2023.10.30
Today's agenda
1. geometry transformation of image
2. combination of rotation tranform and scale transform
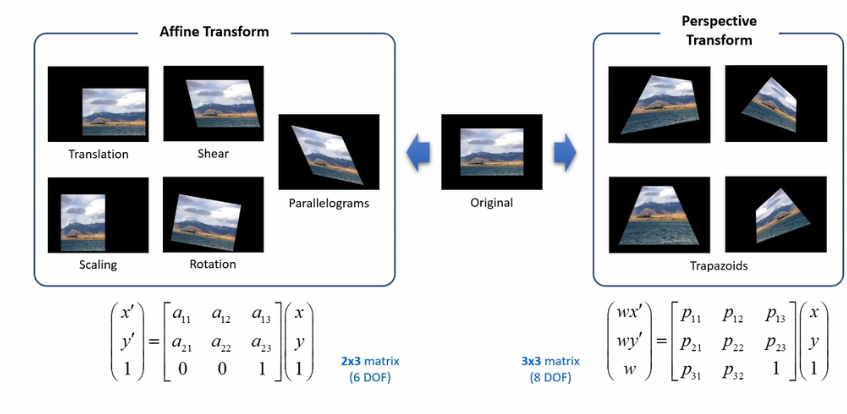
3. affine transform and perspective transform
1. geometry transformation of image
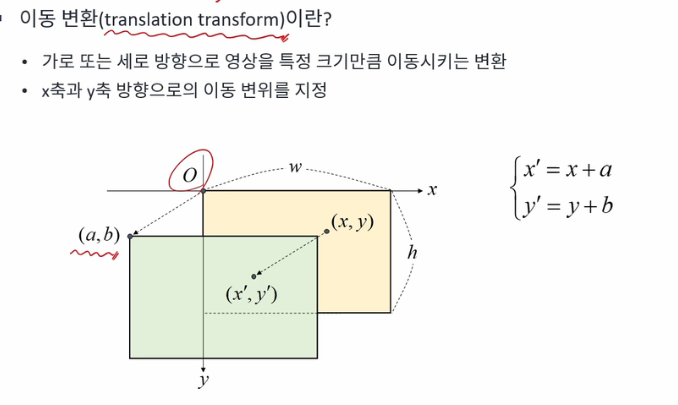
geometry transformation
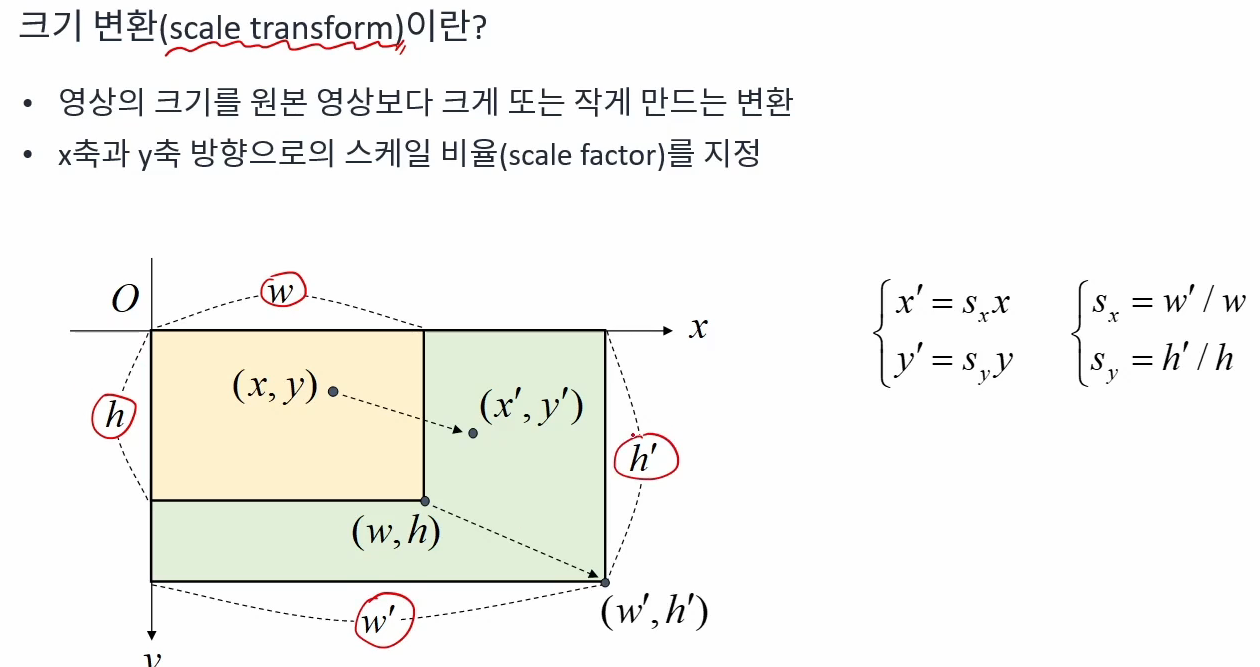
scale transformation
#include <iostream>
#include "opencv2/opencv.hpp"
using namespace std;
using namespace cv;
void resize1();
void resize2();
void resize3();
void resize4();
int main()
{
resize1();
resize2();
resize3();
resize4();
}
void resize1()
{
Mat src = imread("camera.bmp", IMREAD_GRAYSCALE);
if (src.empty()) {
cerr << "Image load failed!" << endl;
return;
}
Mat dst = Mat::zeros(src.rows * 2, src.cols * 2, CV_8UC1);
for (int y = 0; y < src.rows; y++) {
for (int x = 0; x < src.cols; x++) {
int x_ = x * 2;
int y_ = y * 2;
dst.at<uchar>(y_, x_) = src.at<uchar>(y, x);
}
}
imshow("src", src);
imshow("dst", dst);
waitKey();
}
void resize2()
{
Mat src = imread("camera.bmp", IMREAD_GRAYSCALE);
if (src.empty()) {
cerr << "Image load failed!" << endl;
return;
}
Mat dst = Mat::zeros(src.rows * 2, src.cols * 2, src.type());
for (int y_ = 0; y_ < dst.rows; y_++) {
for (int x_ = 0; x_ < dst.cols; x_++) {
int x = x_ / 2;
int y = y_ / 2;
dst.at<uchar>(y_, x_) = src.at<uchar>(y, x);
}
}
imshow("src", src);
imshow("dst", dst);
waitKey();
}
void resizeBilinear(const Mat& src, Mat& dst, Size size)
{
dst.create(size.height, size.width, CV_8U);
int x1, y1, x2, y2; double rx, ry, p, q, value;
double sx = static_cast<double>(src.cols - 1) / (dst.cols - 1);
double sy = static_cast<double>(src.rows - 1) / (dst.rows - 1);
for (int y = 0; y < dst.rows; y++) {
for (int x = 0; x < dst.cols; x++) {
rx = sx * x; ry = sy * y;
