[EECS 498-007 / 598-005] 강의정리 - 19강 Generative Models I
[CS231n] + [EECS 498-007 / 598-005]
Generative Models I
- Supervised Learning vs Unsupervised Learning
- Discriminative vs Generative Models
2.1) 위 Models을 가지고 무엇을 할 수 있을까
2.2) Taxonomy of Generative Models - Autoregressive Models
3.1) Explicit Density Estimation
3.2) Explicit Density: Autoregressive Models
3.3) PixelRNN
3.4) PixelCNN
3.5) 결과 및 결론 - Variational Autoencoders
4.1) (Regular, non-variational) Autoencoders
4.2) Variational Autoencoders Overview
4.3) Variational Autoencoders
1. Supervised Learning vs Unsupervised Learning
| Supervised Learning | Unsupervised Learning | |
|---|---|---|
| Data | ||
| Goal | 로 가는 function을 학습 | Learn some underlying hidden structure of the data |
| Examples | Classification, regression, object detection, semantic segmantation, image captioning, etc. | Clustering, dimensionality reduction, feature learning, density estimation, etc. |
Unsupervised Learning 예시
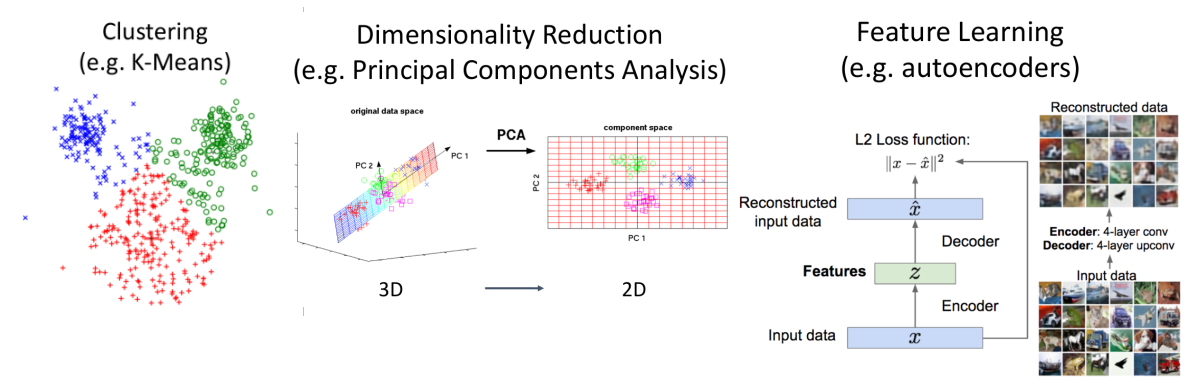
2. Discriminative vs Generative Models
Density Function
는 각 가능한 에 대해 양의 값을 가진다. 더 클수록 가 더 그럴듯 하다.
Density Functions는 nomalized되어있다:
확률의 합이 1이 되므로 만약 하나의 확률이 크다면 다른 확률들은 줄어들게 된다. (compete each other)
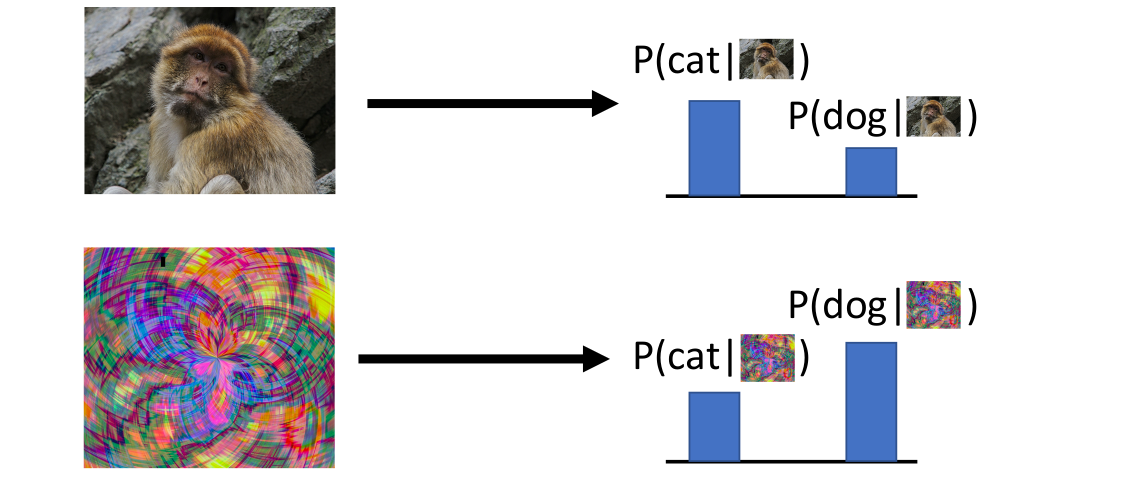
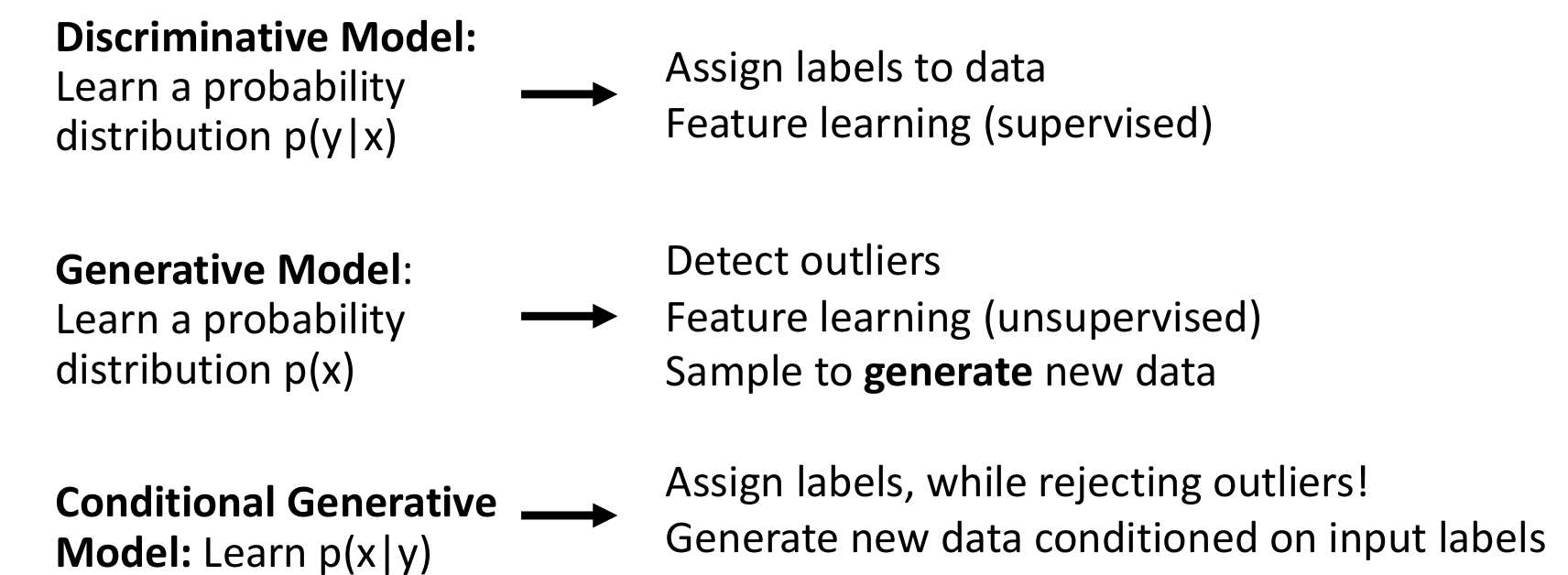
✅️ Discriminative Model
Learn a probability distribution that predicts probability of the label conditioned on the input image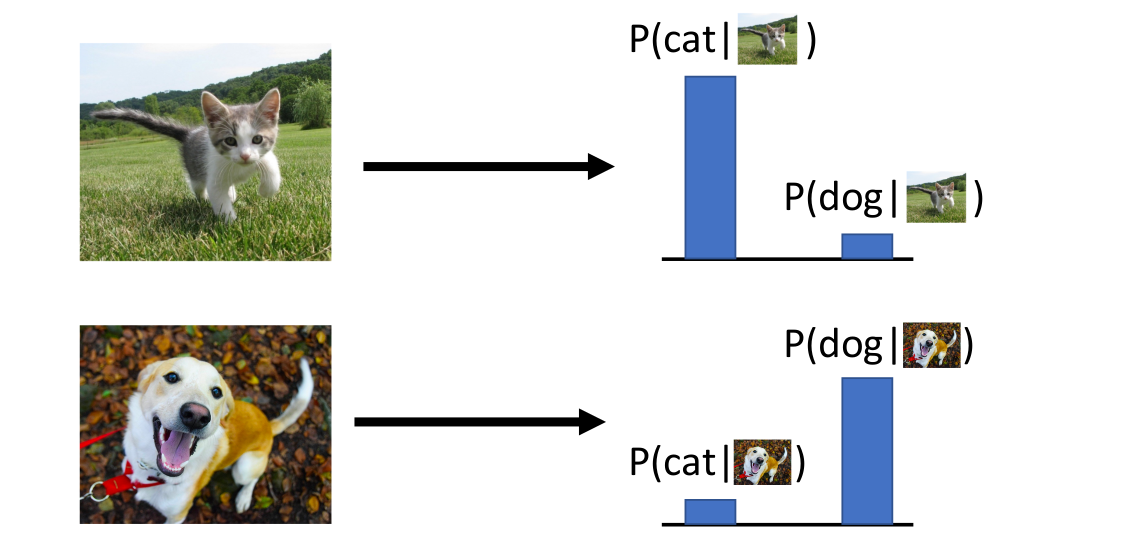
-
input 를 입력받아서 그에 대한 label이 나올 확률을 구한다.
