(Jetson Project#3)Setting Up ROS Noetic on Jetson Nano
Developing Self Driving with Jetson Nano
목록 보기
10/33
Add
sudo apt update
sudo apt install software-properties-common
sudo add-apt-repository universe
sudo sh -c 'echo "deb http://packages.ros.org/ros/ubuntu focal main" > /etc/apt/sources.list.d/ros-noetic.list'
sudo apt install curl
curl -s https://raw.githubusercontent.com/ros/rosdistro/master/ros.asc | sudo apt-key add -
sudo apt update
sudo apt install ros-noetic-desktop-full
sudo rosdep init
rosdep update
echo "source /opt/ros/noetic/setup.bash" >> ~/.bashrc
source ~/.bashrc
sudo apt install python3-rosinstall python3-rosinstall-generator python3-wstool build-essential
mkdir -p ~/catkin_ws/src
cd ~/catkin_ws/
catkin_make
echo "source ~/catkin_ws/devel/setup.bash" >> ~/.bashrc
source ~/.bashrc
echo $ROS_PACKAGE_PATH
1.1 Install ROS Noetic
First, make sure your Jetson Nano is running Ubuntu 20.04. Then, set up the ROS Noetic repository and install it.
Setup sources.list
sudo sh -c 'echo "deb http://packages.ros.org/ros/ubuntu focal main" > /etc/apt/sources.list.d/ros-noetic.list'Setup keys
sudo apt install curl
curl -s https://raw.githubusercontent.com/ros/rosdistro/master/ros.asc | sudo apt-key add -
Update package index
sudo apt updateInstall ROS Noetic Desktop Full
sudo apt install ros-noetic-desktop-full
Initialize rosdep
rosdep update *ㄴ> if you didn't "python3-rosdep" package is not installed
sudo rosdep init
rosdep update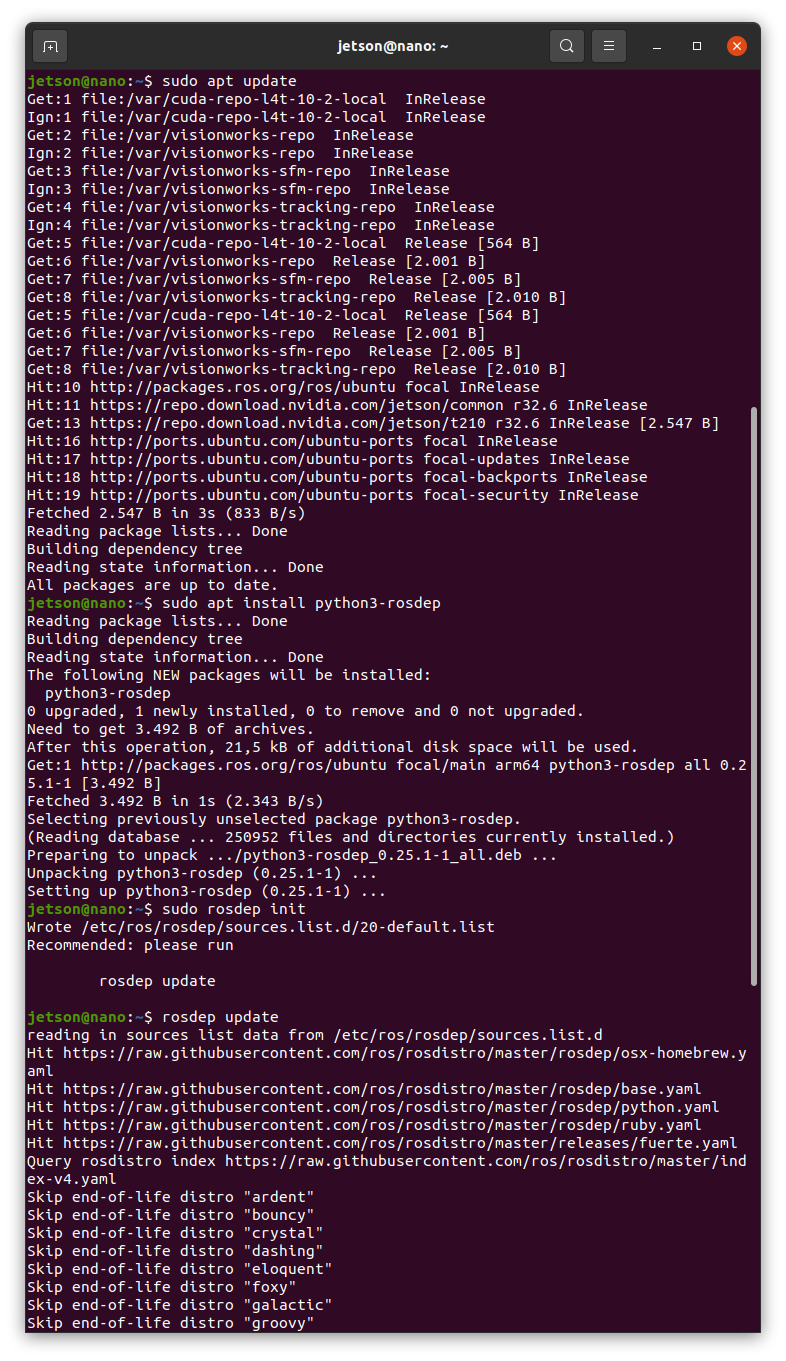
Setup environment
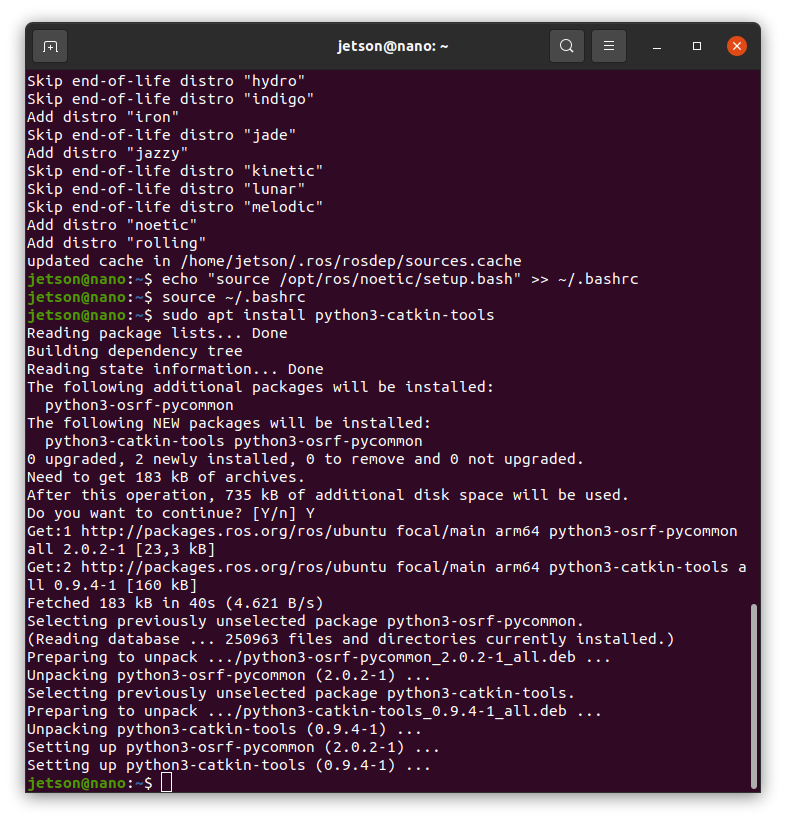
echo "source /opt/ros/noetic/setup.bash" >> ~/.bashrc
source ~/.bashrc1.2 Install Build Tools
Need catkin for building ROS packages.
sudo apt install python3-catkin-tools

..