[MVG] 2차원 사영변환(Homography) 추정 (+ CPP 코드)
Multiple View Geometry 4장 "2차원 사영변환의 추정"에 대한 내용과 OpenCV, Ceres-Solver 라이브러리를 이용해 이를 직접 구현한 C++ 코드를 포함하고 있다.
1. 2차원 사영변환(Homography)
2차원에서 2차원으로의 점 대응 이 존재할 때 점 대응 사이의 변환을 H(homography)라 하며 로 나타낼 수 있다.
여기서 은 2차원 동차 좌표계로 3차원 벡터이며, 여기서는 편의를 위해 모든 점의 마지막 원소 으로 선택한다.
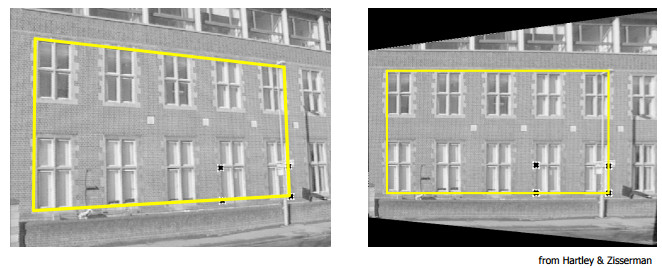
Homography를 이용하면 아래와 같이 Perspective correction(사영 정정)을 수행할 수 있다.
H를 추정하기 위해서 다음과 같은 과정을 거쳐야한다.
- DLT 또는 RANSAC 알고리즘을 이용해 초기값 계산.
- 비선형 최적화를 통해 기하 거리를 최소화하는 H 계산.
는 9개의 원소로 이루어져 있고, 1개의 scale을 제외하면 8의 자유도를 가진다. 그리고 1쌍의 점대응을 통해 2개의 방정식을 얻을 수 있으므로 최소 4쌍의 점 대응을 통해 H를 결정할 수 있다.
따라서 4쌍 이상의 점 대응이 주어진 경우에 우리는 RANSAC 알고리즘을 통해 4쌍의 점 대응을 선택하거나, DLT 알고리즘을 통해 를 계산해야 한다. 여기서는 DLT 알고리즘을 사용하기로 한다.
2. Direct Linear Transform(DLT) 알고리즘
먼저, 한 쌍의 점대응을 통해 2개의 방정식을 얻는 부분에 대해 설명하겠다.
의 관계를 두 벡터의 외적 으로 표현할 수 있다.
의 i번째 행벡터를 라 하면 두 벡터의 외적은 다음과 같다.
행렬 H를 와 같이 벡터로 정의하고,
이므로 부분을 뒤쪽에 배치하면 아래와 같은 방정식을 얻는다.
3개의 선형 방정식 중 2개만 선형 독립이기 때문에 마지막 행를 제외한 2개의 방정식을 얻게 된다.
마지막 행을 제외하고, 을 적용하면 최종적으로 한 쌍의 점 대응으로부터 를 얻을 수 있다.
네 쌍의 점대응이 주어지면 4개의 를 합쳐 를 만들고, 을 풀면 H를 계산할 수 있다.
그러나 네 쌍 이상의 점대응이 주어지고, 이미지 좌표 측정에 노이즈가 존재한다고 할 때, 의 을 만족하는 는 존재하지 않는다.
따라서 적절한 비용함수를 최소화하는 h의 근사해를 구해야하며, DLT 알고리즘에서는 의 제약조건을 만족하면서 을 최소화하는 h를 계산하게 된다.
결과적으로 h의 근사해는 의 가장 작은 고윳값(eigen value)에 해당하는 고유벡터 또는 SVD를 사용해서 구할 수 있는 A의 가장 작은 특이값(singular value)에 해당하는 특이벡터이다. 여기서는 SVD방법 사용하였다.
데이터 정규화
DLT 알고리즘을 수행할 때 데이터 정규화를 필수적으로 수행해야한다.
SVD를 이용해서 h의 근사해를 구하는 과정은 와 차이가 최소가 되는 에 대한 의 해를 구하는 것과 같다.
