Behavior Tree
FSM -> State Pattern -> BT based on Code -> BT based on Unity6 UI
보다 좋다 라기보다는, 케이스에 맞춰 잘 쓰는 것이 중요하다.
1. FSM 복습
기본 구조
switch (state)
{
case State.Idle:
// behavior
break;
case State.Move:
// behavior
break;
...
}(ex)
상태(State)3개일 때는?상태(State)10개 이상일 때는?
-> 상태(State) 수가 늘수록 코드 복잡도가 폭증
2. State Pattern 복습
기본 구조
- IState.cs (interface)
- IdleState
- MoveState
- JumpState
- ...
- StateMachine.cs
상태(State) 구성
- Idle, Move, Jump, Attack, Dash, Air관련, Crouch, Skill, Die, ...
- "
전이(transition) 연결"상태(State)가 많아질수록 간선의 수와 복잡도가 폭증.- 비슷한
상태(State)간 조건 중복이 많아짐. -> 유지보수 최악
- 비슷한
Q. 전이 연결 코드를 StateMachine 으로 옮긴다면?
A: 결국 Machine 의 코드가 복잡해짐.
3. Behavior Tree
Root Node -> Child Node 를 순서대로 조건부 판단 (매 프레임마다)
3-1. 구조
Node 들로 이루어져 있다.
public enum NodeState { Success, Failure, Running }
public abstract class Node
{
public abstract NodeState Evaluate();
}Evaluate() 를 통해 State 반환
3-2. Nodes
집중 할 것
- Selector (OR)
- Sequence (AND)
- Leaf (Condition/Action)
Node 종류
1. 복합 노드(Composite Node)
- 자식 노드들의 실행 흐름을 제어한다
시퀀스(Sequence); AND 과 비슷한 동작- 하나라도 실패하면 즉시 Failure 반환
셀렉터(Selector); OR- 하나라도 성공하면 즉시 Success 반환
- 병렬(Parallel); 자식 노드를 모두 실행한 뒤 결과를 반환한다. 반환 조건은 설정하기에 따라 다르다
