1. WSL2 및 Ubuntu 20.04 설치
- WSL(Windows Subsystem for Linux) 기능 활성화
- Windows 검색창에서 “Windows 기능 켜기/끄기”를 검색하고 실행
- “Windows 하위 시스템용 Linux”에 체크 후 확인 누른 뒤 재부팅
- WSL2 업데이트 및 기본 설정
- Microsoft 공식 문서 를 참고하여, WSL2용 Linux 커널을 설치 혹은 업데이트
- PowerShell(관리자 권한)에서 다음 명령어 실행하여 WSL의 기본 버전을 WSL2로 설정
wsl --set-default-version 2- Microsoft 스토어에서 Ubuntu 20.04 설치
- 스토어 앱 실행 → “Ubuntu 20.04 LTS” 검색 후 설치
- 설치 완료 후 실행하면 초기 사용자 이름, 비밀번호 등을 설정
2. 패키지 업데이트 및 필수 도구 설치
# 시스템 패키지 목록 업데이트
sudo apt update
# 패키지 업그레이드(권장)
sudo apt upgrade -y
# curl 설치(ROS key 추가 시 필요)
sudo apt install curl -y
3. ROS Noetic 저장소 추가 및 키(key) 등록
- ROS 패키지용 GPG 키 추가
curl -s https://raw.githubusercontent.com/ros/rosdistro/master/ros.asc | sudo apt-key add -
- ROS Noetic 소스 리스트 추가
# focal은 Ubuntu 20.04의 코드명
echo "deb http://packages.ros.org/ros/ubuntu focal main" | sudo tee /etc/apt/sources.list.d/ros-noetic.list
- 패키지 목록 업데이트
sudo apt update
4. ROS Noetic 설치
- 전체 패키지(Desktop Full) 설치
ROS의 모든 기능(시뮬레이션, RViz, rqt 등)을 사용하고 싶다면 아래 명령어로 설치.
sudo apt install ros-noetic-desktop-full -y
- ROS 환경 설정
ROS를 매번 사용할 때마다 환경 변수를 설정해 주어야 합니다. 이를 자동으로 실행하기 위해 ~/.bashrc 파일에 추가
# rosdep 초기화 및 업데이트
sudo apt install python3-rosdep
sudo rosdep init
rosdep update
# ROS 환경 변수 설정
echo "source /opt/ros/noetic/setup.bash" >> ~/.bashrc
source ~/.bashrc
- 빌드 관련 도구 설치
ROS 패키지 빌드 시 필요한 도구를 설치
sudo apt install python3-rosinstall python3-rosinstall-generator python3-wstool build-essential -y
5. GUI 프로그램 사용(X11 Forwarding 등)
WSL2에서 RViz, rqt 등 GUI 관련 기능을 사용하려면 X 서버를 윈도우 측에 설치 후 연결.
다양한 방법이 있으나 대표적으로 다음을 사용가능.
- VcXsrv, Xming 등 X 서버 설치(Windows)
- WSL2 Ubuntu 20.04 터미널에서 export DISPLAY 설정
- VcXsrv + GWSL 등 서드파티 툴 이용
아래와 같이 설정할 수 있음(예: VcXsrv 사용 시):
- Windows에 VcXsrv 설치 후 실행(네트워크 액세스 public/private 허용)
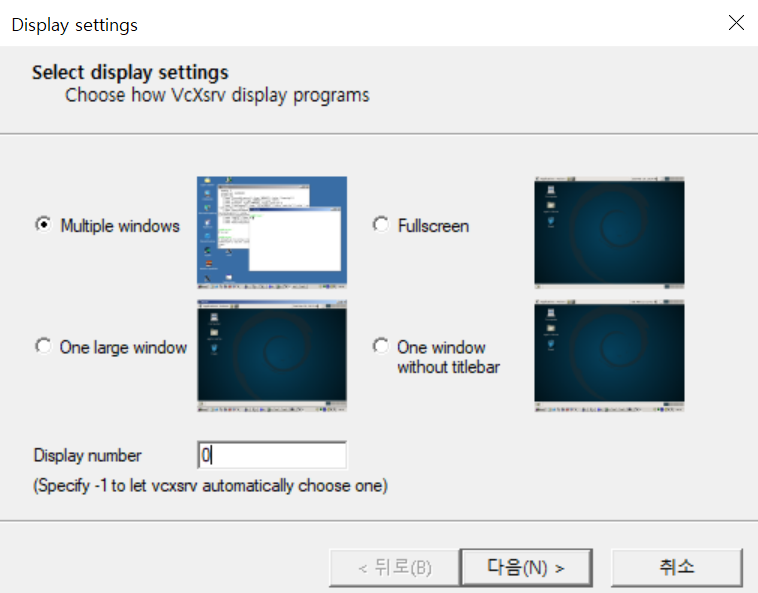
Multiple windows를 선택하고 Display number에 0을 입력.
