모든 Paper review는 제가 공부하고 남기는 기록입니다.
잘못된 내용이나 추가 의견이 있으시면 언제든 자유롭게 댓글 남겨주세요.Published: Deepmind, 2016
Paper: https://arxiv.org/abs/1608.05343
2016년 딥마인드에서 나온 논문입니다.
당시엔 많이 주목을 받았다고 하는데, 어떤 이유로 지금은 그다지 언급되지 않고 있는지 이유를 생각하면서 논문을 읽어보도록 하겠습니다.
[요약]
-
기존의 신경망들은 가중치를 업데이트하기 위해 Forward-Backward 과정이 반드시 먼저 완료되어야 합니다. 이 때 Forward, Backward, Update Locking 문제들이 발생합니다.
-
Decoupled Neural Interfaces (DNI)는 Synthetic Gradient 개념을 도입하여 모듈(레이어, 뉴런)별로 병렬 학습이 가능한 weight update 방법입니다.
-
기존의 Backpropagation에서 가중치 업데이트 과정과 오차 전파를 위한 메모리 처리 과정을 분리한 것입니다.
[서론]
Abstract
-
Neural Network를 직접 훈련시키려면 일반적으로 계산 그래프를 활용하여 순전파와 역전파를 통해 가중치를 업데이트하는 과정을 거쳐야 합니다.
-
그래서 NN의 각 레이어, 정확히는 네트워크를 구성하는 각 모듈들은 순전파-역전파 과정을 거쳐 가중치가 업데이트될 때까지 기다려야 합니다. 이걸 Locking이라고 합니다. 본 논문에서 제시하는 Decoupled Network Interfaces (DNI)는 이러한 locking 문제를 해결하기 위한 방법입니다.
-
DNI는 backpropagation 과정에서 모델링한 synthetic gradient를 가지고 각 뉴런들을 비동기 방식으로 업데이트하는 방법입니다. local information만 가지고 modelled subgraph의 연산 결과를 추정하는 것이죠. 또한 이러한 gradient approximating 방식은 input 예측에도 사용할 수 있다고 합니다.
1. Introduction
-
Locking 문제에는 몇 가지 종류가 있습니다.
1) Forward Locking
모든 모듈은 이전 모듈의 순전파 작업이 끝나기 전까지 입력 데이터를 처리할 수 없습니다. 레이어의 입력은 레이어의 출력을 받는 형태로 되어 있기 때문입니다.2) Update Locking
모든 모듈은 연결된 모듈들의 순전파가 모두 끝나기 전까지 가중치를 업데이트할 수 없습니다. Backpropagation 알고리즘은 최종 출력을 Loss값으로 잡고 시작하기 때문입니다. (최종 계산 결과를 알기 전까지 각 뉴런들의 가중치를 얼마나 수정해야 하는지 알 수 없음)3) Backward Locking
2번과 같은 이유로, Backpropagation을 포함해서 많은 credit-assignment 알고리즘은 연결된 모듈들의 순전파-역전파 과정이 모두 끝나기 전까지 가중치를 수정할 수 없습니다.
주1:
Credit-Assignment는 신뢰 할당이라고 번역되며, 보통 강화학습 분야에서 많이 사용하는 용어입니다. Credit-Assignment Problem은 "네트워크를 구성하는 모듈들의 기여도를 파악할 수 있는가?" 에 대한 문제입니다.예를 들어 오차역전파 알고리즘은 오차 전파 과정에서 각 레이어의 weight가 얼마나 업데이트 되어야 하는지 알 수 있기 때문에 Credit-Assignment 알고리즘이라고 할 수 있습니다.
-
Locking 문제 때문에 DNN은 순차적/동기적(sequential, synchronous)으로 학습해야 한다는 제약이 생기게 됩니다. 만약 병렬적으로 가중치를 업데이트할 수 있다면 학습 속도가 크게 향상될 수 있겠죠?