2. Leaf Node
- 트리의 가장 하위 노드로 자식을 가지지 않는다
- 실제 행동을 수행(Action)하거나 조건(Condition)을 판단
3. 실습(BT 구조)
Enemy가 Player 추적 및 공격 구현
[Root]
|
[Selector] - OR
/ \
[Attack] [Chase] - Sequence(And 구조)
|
[IsNearPlayer] - Leaf(Condition)
|
[MoveToPlayer] - Leaf(Action)Selector (OR 구조)
AttackAction공격이 가능한가?- 가능하다면 공격 (Success / Failure)
- Failure: Chase(추적) ? (Success / Failure)
- Success: Target 추적
- Failure: IdleState
BT 구조 짤떄 Tip
- 통작할 흐름 모식도로 그려보기
- 노드들 이해하기 (Composite, Leaf Node)
- 코드 짜기
3-4. 장/단점
-
단점
- 코드가 복잡해짐
- Leaf 가 많아질 수록 전체적인 구조 파악이 어려움
- 디자이너(기획자) 수정 불편 (사실상 불가)
-
장점
- ChangeState 가 없음 => 전이가 느슨함
정리
| 정의 | 한계점 | |
|---|---|---|
| FSM | 상태를 정의하고 분기 | 코드가 복잡해짐 |
| State Pattern | 상태 책임 분리 | 전이 폭증 현상 |
| Behaviour Tree | 상태 조건 판별 트리 | 구조 파악 어려움. 협업 활용 못함 |
| BT Graph | BT 시각화(Low-Code) | 영어를 잘해야... |
실습
- Enemy
- 일정거리 안에 있으면 Player 추적 / 공격 범위 안에 있으면 공격
- 위 케이스가 아닌 경우 Patrol
개발
- 코드로 만든 Behavior Tree
// Tree 생성 부분
_rootNode = new Selector(new List<Node>
{
new Attack(attackRange, player, transform),
new Sequence(new List<Node>
{
new IsNearTarget(chaseRange, player, transform),
new MoveToTarget(speed, player, transform),
}),