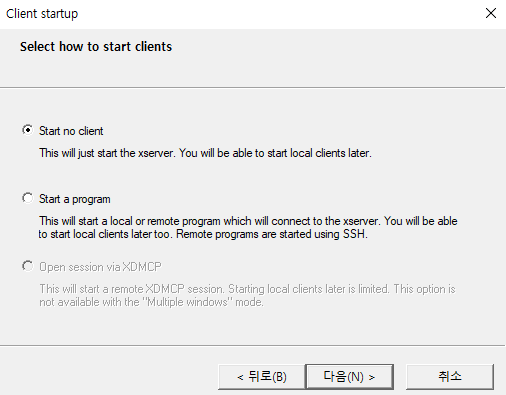
Start no client로 놓고 넘어감.
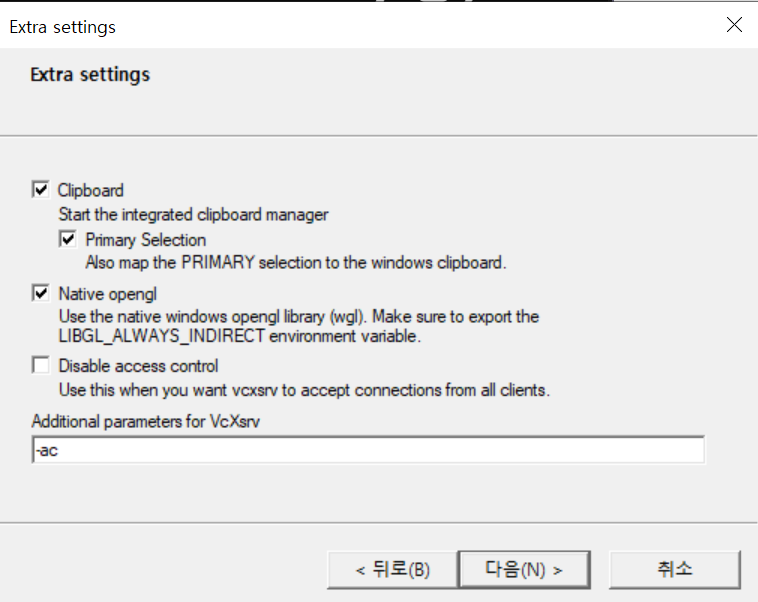
Additional parameters for Vcsrv에 '-ac'를 입력.
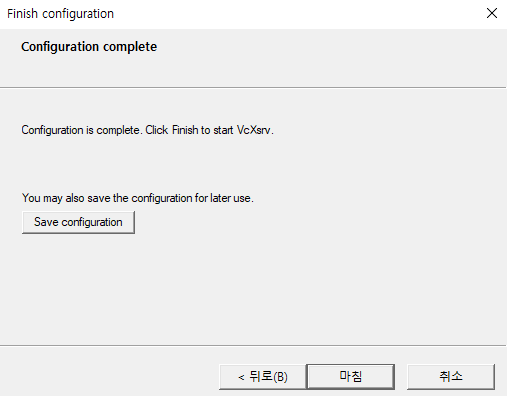
Save configuration을 누름.
