Ros2 Cartographer Setup(2)_custom serial communication node
Developing Self Driving with Jetson Nano

In order to develop the usb serial communication between ESP32 and Jetson Nano, I make custom Ros2 node.
Actually, I was going to make node from
" git clone https://github.com/ros-drivers/ros2_serial_example.git
"
But, it doesn't support now
So, I make the custom node.
Custom node's operations
- Send command to ESP32 to control motor motion
- Get data from ESP32 if necessary
command
1. Preparing Workspace
cd ~/ros2_ws/src2. Make new ROS2 package
ros2 pkg create --build-type ament_python serial_communication
3. Check "serial_node.py" location
cd ~/ros2_ws/src/serial_communication/serial_communication
lsMaybe in serial_communication file, empty or "init.py"
4. After check directory, make Python script
sudo nano ~/ros2_ws/src/serial_communication/serial_communication/serial_node.py
Write 'serial_node.py' code
#!/usr/bin/env python3
import rclpy
from rclpy.node import Node
import serial
from std_msgs.msg import String
class SerialCommunicationNode(Node):
def __init__(self):
super().__init__('serial_communication_node')
# serial port edit
self.serial_port = '/dev/ttyUSB1' #This port should be changed to real port number
self.baud_rate = 115200
# port open
try:
self.ser = serial.Serial(self.serial_port, self.baud_rate, timeout=1)
self.get_logger().info(f'Serial port {self.serial_port} opened at {self.baud_rate} baud.')
except serial.SerialException as e:
self.get_logger().error(f'Failed to open serial port: {e}')
exit(1)
# timer edit for reading data periodically
self.timer = self.create_timer(0.1, self.read_from_serial)
# Subscribe to Ros2 topics to receive motor control commands
self.subscription = self.create_subscription(
String,
'motor_commands',
self.write_to_serial,
10)
self.subscription # prevent unused variable warning
def read_from_serial(self):
if self.ser.in_waiting > 0:
data = self.ser.readline().decode('utf-8').rstrip()
self.get_logger().info(f'Received from ESP32: {data}')
# Data can be published as ROS2 topic if necessary
def write_to_serial(self, msg):
command = msg.data + '\n'
self.ser.write(command.encode('utf-8'))
self.get_logger().info(f'Sent to ESP32: {msg.data}')
def main(args=None):
rclpy.init(args=args)
node = SerialCommunicationNode()
rclpy.spin(node)
node.destroy_node()
rclpy.shutdown()
if __name__ == '__main__':
main()
After wirte code, Give Authority
chmod +x ~/ros2_ws/src/serial_communication/serial_communication/serial_node.py
5. Edit setup.py
edit package file and add dependency, save launch file
sudo nano ~/ros2_ws/src/serial_communication/setup.py
setup.py code
from setuptools import setup
package_name = 'serial_communication'
setup(
name=package_name,
version='0.0.0',
