2023.10.27
Today's agenda
- template matching
- pararrel in opencv
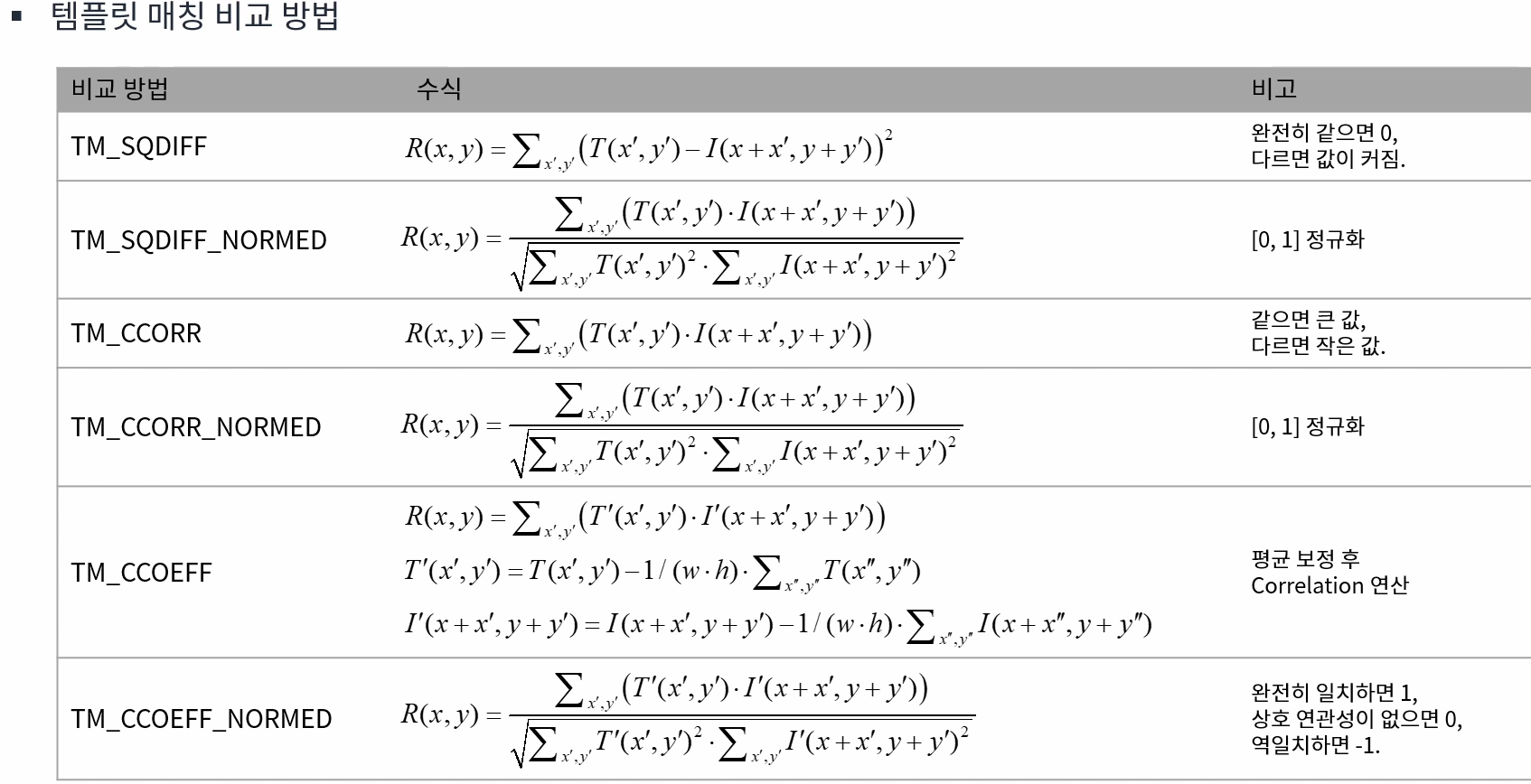
1. template matching
find part from source image to template image
void matchTemplate(InputArray image, InputArray templ, OutputArray result, int method, InputArray mask = noArray());
parameters
- image : input image(CV_8UC1 or CV_32F1)
- templ : template image
- result : CV_32F1 matrix
- method :

- mask : mask image
#include <iostream>
#include "opencv2/opencv.hpp"
using namespace std;
using namespace cv;
int main()
{
Mat src = imread("circuit.bmp", IMREAD_GRAYSCALE);
Mat tmpl = imread("crystal.bmp", IMREAD_GRAYSCALE);
#if 0
src = imread("wheres_wally.jpg", IMREAD_GRAYSCALE); // IMREAD_COLOR
tmpl = imread("wally.bmp", IMREAD_GRAYSCALE);
#endif
if (src.empty() || tmpl.empty()) {
cerr << "Image load failed!" << endl;
return -1;
}
#if 1
src = src + 50;
Mat noise(src.size(), CV_32S);
randn(noise, 0, 10); // 10, 50, 100
add(src, noise, src, noArray(), CV_8U);
#endif
#if 1
GaussianBlur(src, src, Size(), 1);
GaussianBlur(tmpl, tmpl, Size(), 1);
#endif
#if 0
resize(src, src, Size(), 0.9, 0.9); // 0.8, 0.7
#endif
#if 0
Point2f cp(src.cols / 2.f, src.rows / 2.f);