-
각 input에 대한 가능한 labels사이에서 probability에 대해 compete한다.
-
그러나 input images 사이에서는 compete하지 않는다.
-
정해놓은 labels와 다른 input이 주어져도 확률을 계산한다.
-
✅️ Generative Model
Learn a probability distribution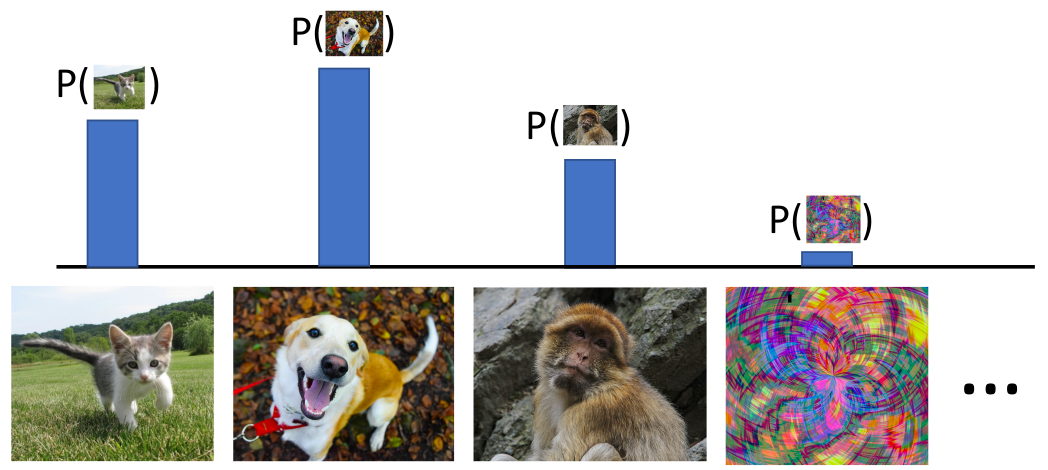
- 모든 가능한 images가 probability mass에 대해 compete한다.
- 이미지에 대한 깊은 이해가 필요하다. (개가 앉은것 vs 일어선 것 중 어느 것이 더 그럴듯한가?)