new Patrol(transform, PatrolLeftPosition, PatrolRightPosition, speed),
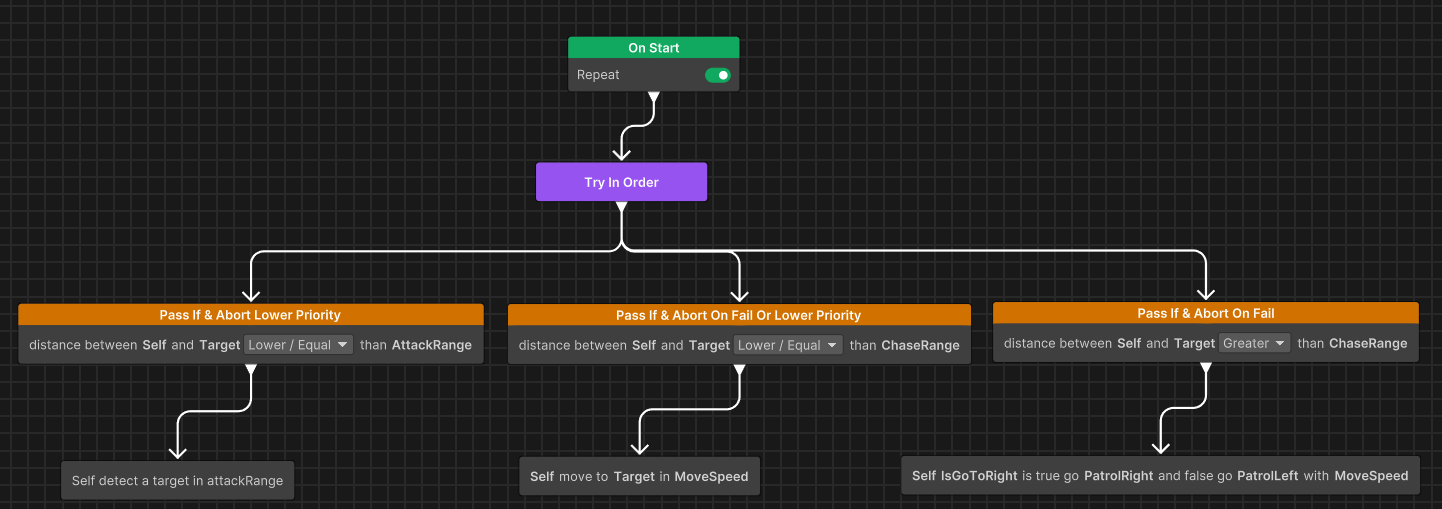
});- Behavior Tree Graph 까지 적용
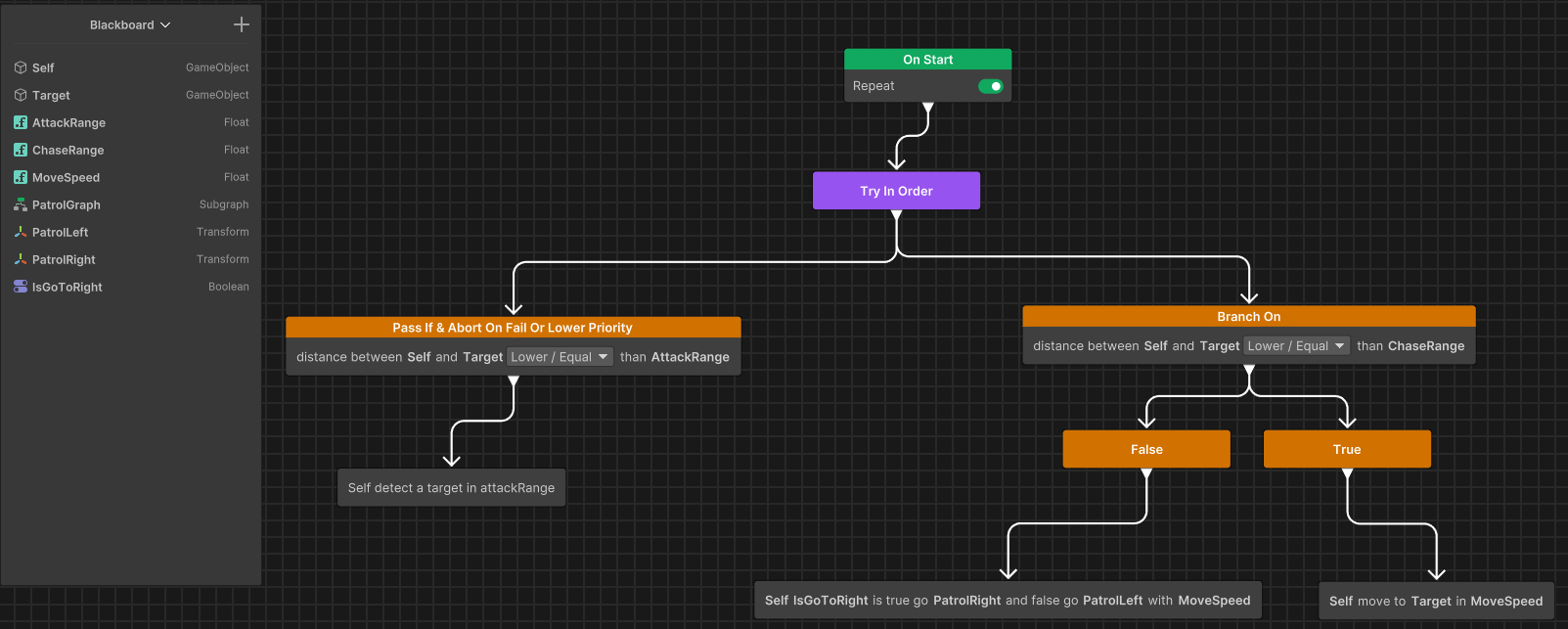
Graph 사용 후기
... 미묘하다.
확실히 눈에 보이는 것이 있어 좋긴 하다만,
먼저 Running State 에 대한 것이 문제다.
우선적으로 판별해야 하는 Behaivour 가 있기 때문에 Running State에서 강제로 탈출해야하는데, 이러한 것이 Code 에 들어가면 결국 해당 Behaviour 의 책임이 너무 커지게 된다.
전체 Tree 를 Scan 해야 하는 방식보다는 최적화 측면에서 좋겠지만,
이 부분에 대해서는 여러 궁리를 하면서 사용하거나,
Running State 를 사용하지 않는 것으로 일단 대체하거나 Decorator 를 활용하는 방안이 좋을 것 같다.
(근데 Python 처럼 가볍게 Decorator 를 입히는 것이 어렵다면 이것도 좀 어려운 영역이 될 것 같다)
Running State는 자체로 문제기 보다는 Condition 사용법을 숙지하지 못해서 나온 문제였다.
https://docs.unity3d.com/Packages/com.unity.behavior@1.0/manual/observer-abort.html
사용한 Condition 안에 Abort Target 은 곧 Condition Node 내 조건에 대한 Watcher를 설정하는 것이다.
None: 한번만 조건을 타고 그 이후로는 암것도 안함
Self: 내가 실행 중 내 조건이 맞지 않으면 나 스스로를 중단.
Lower Priority: 내가 실행 중이 아닐때 내 조건이 맞으면 나보다 우선순위가 낮은(오른쪽노드)를 강제로 종료시키고 내가 실행.
Both: self & lower priority 모두즉, 이번 실습처럼
- attackRange 내 -> 공격 가능
- chaseRange 내 -> 추적
- chaseRange 외 -> 패트롤
위에서 아래의 우선순위가 있는 경우
- Abort Target; lower priority
- Abort Target; both
- Abort Target; self
로 하면 State.Running이라도 정상적으로 강제적으로 끊고 가져오는 것이 확인되었다.
결과