x1 = cvFloor(rx); y1 = cvFloor(ry);
x2 = x1 + 1; if (x2 == src.cols) x2 = src.cols - 1;
y2 = y1 + 1; if (y2 == src.rows) y2 = src.rows - 1;
p = rx - x1; q = ry - y1;
value = (1. - p) * (1. - q) * src.at<uchar>(y1, x1)
+ p * (1. - q) * src.at<uchar>(y1, x2)
+ (1. - p) * q * src.at<uchar>(y2, x1)
+ p * q * src.at<uchar>(y2, x2);
dst.at<uchar>(y, x) = static_cast<uchar>(value + .5);
}
}
}
void resize3()
{
Mat src = imread("camera.bmp", IMREAD_GRAYSCALE);
if (src.empty()) {
cerr << "Image load failed!" << endl;
return;
}
Mat dst;
resizeBilinear(src, dst, Size(600, 300));
imshow("src", src);
imshow("dst", dst);
waitKey();
}
void resize4()
{
Mat src = imread("rose.bmp");
if (src.empty()) {
cerr << "Image load failed!" << endl;
return;
}
Mat dst1, dst2, dst3, dst4;
resize(src, dst1, Size(), 4, 4, INTER_NEAREST);
resize(src, dst2, Size(1920, 1280));
resize(src, dst3, Size(1920, 1280), 0, 0, INTER_CUBIC);
resize(src, dst4, Size(1920, 1280), 0, 0, INTER_LANCZOS4);
imshow("src", src);
imshow("dst1", dst1(Rect(400, 500, 400, 400)));
imshow("dst2", dst2(Rect(400, 500, 400, 400)));
imshow("dst3", dst3(Rect(400, 500, 400, 400)));
imshow("dst4", dst4(Rect(400, 500, 400, 400)));
waitKey();
}
2. combination of rotation tranform and scale transform
Mat getRotationMatrix2D(Point2F center, double angle, double scale);
parameters
- center : central point for rotation
- angle : rotation degree
- scale : resize ratio after rotation
return value
- 2x3 double CV_64F matrix
void warpAffine(InputArray src, OutputArray dst, InputArray M, Size dsize, int flags = INTER_LINEAR, int borderMode = BORDER_CONSTANT, const Scalar& borderValue = Scalar());
parameters
- src : source image
- dst : destination image
- M : 2x3 affine matrix(CV_32F or CV_64F)
- dsize : size of destination image