- 모델은 불합리적인 inputs에 매우 작은 값을 부여하여 reject할 수 있다.
✅️ Conditional Generative Model
Learn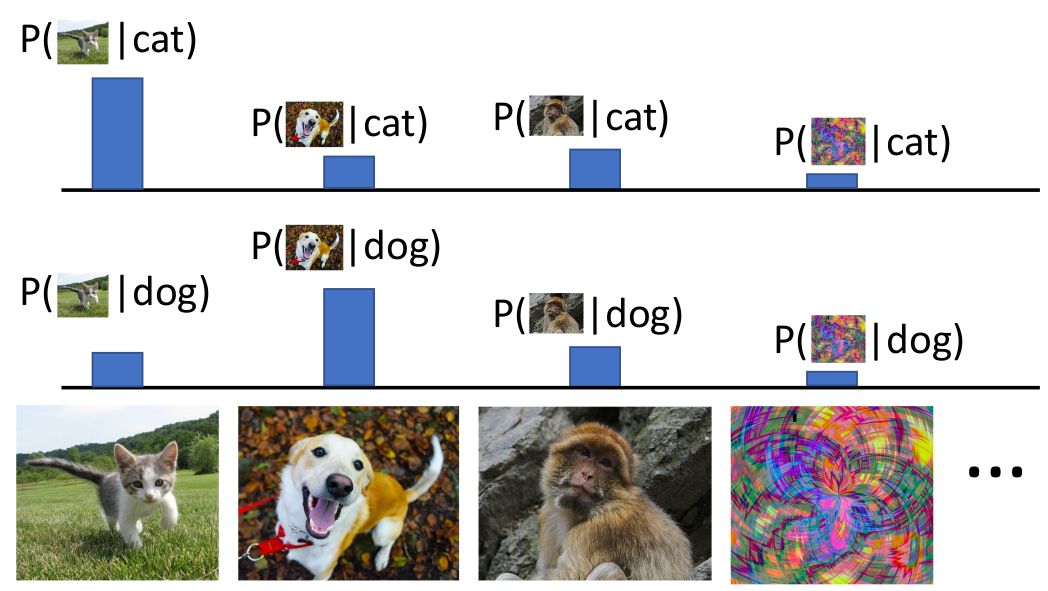
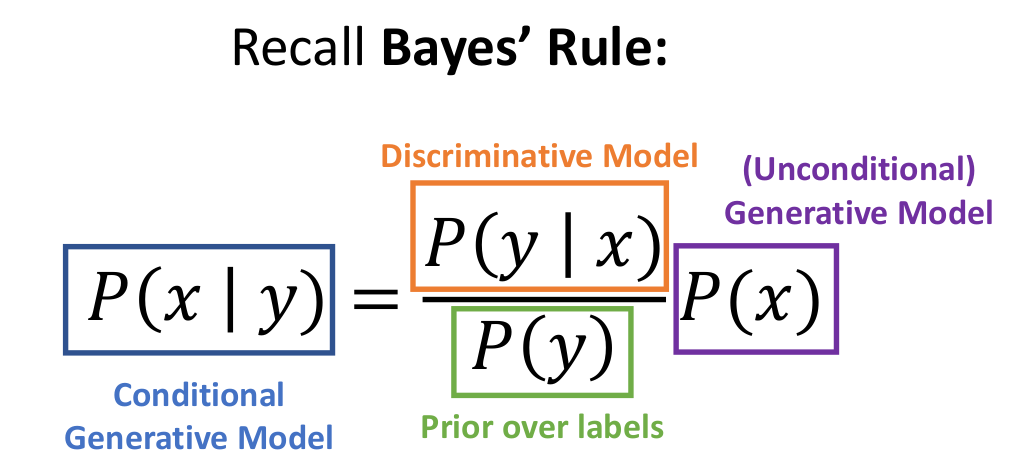
2.1) 위 Models을 가지고 무엇을 할 수 있을까
2.2) Taxonomy of Generative Models
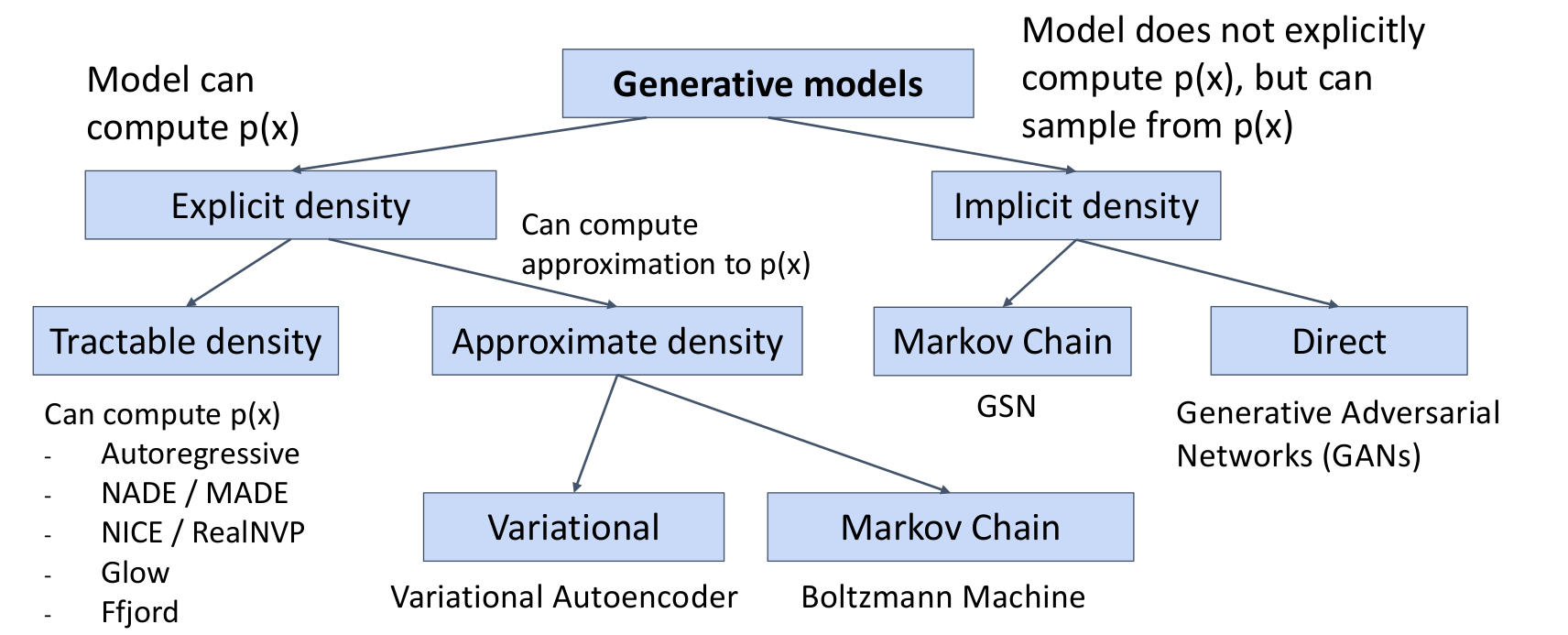
-
Explicit density : desity function 을 계산한다.