이미지 점의 좌표가 라고 하면 의 원소의 값은 대략적으로 을 가질 것이다. 어떤 차원의 좌표가 곱해지느냐에 따라 크기 차이가 발생한다. 의 차이를 최소화하는 과정에서 와 가 곱해진 원소의 값을 동일하게 변화시킬 때, 비용함수는 동일한 반면, w_i쪽이 훨씬 더 이미지에 변화가 크다. 따라서 데이터의 각 좌표의 평균, 표준편차 등의 값을 정규화해야한다.
정규화된 점 는 평균이 (0, 0)이고, 원점에서의 평균 거리가 이 되어야 하고, 이러한 변환을 만족하는 scale과 translation으로 이루어진 닮음 변환 T를 계산할 수 있다. MVG의 내용과 달리 OpenCV 라이브러리의 경우 평균이 (0, 0)이고, u좌표의 평균 크기가 1, v좌표의 평균 크기가 1이 되도록 scale_x, scale_y로 나누어서 T를 계산한다. 여기서는 OpenCV의 방법에 따라 구현하였다.
정규화된 데이터를 이용해서 DLT 알고리즘을 수행하면 정규화된 를 구할 수 있고, 이것을 다시 denormalize 해야한다.
를 로, 를 로 정규화하는 닮음 변환을 각각 라 할 때, 를 계산해 최종적인 H를 구한다.
3. 비선형 최적화
DLT 방법을 통해 ||Ah||를 최소화하였지만 이는 대수 오차를 최소화한 것으로, 비선형 최적화를 통해 기하 오차를 최소화 해주어야 한다.
비선형 최적화를 위해 여러가지 오차함수가 존재하지만 가장 간단한 이미지 하나에서의 오차를 사용하였다.
비용함수 :
비선형 최적화를 통해 비용함수를 최소화하는 H를 찾게 된다.
반복 최소화를 위해 Gauss-Newton, Levenberg-Marquatt 방법 등을 사용하며, Ceres-Sovler를 이용해 최적화를 진행하였다.
4. 전체 C++ 코드
두 이미지 사이의 점 대응 구한 뒤 find_homography 함수를 호출해 H를 얻을 수 있다.
#include <opencv2/opencv.hpp>
#include <ceres/ceres.h>
#include <ceres/rotation.h>
// Homography를 추정하기 위한 비용함수가 정의되어 있음.
// Ceres-Solver 비선형 최적화를 위해 필요하다.
struct homography_reproj_error
{
homography_reproj_error(const cv::Point2f &src_point, const cv::Point2f &dst_point)
: src_point(src_point), dst_point(dst_point)
{
}
template<typename T>
bool operator()(const T *const H, T *residuals) const
{
T pred_z = H[6] * T(src_point.x) + H[7] * T(src_point.y) + H[8];
T dst_point_est[2];
dst_point_est[0] = (H[0] * T(src_point.x) + H[1] * T(src_point.y) + H[2]) / pred_z;
dst_point_est[1] = (H[3] * T(src_point.x) + H[4] * T(src_point.y) + H[5]) / pred_z;
residuals[0] = dst_point_est[0] - T(dst_point.x);
residuals[1] = dst_point_est[1] - T(dst_point.y);
return true;
}
static ceres::CostFunction *create(const cv::Point2f &src_point, const cv::Point2f &dst_point)
{
return (new ceres::AutoDiffCostFunction<homography_reproj_error, 2, 9>(new homography_reproj_error(src_point, dst_point)));
}
const cv::Point2f src_point;
const cv::Point2f dst_point;
};
// 점 대응이 존재할 때 homography 추정
cv::Mat find_homography(
const std::vector<cv::Point2f> &src_points,
const std::vector<cv::Point2f> &dst_points)
{
std::size_t num_points = src_points.size();
std::vector<cv::Point2f> normalized_src_points(src_points);
std::vector<cv::Point2f> normalized_dst_points(dst_points);
cv::Mat T_src = normalize_image_points(normalized_src_points);
cv::Mat T_dst = normalize_image_points(normalized_dst_points);
cv::Mat A = cv::Mat::zeros(2 * num_points, 9, CV_64F);
for (std::size_t i = 0; i < num_points; ++i)
{
auto &src = normalized_src_points[i];
auto &dst = normalized_dst_points[i];
A.at<double>(2 * i, 0) = src.x;
A.at<double>(2 * i, 1) = src.y;
A.at<double>(2 * i, 2) = 1.0;
A.at<double>(2 * i, 6) = -1.0 * dst.x * src.x;
A.at<double>(2 * i, 7) = -1.0 * dst.x * src.y;
A.at<double>(2 * i, 8) = -1.0 * dst.x;