-
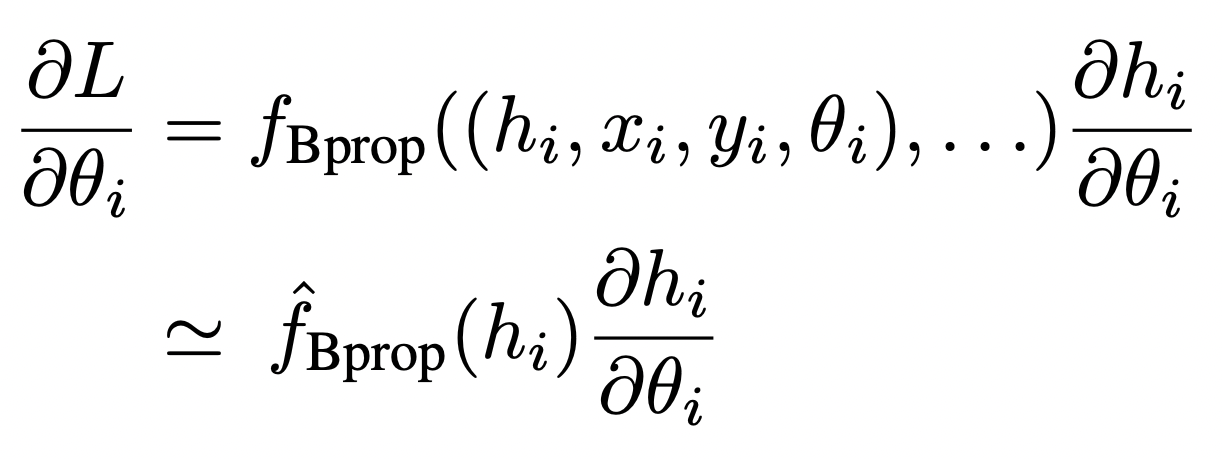
본 논문에서 해결하고자 하는 문제는 Update Locking입니다. 구체적으로는 아래와 같이 backprop을 쓰지 않고 모듈 의 가중치 를 추정하는 방법을 제시했습니다.
-
는 모듈의 출력값인 activation, 는 입력값, 는 supervision (label 등), 은 최적화해야 하는 loss function입니다.
원래 수식은 이 필요한 반면,
해당 식을 근사한 에서는 정보만 있으면 됩니다.즉, 임의의 모듈 은 에서 보내준 activation 정보만으로 자신의 error gradient 값을 업데이트할 수 있게 되는 것입니다. 이렇게 계산한 gradient 값을 Synthetic Gradients 라고 합니다.
이와 같은 방식으로 Update locking을 제거하면 각 모듈이 병렬적으로 학습할 수 있습니다.
주2:
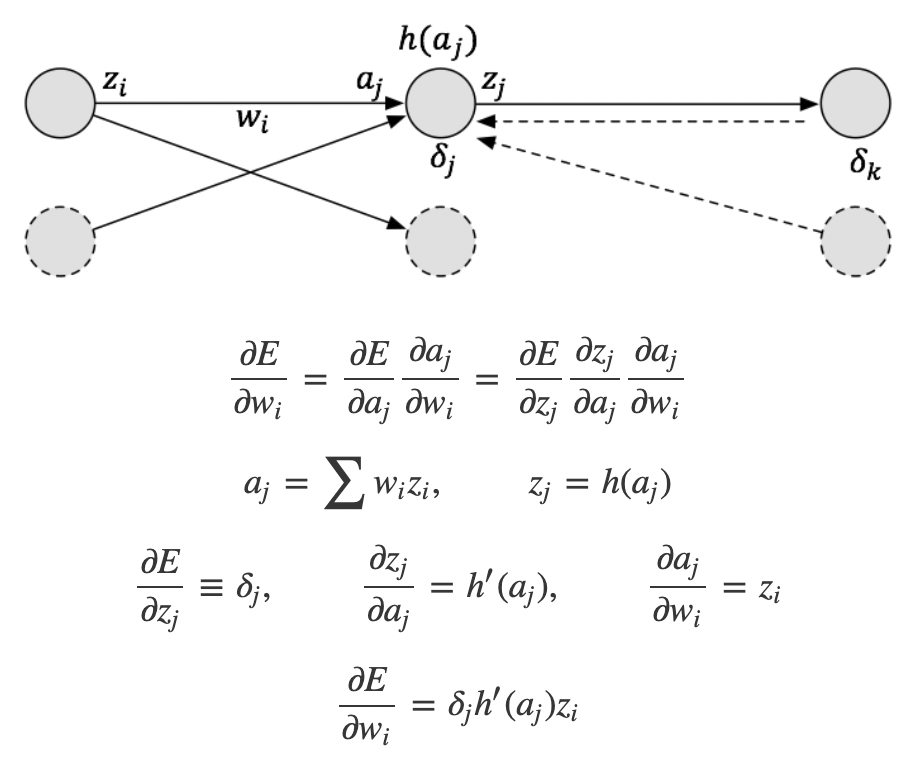
논문에는 중간 과정이 생략돼 있는데, norman3님 블로그에 자세하게 설명된 내용이 있어 참고하면서 이해해 보겠습니다.