- Tractable density
- Approximate density : 를 근사한다.
- Variational
- Markov Chain
-
Implicit density : 를 계산하지는 않지만 로부터 샘플링한다. (의 값을 얻을 수는 없다. 가 큰 값을 가지는 것에서 샘플링한다.)
- Markov Chain
- Direct
3. Autoregressive Models
3.1) Explicit Density Estimation
Goal : Write down an explicit function for
의 dataset이 주어졌을 때, 아래의 식을 해결하여 모델을 학습한다.
3.2) Explicit Density: Autoregressive Models
자기 자신을 입력으로 하여 자기 자신을 예측하는 모형 (출처)
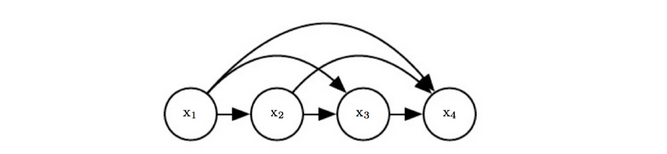
- 가 여러 subparts로 이루어져있다고 가정한다. 가 이미지라고 하면, subparts는 각 픽셀이다.
- chainrool을 사용하여 probability를 계산한다.즉, sequence의 확률 는 이전 sequence가 주어졌을 때 다음 sequence가 나올 확률을 전부 곱한 것이다.
대체 무엇이 probability distribution이고 어떻게 계산이 된다는 것인지 개념이 잘 이해가 안간다면 이 링크를 보고 다시 깨우보자..
이는 이전 subparts를 모두 가지고 다음 subpart를 계산하는 RNN모델과 유사하다.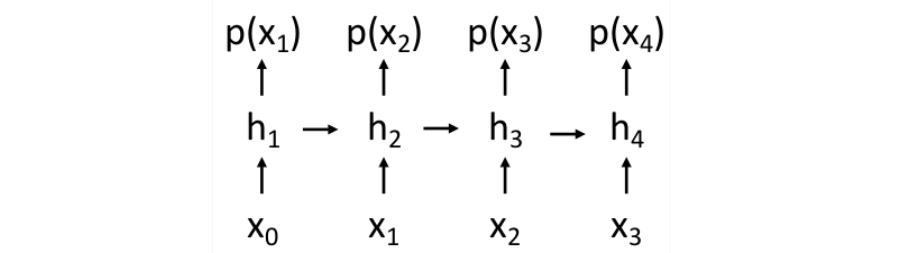
3.3) PixelRNN
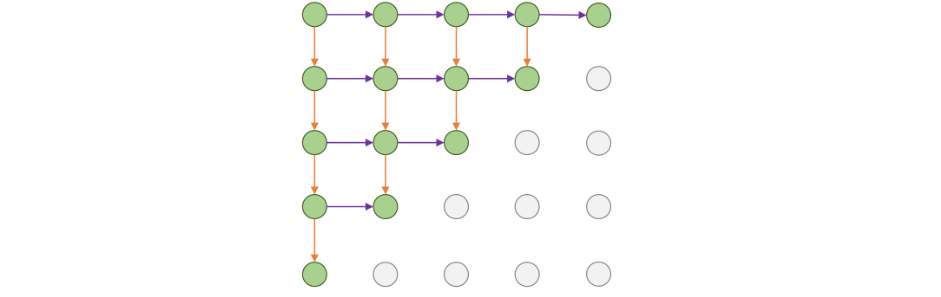 왼쪽 위의 pixel에서부터 시작하여
왼쪽 위의 pixel에서부터 시작하여 RNN을 통해 한번에 하나의 pixel을 생성한다.