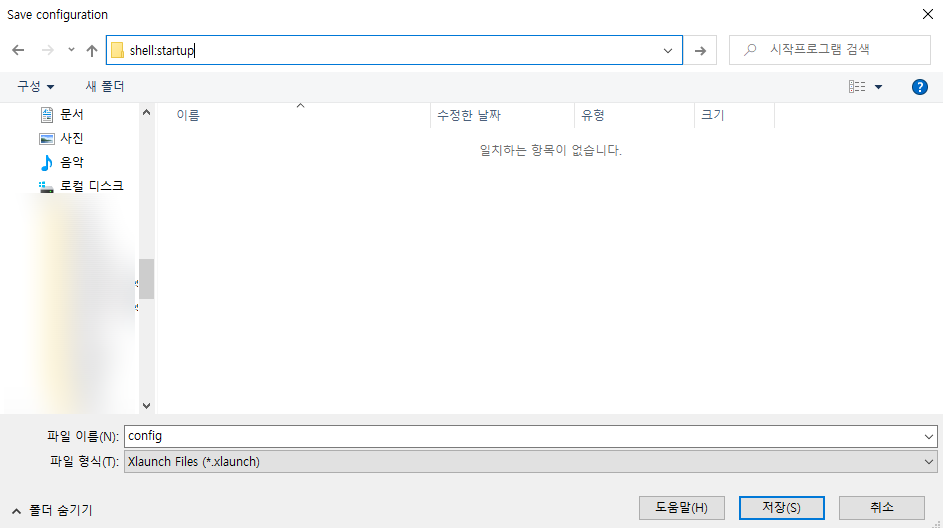
shell:startup을 입력하고 해당 디렉터리로 이동한 후 저장
마침을 눌러 설정
- Ubuntu 내에서 설정(권장)
우분투 키고 아래 명령어 입력하여 bashrc 열기
sudo nano ~/.bashrcbashrc의 맨 아래줄에 아래 명령어 추가
export DISPLAY="`grep nameserver /etc/resolv.conf | sed 's/nameserver //'`:0" # 혹시 몰라서 이것도 bashrc에 집어넣기
export LIBGL_ALWAYS_INDIRECT=1 # 이것도bashrc를 다시 불러와서 적용하기
source ~/.bashrc
- Ubuntu에서 환경 변수 설정(혹시몰라서 추가)
echo "export DISPLAY=$(ip route | grep default | awk '{print $3}'):0.0" >> ~/.bashrc
echo "export LIBGL_ALWAYS_INDIRECT=1" >> ~/.bashrc
source ~/.bashrc
6. 설치확인
# ROS 버전 정보 확인
rosversion -d
# 또는
roscore
roscore가 제대로 실행되면 설치가 정상적으로 이루어졌음을 의미.
노트북 재시작하고 우분투 키고 아래 명령어로 GUI 실행되는지 테스트
rqt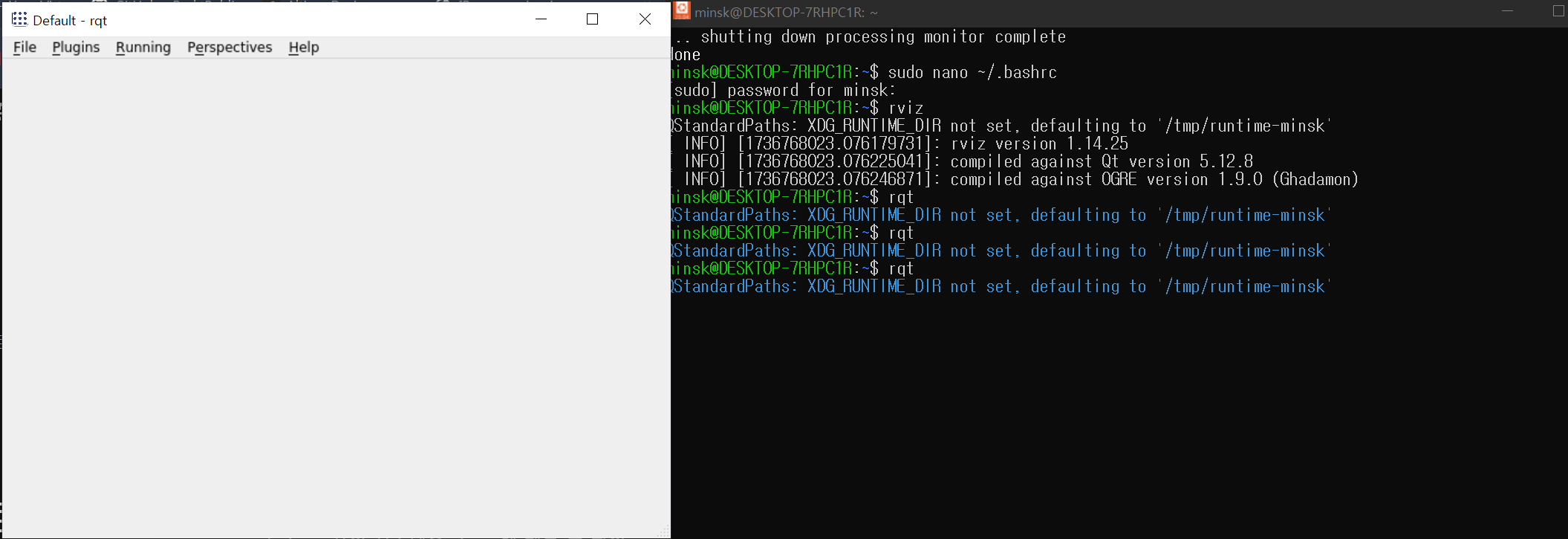
7. 우분투 종료
파워쉘에서 아래 명령어 입력
wsl --list --runningPS C:\WINDOWS\system32> wsl --list --running Linux용 Windows 하위 시스템 배포: Ubuntu(기본값) docker-desktop docker-desktop-data위와 같이 나옴
wsl --terminate Ubuntu아래 명령어 입력하면 꺼짐.

..