(Jetson Project#10)Implementing Obstacle Avoidance
Developing Self Driving with Jetson Nano
목록 보기
21/33
With motor control established, Now implement obstacle avoidance by subscribing to the LIDAR's "/scan" topic and publishing motor commands based on detected obstacles.
5.1. Creating the Obstacle Avoidance Node
- Navigate to the motor_control Package's Scripts Directory:
cd ~/catkin_ws/src/motor_control/scripts- Create the obstacle_avoidance_node.py Script:
nano obstacle_avoidance_node.py
- Add the Following Content:
#!/usr/bin/env python3
import rospy
from sensor_msgs.msg import LaserScan
from std_msgs.msg import String
class ObstacleAvoidanceNode:
def __init__(self):
rospy.init_node('obstacle_avoidance_node', anonymous=True)
# Parameters
self.obstacle_distance = rospy.get_param('~obstacle_distance', 0.5) # meters
self.scan_topic = rospy.get_param('~scan_topic', '/scan')
self.command_topic = rospy.get_param('~command_topic', '/motor_command')
# Publisher to motor_command
self.motor_pub = rospy.Publisher(self.command_topic, String, queue_size=10)
# Subscriber to LaserScan
rospy.Subscriber(self.scan_topic, LaserScan, self.scan_callback)
# State
self.obstacle_detected = False
def scan_callback(self, scan_data):
# Find the minimum distance in the front sector
front_angles = range(-30, 31) # +/-30 degrees
front_indices = [i for i, angle in enumerate(scan_data.angle_min + i*scan_data.angle_increment for i in range(len(scan_data.ranges))) if -0.5235987755982988 <= angle <= 0.5235987755982988] # -30 to +30 degrees in radians
# Get minimum distance in the front sector
min_distance = min([scan_data.ranges[i] for i in front_indices if not rospy.is_shutdown() and not rospy.is_num(scan_data.ranges[i]) and scan_data.ranges[i] > 0], default=float('inf'))
rospy.loginfo(f"Minimum distance in front: {min_distance:.2f} meters")
if min_distance < self.obstacle_distance:
if not self.obstacle_detected:
rospy.logwarn("Obstacle detected! Stopping.")
self.motor_pub.publish('S')
self.obstacle_detected = True
else:
if self.obstacle_detected:
rospy.loginfo("Path clear. Moving forward.")
self.motor_pub.publish('F')