각 pixel의 hidden state는 왼쪽과 위쪽의 hidden state와 RGB values에 의존한다.
그리고 channel은 R, G, B의 순서로 정의하여 계산한다. (출처)




그러나 NxN이미지는 2N-1의 sequential steps를 필요로 하므로 training과 testing에서 모두 매우 느리다.
3.4) PixelCNN
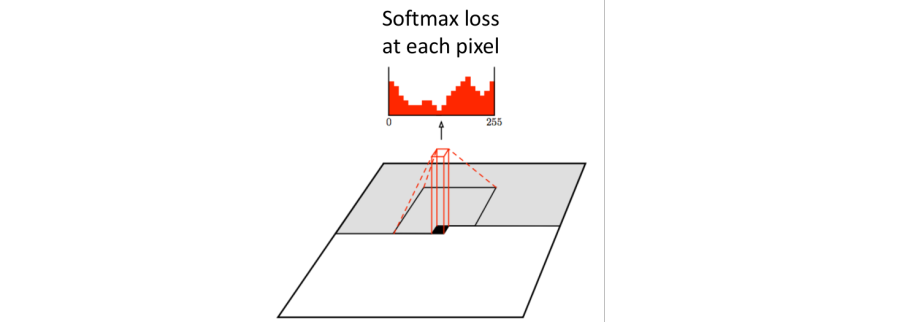 이전 pixel들로부터 의존성을 가져오기 위해 convolution을 사용한다.
이전 pixel들로부터 의존성을 가져오기 위해 convolution을 사용한다. PixelRNN에서처럼 왼쪽 위 pixel에서 시작하여 하나하나 pixel을 생성한다.
그러나 미래 정보를 반영하면 안되기 때문에 convolution연산에 반영하지 않을 부분에 0을 곱해서 제외한다.
PixelRNN보다 Training시 더 빠르다.(Training 이미지에서 context region 이후의 값들을 알기 때문에 convolution을 병렬계산할 수 있다.
그러나 Generation 시에는 sequential하게 작동하므로 여전히 느리다.
3.5) 결과 및 결론
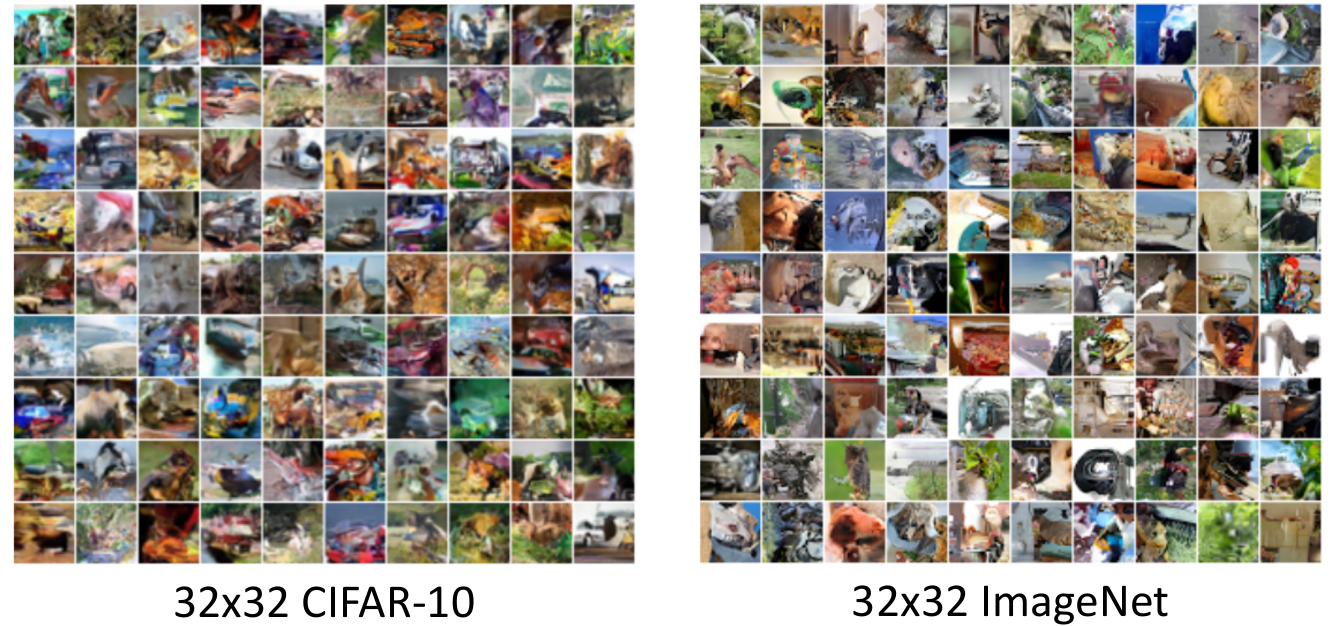 위 사진은
위 사진은 PixelRNN으로 생성한 이미지이다.