레이어 일 때,
의 출력,
의 가중치,
의 입력,
Synthetic gradient 라고 하면,구하고자 하는 가중치 가 됩니다.
이고, 이므로
가 됩니다.
따라서 로 근사할 수 있습니다.
이에 따라 논문에서 표현한 식을 다시 바꿔보면,
이고 가 됩니다.
[본론]
2. Decoupled Neural Interfaces
-
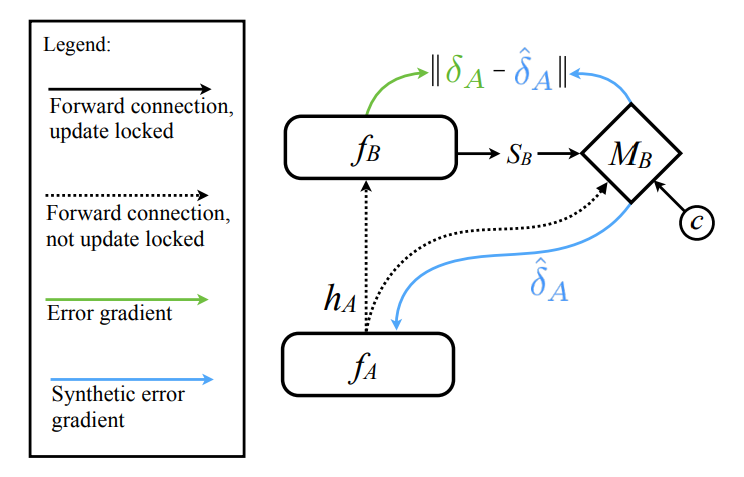
그림을 보면서 구체적인 작동 과정을 이해해 보겠습니다.
(1) 모듈 는 activation 을 다음 모듈 와 DNI 모듈 에 전달합니다.
(2) 는 synthetic gradient 를 생성합니다.
( = 의 일부 상태 정보, = 계산에 필요한 기타 정보)(3) 는 를 전달받아 gradient 값을 업데이트합니다.
(4) 는 에게서 진짜 그래디언트 값 를 전달받아 오류를 수정합니다.
- 위 gif를 보면 메커니즘을 조금 더 쉽게 이해할 수 있습니다.