self.obstacle_detected = False
def run(self):
rospy.spin()
if __name__ == '__main__':
try:
node = ObstacleAvoidanceNode()
node.run()
except rospy.ROSInterruptException:
pass
Explanation of the Script:
Parameters:
obstacle_distance: Threshold distance to detect obstacles.
scan_topic: Topic to subscribe for LIDAR data.
command_topic: Topic to publish motor commands.
Functionality:
Subscribes to the LIDAR's /scan topic.
Monitors the minimum distance in the front sector (e.g., +/-30 degrees).
If an obstacle is detected within obstacle_distance, publishes a stop command (S).
If the path is clear, publishes a forward command (F).
- Make the Script Executable:
chmod +x obstacle_avoidance_node.py
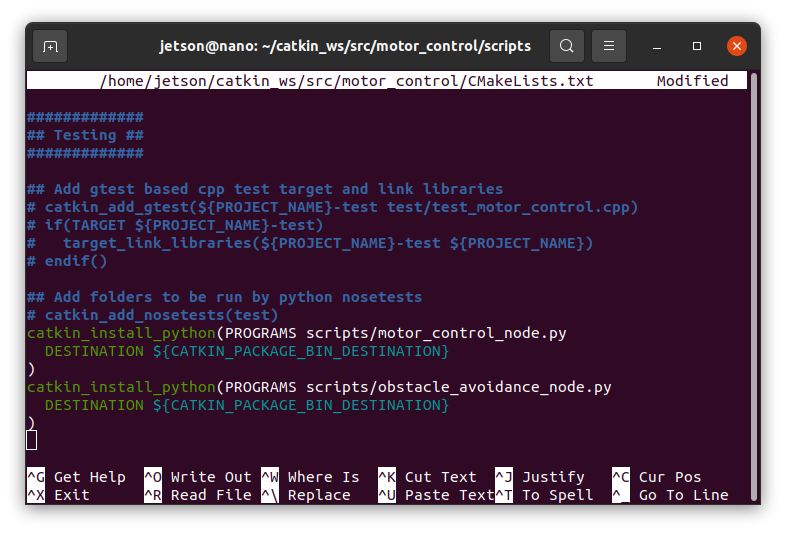
5.1.1. Update CMakeLists.txt for the New Script
- Edit CMakeLists.txt:
nano ~/catkin_ws/src/motor_control/CMakeLists.txt- Add the Following Lines:
catkin_install_python(PROGRAMS scripts/obstacle_avoidance_node.py
DESTINATION ${CATKIN_PACKAGE_BIN_DESTINATION}
)
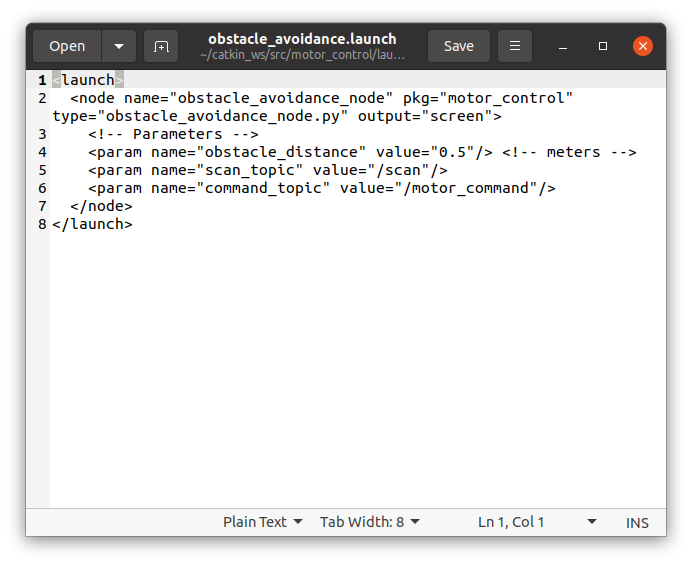
5.1.2. Create a Launch File for Obstacle Avoidance
- Navigate to the Launch Directory:
mkdir -p ~/catkin_ws/src/motor_control/launch
cd ~/catkin_ws/src/motor_control/launch- Create the obstacle_avoidance.launch File:
nano obstacle_avoidance.launch- Add the Following Content:
<launch>
<node name="obstacle_avoidance_node" pkg="motor_control" type="obstacle_avoidance_node.py" output="screen">
<!-- Parameters -->
<param name="obstacle_distance" value="0.5"/> <!-- meters -->
<param name="scan_topic" value="/scan"/>
<param name="command_topic" value="/motor_command"/>
</node>
</launch>
5.1.3. Build the ROS Package
- Navigate to Your Catkin Workspace:
cd ~/catkin_ws
- Build the Workspace:
catkin_make- Source the Workspace:
source devel/setup.bash5.1.4. Launch the Obstacle Avoidance Node
- Run the Launch File:
roslaunch motor_control obstacle_avoidance.launch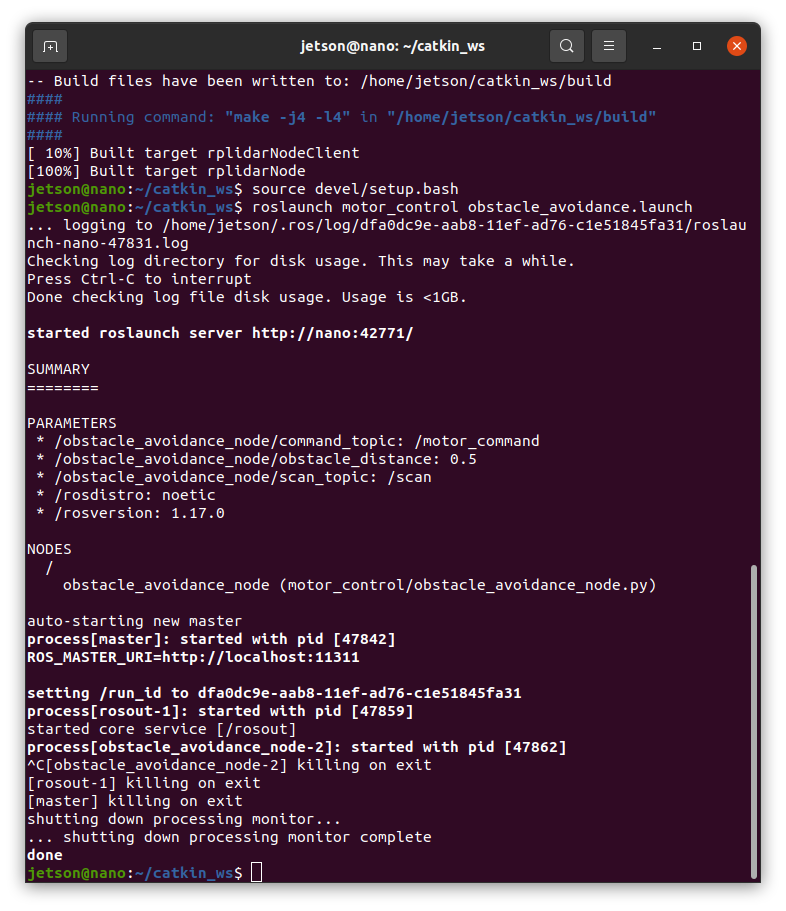
- Verify Functionality:
- Move obstacles in front of the robot and observe if it stops (S command).
- Remove obstacles and check if the robot resumes moving forward (F command).

..