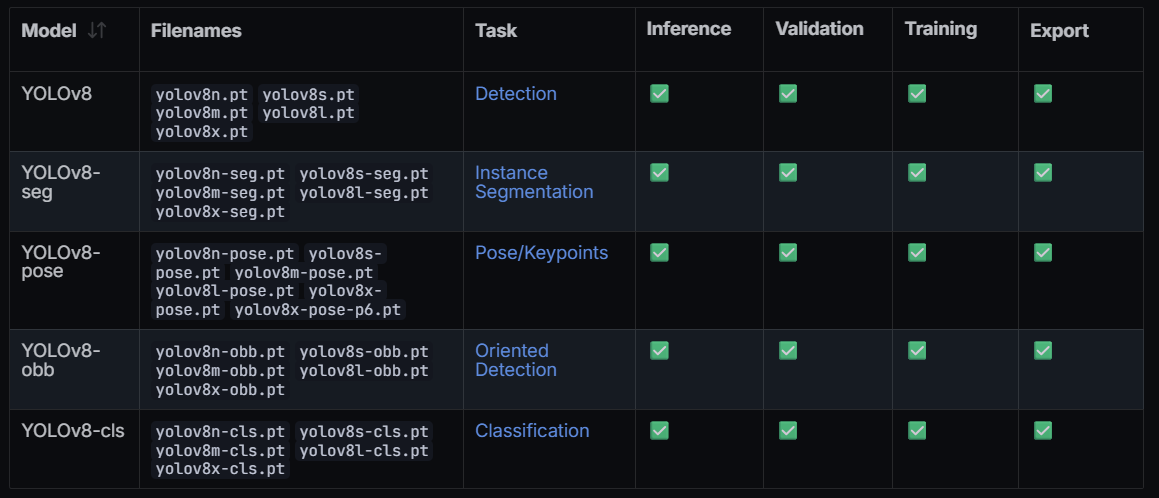
모델 선택 방법
- https://docs.ultralytics.com/models/yolov8/#supported-tasks-and-modes
- 나의 task 에 맞는 모델 선택
-
모델 학습
- 학습 키워드 사용하여 학습 (train)
# 모델 학습 result = model.train(data = './yolov7_rock_paper_scissors-1/data.yaml', epochs = 100, imgsz = 640)- std
... Epoch GPU_mem box_loss cls_loss dfl_loss Instances Size 99/100 2.62G 0.4481 0.334 0.882 14 640: 100% ━━━━━━━━━━━━ 19/19 3.4it/s 5.6s Class Images Instances Box(P R mAP50 mAP50-95): 100% ━━━━━━━━━━━━ 2/2 4.2it/s 0.5s all 63 73 0.906 0.965 0.965 0.81 Epoch GPU_mem box_loss cls_loss dfl_loss Instances Size 100/100 2.62G 0.4458 0.3325 0.8807 15 640: 100% ━━━━━━━━━━━━ 19/19 4.7it/s 4.1s Class Images Instances Box(P R mAP50 mAP50-95): 100% ━━━━━━━━━━━━ 2/2 2.9it/s 0.7s all 63 73 0.898 0.973 0.964 0.807 100 epochs completed in 0.188 hours. ...
모델 학습 결과
runs/detect/train./weightbest.pt: 성능 가장 좋음last.pt: 가장 마지막
예측
-
베스트 모델 불러오기
# runs/detect/train2/weights/best.pt 베스트 모델 불러오기 my_model = YOLO('./runs/detect/train2/weights/best.pt') -
예측에 사용할 이미지 한 장으로 예측해보기
# 예측에 사용할 이미지 한 장 가져오기 source = './yolov7_rock_paper_scissors-1/test/images/IMG_5636_MOV-40_jpg.rf.451d107b173a6856044a5d884eb7ed90.jpg' # 예측 결과를 저장할 경로 save_dir = './runs/detect/predict' # 예측 my_model(source = source, save_dir = save_dir, save = True, conf = 0.3)conf- 신뢰도 cut-off
0.3: 30% 이상의 신뢰도를 가질 경우 표시

-
결과 확인
result_img = my_model(source = source, save_dir = save_dir, save = True, conf = 0.3) import matplotlib.pyplot as plt plt.imshow(result_img[0].plot()) plt.axis('off')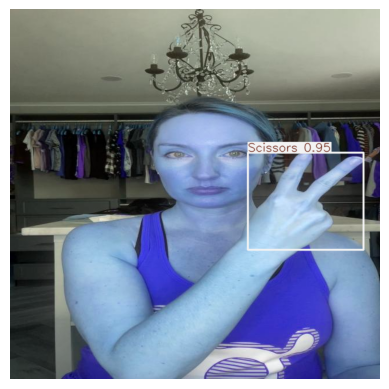
- (참고) matplotlib 으로 그렸을 때 파란색으로 보이는 이유
numpy 와 matplotlib 이 사용하는 컬러 채널 순서가 다름
그래서 지금 red 와 blue 가 바뀌어서 저렇게 보임!
- (참고) matplotlib 으로 그렸을 때 파란색으로 보이는 이유