-
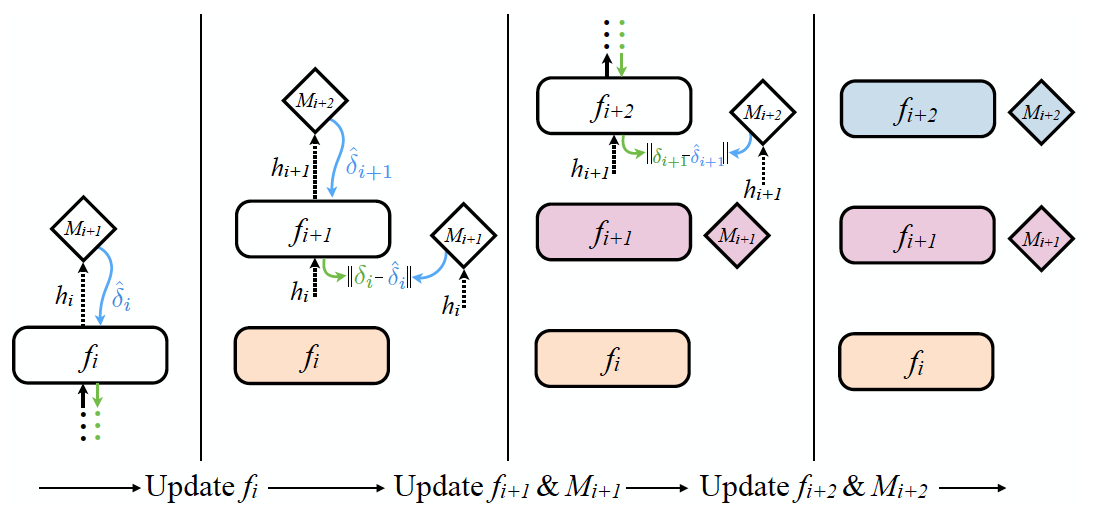
이번에는 여러 층을 가진 네트워크에 DNI를 적용하는 경우를 살펴보겠습니다.
(1) 먼저 의 출력 를 에 전달합니다.
(2) 에서 를 전달받아 가중치를 수정합니다.
(3) 그 동안 는 출력 를 에 전달합니다.
(4) 가 전달받은 을 로 전달합니다.
(5) 의 가중치를 수정합니다.
주3:
업데이트에 사용되는 도 synthetic gradient이기 때문에, 를 얼마나 잘 추정하느냐가 DNI 성능의 핵심이라고 볼 수 있습니다. 다만 DNI 모듈이 복잡해질수록 computational cost도 크게 증가한다는 단점이 있겠죠?
논문에서는 이러한 이유 때문에 단순한 MLP 네트워크를 통해 synthetic gradient를 추정합니다.