packages=[package_name],
py_modules=[],
data_files=[
('share/ament_index/resource_index/packages',
['resource/' + package_name]),
('share/' + package_name, ['package.xml']),
],
install_requires=['setuptools', 'pyserial'],
zip_safe=True,
maintainer='mseokq23',
maintainer_email='minseok1270@gmail.com',
description='Serial communication node for ROS2',
license='Apache License 2.0',
tests_require=['pytest'],
entry_points={
'console_scripts': [
'serial_node = serial_communication.serial_node:main',
],
},
)
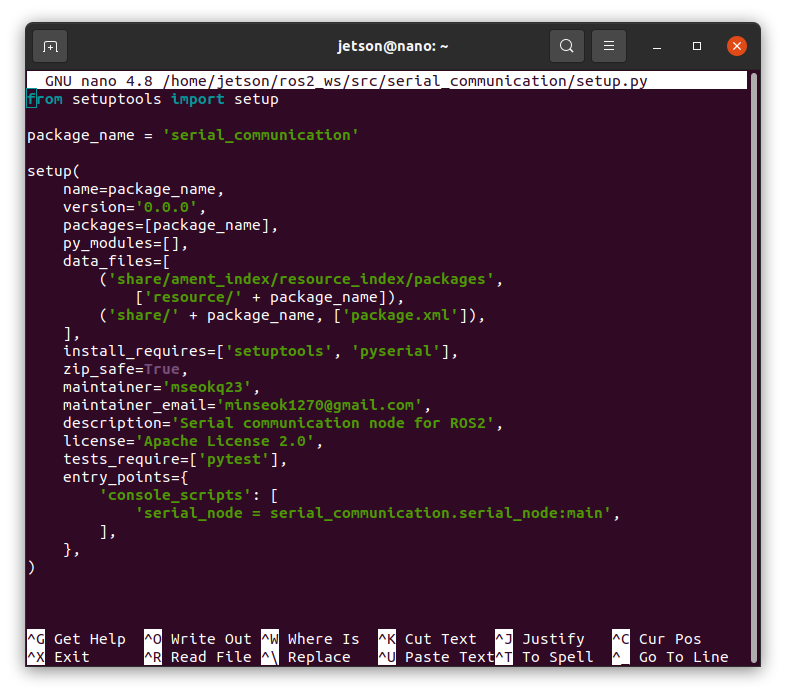
Add pyserial to "install_requires"
edit entry_points to launch "serial_communication.serial_node:main"
6. Edit package.xml
modify files to specify dependencies
move to package.xml location
cd ~/ros2_ws/src/serial_communication
ls
sudo nano package.xmlor
sudo nano ~/ros2_ws/src/serial_communication/package.xml
package.xml code
<?xml version="1.0"?>
<?xml-model href="http://download.ros.org/schema/package_format3.xsd" schematyp>
<package format="3">
<name>serial_communication</name>
<version>0.0.0</version>
<description>Custom serial communication node using PySerial</description>
<maintainer email="minseok1270@gmail.com">mseokq23</maintainer>
<license>Apache License 2.0</license>
<test_depend>ament_copyright</test_depend>
<test_depend>ament_flake8</test_depend>
<test_depend>ament_pep257</test_depend>
<test_depend>python3-pytest</test_depend>
<exec_depend>rclpy</exec_depend>
<exec_depend>std_msgs</exec_depend>
<exec_depend>pyserial</exec_depend>
<export>
<build_type>ament_python</build_type>
</export>
</package>
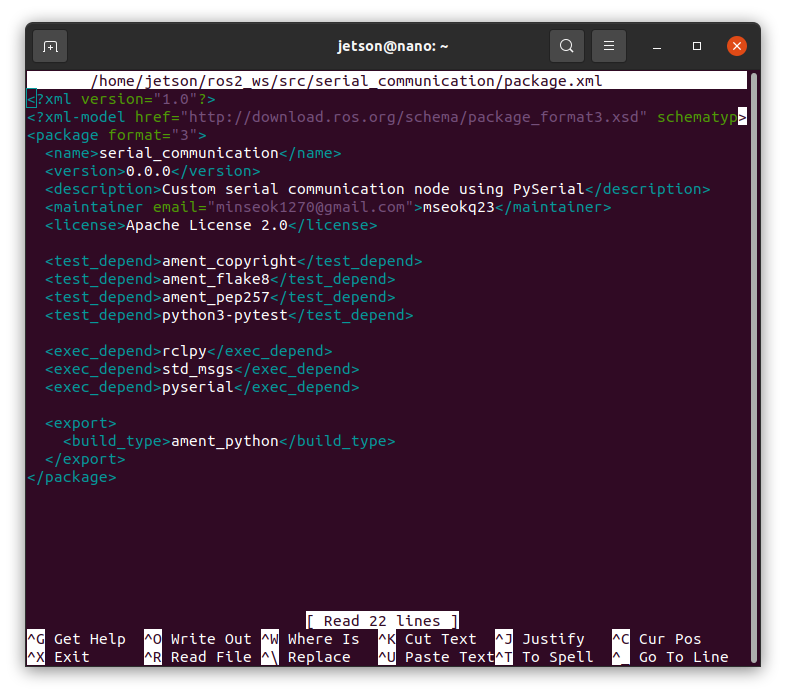
Add dependencies rclpy, std_msgs, pyserial
7. Package build in ROS2 workspace
cd ~/ros2_ws
colcon build --packages-select serial_communication
After Build, workspace sourcing
source install/setup.bashEasily, just close the existing terminal and open the new one

8. launch Node & Test
you need any esp32 board
Connect Jetson nano & ESP32 via USB cable
ros2 run serial_communication serial_node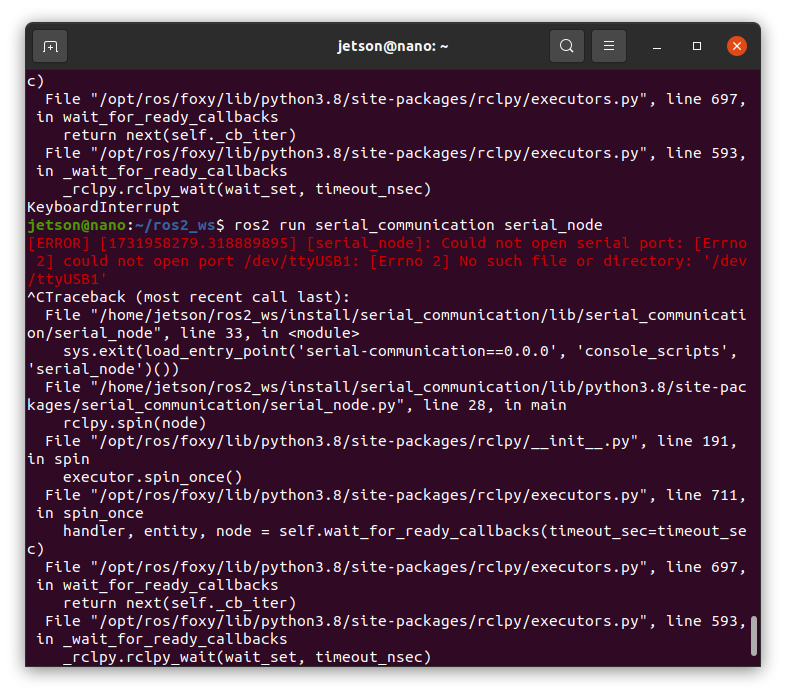
if you didn't connect esp32, error as shown
enable to serial port, add current user to "dialout" group
sudo usermod -a -G dialout $USERafter command this code, you should reboot for apply changes
esp32 code
void setup() {
Serial.begin(115200); // same Jetson Nano board rate}
void loop() {
if (Serial.available() > 0) {
String command = Serial.readStringUntil('\n');
Serial.println("Received: " + command);
// add motor control logic
if (command == "forward") {
// you should edit code about motor move forward for moving robot
} else if (command == "backward") {
// motor move back
}
// if need, you can edit any movement
}
}
for match jetson nano's board rate, 115200
Get command and move logic