Mat rot = getRotationMatrix2D(cp, 10, 1); // 20, 30
warpAffine(src, src, rot, src.size());
#endif
Mat res, res_norm;
matchTemplate(src, tmpl, res, TM_CCOEFF_NORMED);
normalize(res, res_norm, 0, 255, NORM_MINMAX, CV_8U);
double maxv;
Point maxloc;
minMaxLoc(res, 0, &maxv, 0, &maxloc);
cout << "maxv: " << maxv << endl;
cout << "maxloc: " << maxloc << endl;
Mat dst;
cvtColor(src, dst, COLOR_GRAY2BGR);
rectangle(dst, Rect(maxloc.x, maxloc.y, tmpl.cols, tmpl.rows), Scalar(0, 0, 255), 2);
// imshow("src", src);
imshow("tmpl", tmpl);
imshow("res_norm", res_norm);
imshow("dst", dst);
waitKey();
}if more than 1 template is exist in source image
matchTemplate(src, tmpl, res, TM_CCOEFF_NORMED); normalize(res, res_norm, 0, 255, NORM_MINMAX, CV_8UC1);
2. pararrel in opencv
supported pararrel method in opencv
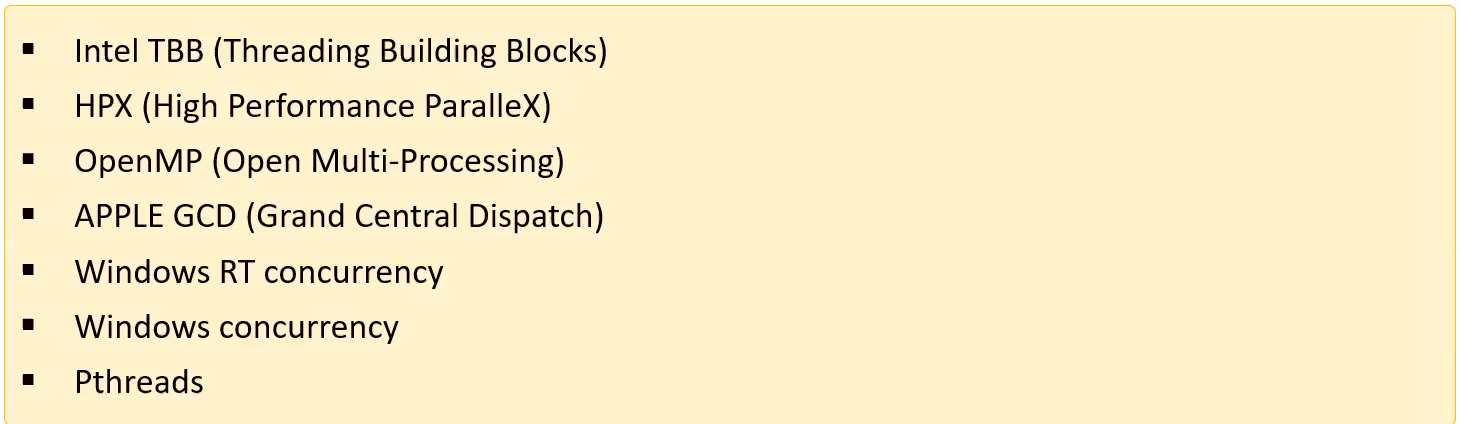
void pararrel_for_(const Range& range, const PararrelLoopBody& body, double nstripes = -1.); void pararrel_for_(const Range& range, std::function<void(const Range&)> function, double nstripes = -1.);
parameters
- range : ranged for pararrel processing
- body : function body(lambda expression in modern c++)