2.1 Synthetic Gradient for Recurrent Networks
-
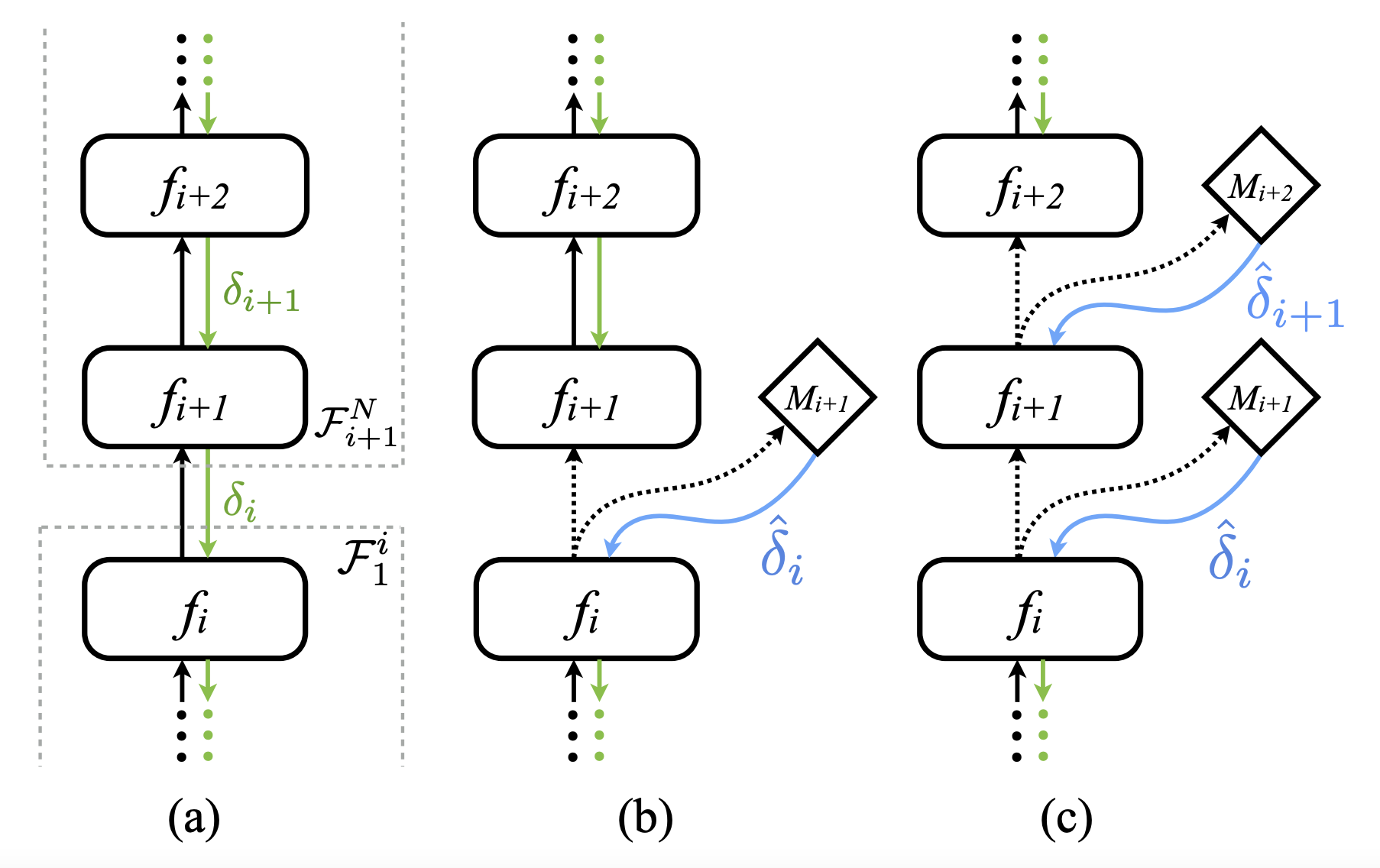
RNN과 같은 recurrent network에도 DNI를 적용할 수 있습니다.
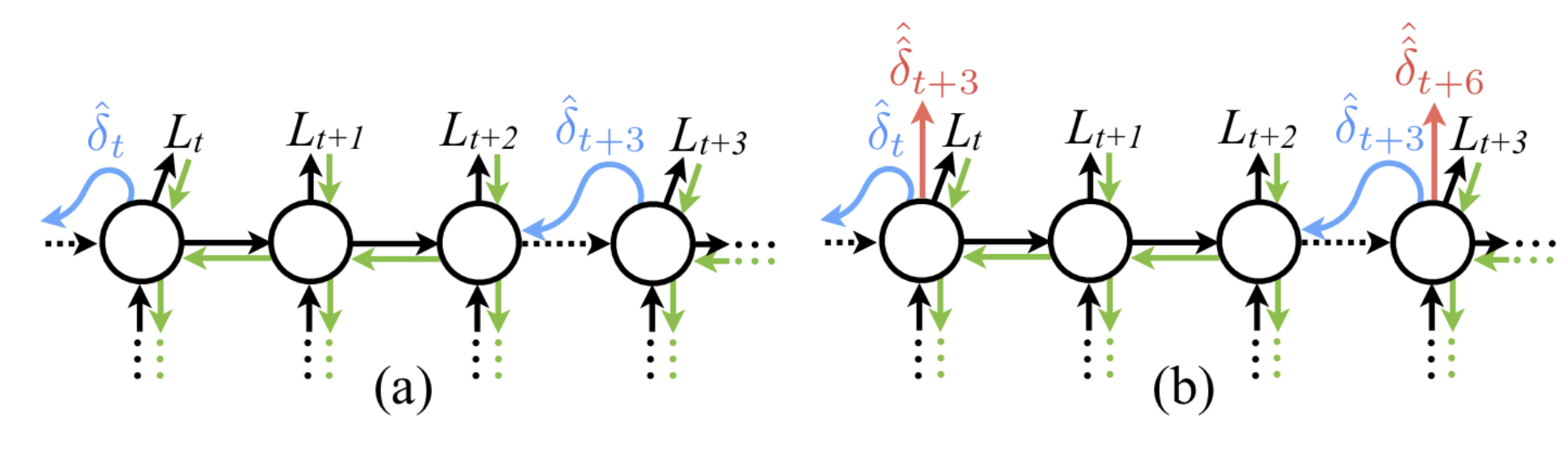
(a)는 DNI를 적용한 truncated BPTT 방식으로 학습한 RNN입니다. 중요한 것은 (b) 그림처럼 future synthetic gradient를 예측할 수도 있다는 것입니다. 매 time step마다 synthetic gradient 를 생성하기 때문에 (=truncate 단위), 를 minize 해주는 방향으로 학습시키면 됩니다.