- 겉으로 보기에는 합리적으로 보이지만 사실 자세히 보면 거지같다..
- 그래도 edges, colors를 꽤나 그럴싸하게 생성하는 것에 의의를 가진다.
- 이는
unconditional generation이므로 test time에 내가 무엇을 생성하고 있는지 정할 수 없다.
✅️ Autoregressive Models 장단점
- Pros
Likelihood를 명시적으로 계산할 수 있다.- 위의 장점 덕분에 좋은 evaluation metric을 얻는다. (training data와 유사한, 즉 얼마나 그럴듯한지에 대한 값을 얻을 수 있기 때문이다.)
- 나름 괜찮은 결과를 얻을 수 있다. (진짜 사진같지는 않지만..)
- Cons
Sequential Generation이므로 느리다.
4. Variational Autoencoders
PixelRNN과 PixelCNN에서는 parametric densitiy function 을 정의하여 각 input에 대해 계산하고 각 input에 대해 값을 최대화하도록 학습하였다.
VAE에서는 실제 density 값을 최대화하는 대신, density의 lower bound를 최대화시킨다.
4.1) (Regular, non-variational) Autoencoders
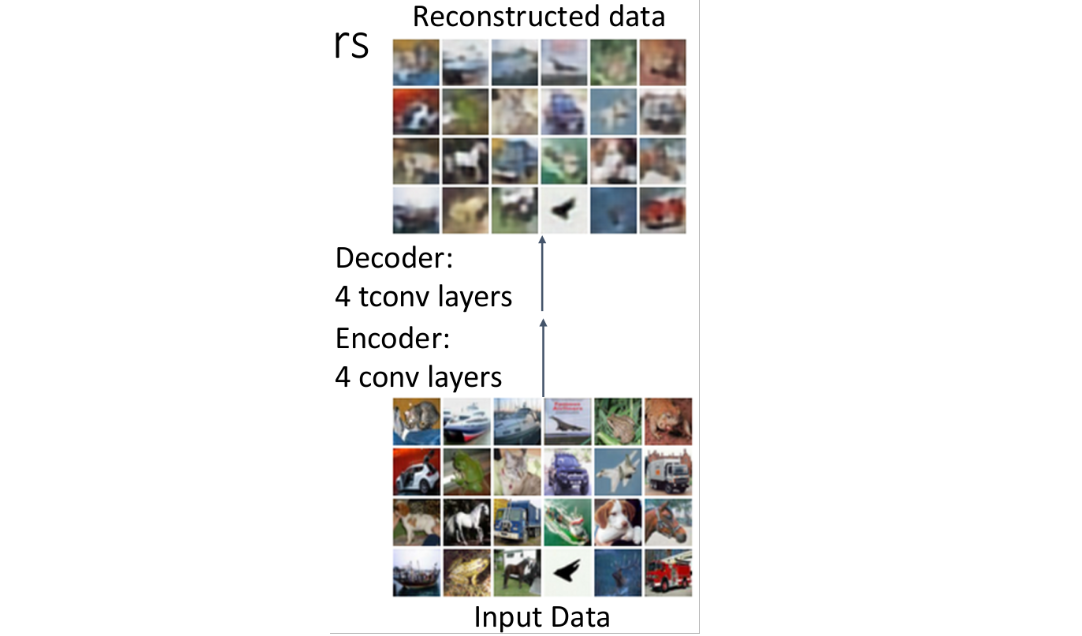
Unsupervised method로, labels 없이 raw data 로부터 feature vectors를 학습한다.
Unsupervised method for learning feature vectors from raw data x, without any labels
- Features는 downstream tasks에 활용할 수 있는 유용한 정보를 추출한다.