3. affine transform and perspective transform
Mat getAffineTransform(const Point2F src[], const POint2F dst[]); Mat getAffineTransform(InputArray src, InputArray src);
parameters
- src : 3 of original point value(Point2F src[3] or vector src)
- dst : 3 of destination point value(Point2F dst[3] or vector dst)
return value
- 2x3 matrix(CV_64F)
Mat getPerspectiveTransform(const Point2F src[], const Point2F dst[], int solveMethod = DECOMP_LU); Mat getPerspectiveTransform(InputArray src, InputArray dst, int solveMethod = DECOMP_LU);
parameters
- src : 4 of original point value(Point2F src[4] or vector src)
- src : 4 of destination point value(Point2F dst[4] or vector dst)
return value
- 3x3 matrix(CV_64F)
bird's eye view
Around view in our car infortainment system, fish eye image transform to normal image
#include <iostream>
#include "opencv2/opencv.hpp"
using namespace std;
using namespace cv;
int main()
{
VideoCapture cap("../../data/test_video.mp4");
if (!cap.isOpened()) {
cerr << "Video open failed!" << endl;
return -1;
}
Mat src;
while (true) {
cap >> src;
if (src.empty())
break;
int w = 500, h = 260;
vector<Point2f> src_pts(4);
vector<Point2f> dst_pts(4);
src_pts[0] = Point2f(474, 400); src_pts[1] = Point2f(710, 400);
src_pts[2] = Point2f(866, 530); src_pts[3] = Point2f(366, 530);
dst_pts[0] = Point2f(0, 0); dst_pts[1] = Point2f(w - 1, 0);
dst_pts[2] = Point2f(w - 1, h - 1); dst_pts[3] = Point2f(0, h - 1);
Mat per_mat = getPerspectiveTransform(src_pts, dst_pts);
Mat dst;
warpPerspective(src, dst, per_mat, Size(w, h));
#if 1
vector<Point> pts;
for (auto pt : src_pts) {
pts.push_back(Point(pt.x, pt.y));
}
polylines(src, pts, true, Scalar(0, 0, 255), 2, LINE_AA);
#endif
imshow("src", src);
imshow("dst", dst);
if (waitKey(10) == 27)
break;
}
}