주4:
값을 최소화한다는 것은 truncated된 단위별로 최종 그래디언트 값을 예측할 수 있다는 것과 같습니다. 이게 무슨 말일까요?
위와 같이 무한하게 이어지는 RNN 구조가 있다고 가정해 보겠습니다. 이 모델에서 우리가 원하는 gradient 값은 다음과 같이 얻을 수 있습니다. ( = learning rate)
하지만 현실적으로는 time dependency 문제를 해결하기 위해 아래와 같이 Truncated BPTT 구조로 학습을 진행하게 됩니다.
식으로 표현하면 다음과 같습니다. (위 그림의 경우 T=3)
여기서 으로 놓으면 식을 편하게 계산할 수 있습니다. 일반적으로는 이런 방법을 통해 gradient를 구하게 됩니다.
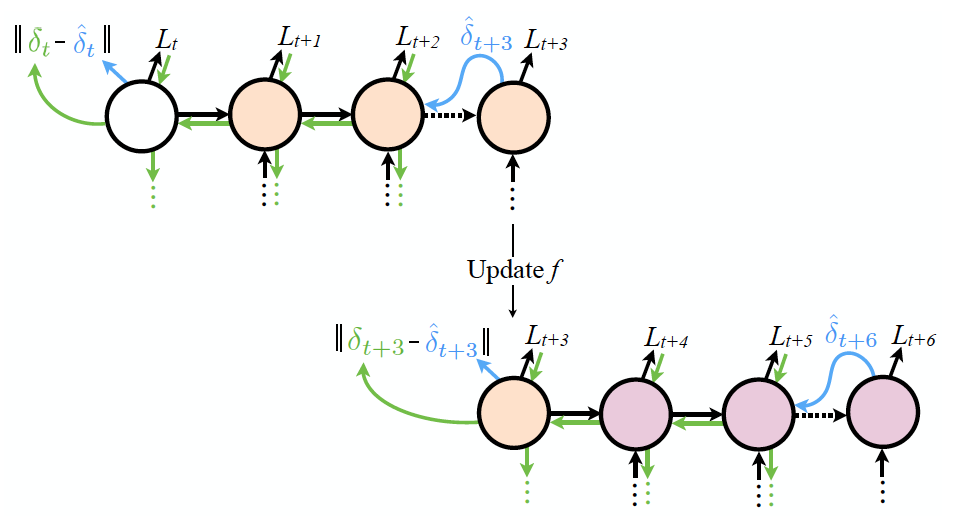
- 하지만 이라는 가정은 상당히 naive합니다. n번째 truncated Loss 값을 추정하기 위해 n+1번째 truncated module까지는 최적화가 되었다고 보는 관점이니까요.
- 그래서 논문에서는 위와 같이 synthetic gradient를 써서 truncated 단위별로 업데이트하는 방식을 제안합니다. 그림을 보면 t+T 번째 노드에서 값을 업데이트하고 있습니다. T개씩 노드를 묶어서 한 덩어리로 생각하는 것입니다. 아래 gif를 보면 더 이해가 잘 될 겁니다.


2.2 Synthetic Gradient for Feed-Forward Networks
- feed forward network에도 마찬가지 방식으로 DNI을 적용할 수 있습니다.
3. Experiments
- 상세한 실험 세팅은 논문을 참고하세요.