A.at<double>(2 * i + 1, 3) = src.x;
A.at<double>(2 * i + 1, 4) = src.y;
A.at<double>(2 * i + 1, 5) = 1.0;
A.at<double>(2 * i + 1, 6) = -1.0 * dst.y * src.x;
A.at<double>(2 * i + 1, 7) = -1.0 * dst.y * src.y;
A.at<double>(2 * i + 1, 8) = -1.0 * dst.y;
}
cv::Mat S, U, Vt;
cv::SVD::compute(A, S, U, Vt, cv::SVD::Flags::FULL_UV);
cv::Mat H = cv::Mat(3, 3, CV_64F, Vt.row(Vt.rows - 1).data);
H = T_dst.inv() * H * T_src;
H /= H.at<double>(2, 2);
refine_homography(H, src_points, dst_points);
H /= H.at<double>(2, 2);
return H;
}
// 데이터 정규화
cv::Mat normalize_image_points(std::vector<cv::Point2f>& points)
{
cv::Mat T = cv::Mat::eye(3, 3, CV_64F);
std::size_t num_points = points.size();
double x_center = 0.0, y_center = 0.0;
for(const auto& point : points)
{
x_center += static_cast<double>(point.x);
y_center += static_cast<double>(point.y);
}
x_center /= static_cast<double>(num_points);
y_center /= static_cast<double>(num_points);
T.at<double>(0, 2) = -1.0 * x_center;
T.at<double>(1, 2) = -1.0 * y_center;
for(auto& point : points)
{
point.x -= static_cast<float>(x_center);
point.y -= static_cast<float>(y_center);
}
double avg_dist_x = 0.0, avg_dist_y = 0.0;
for(const auto& point : points)
{
avg_dist_x += static_cast<double>(std::fabs(point.x));
avg_dist_y += static_cast<double>(std::fabs(point.y));
}
avg_dist_x /= static_cast<double>(num_points);
avg_dist_y /= static_cast<double>(num_points);
double scale_x = 1.0 / avg_dist_x;
double scale_y = 1.0 / avg_dist_y;
T.at<double>(0, 0) = scale_x;
T.at<double>(1, 1) = scale_y;
T.at<double>(0, 2) *= scale_x;
T.at<double>(1, 2) *= scale_y;
for(auto& point : points)
{
point.x *= static_cast<double>(scale_x);
point.y *= static_cast<double>(scale_y);
}
return T;
}
// 비선형 최적화
void refine_homography(
cv::Mat &H,
const std::vector<cv::Point2f> &src_points,
const std::vector<cv::Point2f> &dst_points)
{
std::size_t num_points = src_points.size();
std::vector<double> homography(9);
for(std::size_t i = 0; i < 3; ++i)
{
for(std::size_t j = 0; j < 3; ++j)
{
homography[3 * i + j] = H.at<double>(i, j);
}
}
auto problem = std::make_unique<ceres::Problem>();
ceres::Solver::Options options;
ceres::Solver::Summary summary;
options.linear_solver_type = ceres::ITERATIVE_SCHUR;
options.num_threads = 8;
options.minimizer_progress_to_stdout = true;
options.parameter_tolerance = 1e-12;
options.gradient_tolerance = 1e-14;
options.function_tolerance = 1e-10;
for (std::size_t i = 0; i < num_points; ++i)
{
ceres::CostFunction *cost_function = homography_reproj_error::create(src_points[i], dst_points[i]);
problem->AddResidualBlock(cost_function, NULL, homography.data());
}
ceres::Solve(options, problem.get(), &summary);
for(std::size_t i = 0; i < 3; ++i)
{
for(std::size_t j = 0; j < 3; ++j)
{
H.at<double>(i, j) = homography[3 * i + j];
}
}
}