-
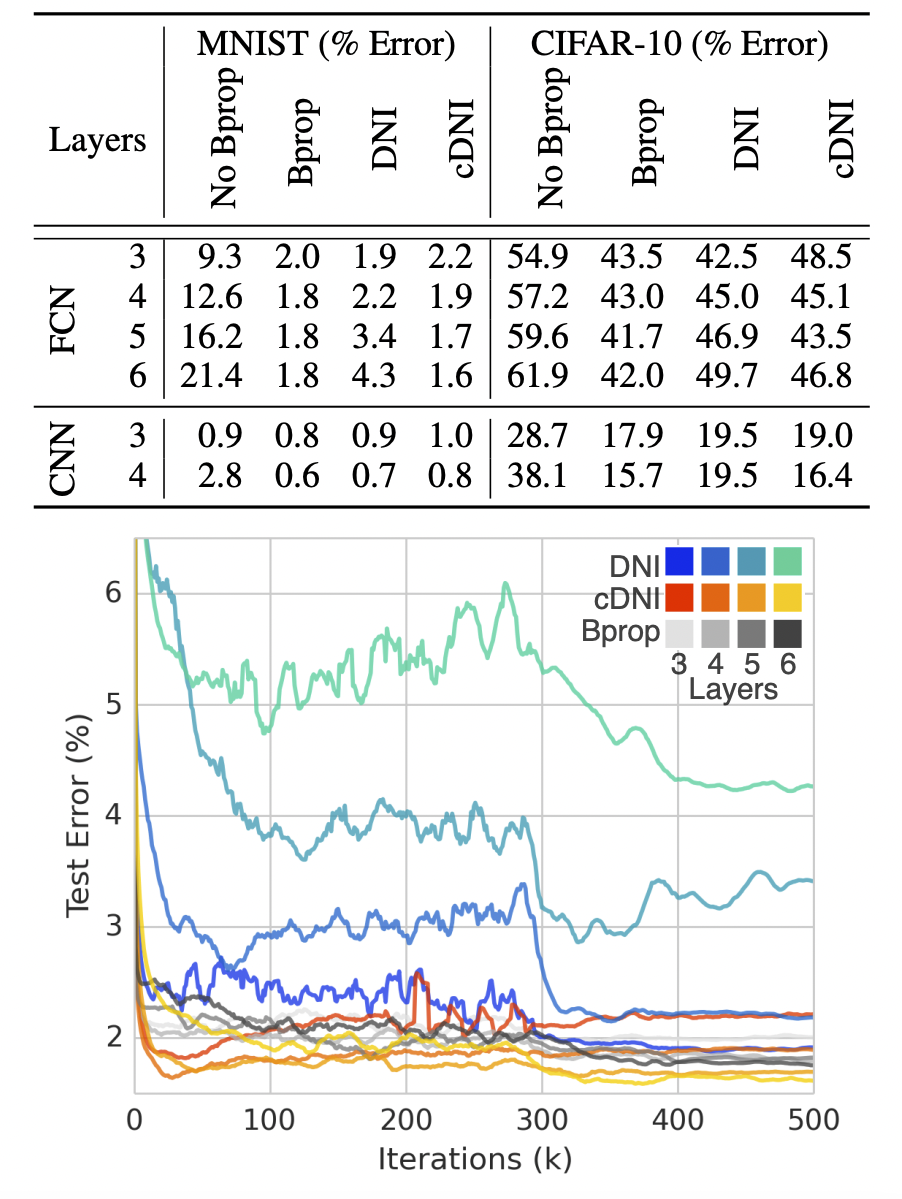
cDNI는 conditioned DNI로, 이미지의 label 값을 에 추가한 버전입니다.
-
실험 결과를 보면 전반적으로 기존의 backprop보다 약간 더 높은 Loss를 보이지만 학습 결과는 거의 비슷합니다. 다만 그냥 DNI를 사용하기보다 cDNI를 사용하는 것이 훨씬 안정적인 학습이 가능합니다.
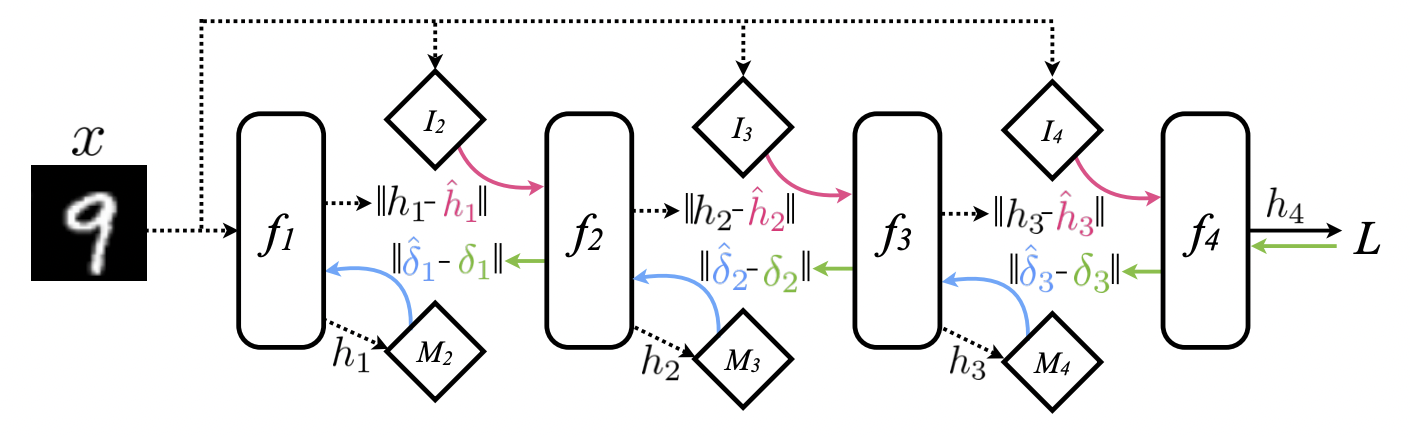
- 위와 같이 complete unlock 구조의 네트워크 학습도 가능합니다.
synthetic gradient 뿐 아니라 synthetic input도 사용합니다.

-
RNN 구조(LSTM)에서는 DNI를 적용하면 성능이 확연히 향상됩니다.
위 표에서 repeat copy는 복원에 성공한 시퀀스 수이고,
penn treebank는 BPC (Bits Per Character) 값입니다.Aux는 Truncated 단위로 synthetic gradient를 업데이트하는 모듈입니다.
주5:
논문에는 RNN 구조에서 DNI 모듈이 성능을 향상시키는 원인에 대해 명확하게 설명하지 않습니다.
개인적인 생각으로는, Synthetic Gradient를 추정하는 과정에서 recurrent network 특유의 정보 소실 현상이 예방되는 효과가 나타난다는 가설 정도를 고려할 수 있을 것 같은데요.
실제로 위 실험 결과를 보면 Aux 모듈이 추가된 DNI의 성능이 더 뛰어납니다. 또한 표를 잘 보면 값에 따라 성능 향상의 추이가 변화하는데, 이는 해당 모듈이 Truncated 단위 기준으로 각 단위 모듈 간에 정보를 전달한다는 점을 고려했을 때, Approximated Residual 정도의 개념으로 이해할 수 있겠습니다.
참고 문헌
- norman3님의 DNI 리뷰 (https://norman3.github.io/papers/docs/synthetic_gradients.html)
- Deepmind 블로그 (https://www.deepmind.com/blog/decoupled-neural-interfaces-using-synthetic-gradients)
- BEOMSU KIM 님의 DNI 리뷰 (https://shuuki4.github.io/deep%20learning/2016/08/24/Synthetic-Gradient-%EB%85%BC%EB%AC%B8-%EC%A0%95%EB%A6%AC.html)
- 박해선님 블로그 (https://tensorflow.blog/2016/08/22/decoupled-neural-interfaces-using-synthetic-gradients1608-05343-summary/)