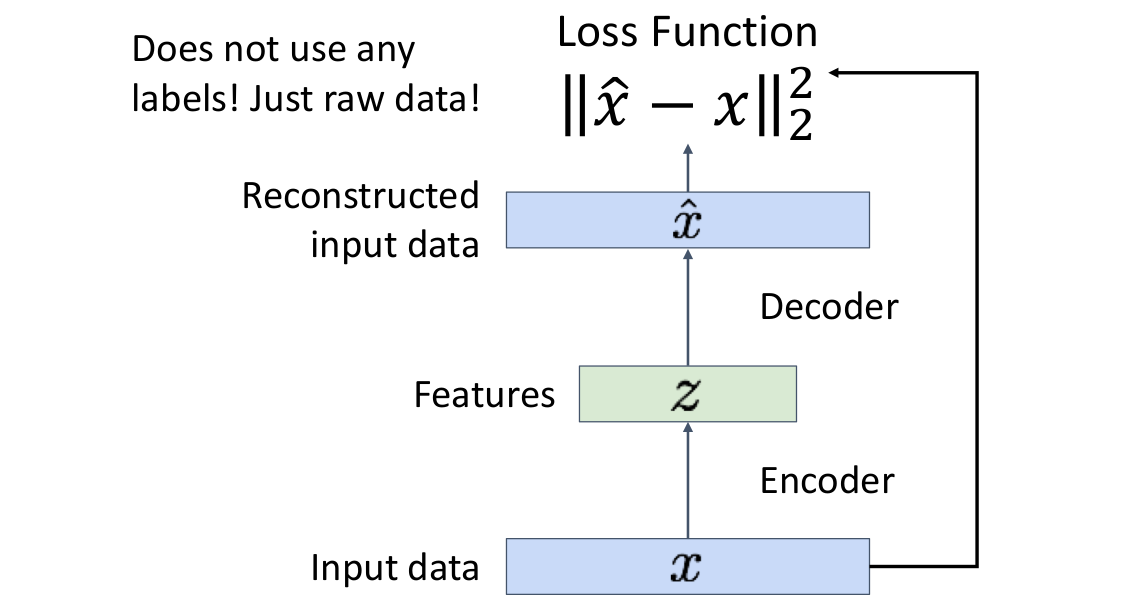
-
Encoder을 통해 input data에서 추출한 features를 사용하여 -
Decoder을 통해 다시 input data를 reconstruct한다. -
Encoder은- Originally: Linear + nonlinearity (sigmoid)
- Later: Deep, fully-connected
- Later: ReLU CNN (upconv)
로 이루어져 있다.
 우리는
우리는 Encoder을 통해 input data를 압축 (lower dimension)하는 효과를 기대한다.
- 학습을 마친 후,
decoder을 버리고,encoder을 사용하여 downstream task에 사용한다. - Not probabilistic : 학습하지 않은 new data를 sampling할 수 없다.
4.2) Variational Autoencoders Overview
처음 보면 이해가 매우 힘든 개념이라서 다시 볼 때도 (출처)를 읽어서 이해하려고 해보자..
Autoencoder에 확률 개념을 도입하였다
1. raw data로부터 latent features 를 학습한다.
2. new data를 생성하기 위해 model로부터 sampling한다.
✅️ 기본개념
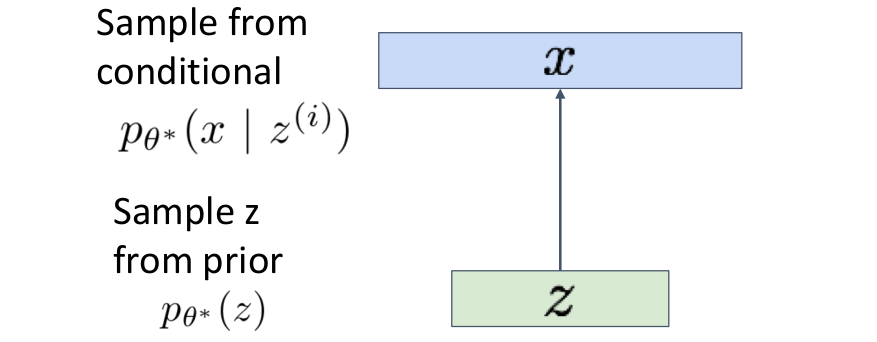 latent features 로부터 input data와 유사하지만 완전히 새로운 data인 를 생성하는 과정이다. (
latent features 로부터 input data와 유사하지만 완전히 새로운 data인 를 생성하는 과정이다. (Decoder부분이다.)
prior distribution 에서 latent variable을 sample하고, sampling한 를 decoder에 넣어서 image 를 predict한다. 이때 output은 single image가 아니라 images에 대한 distribution이다.
: prior distribution으로 의 확률밀도함수이다. 가우시안을 따른다고 가정한다.
: 주어진 에서 특정 가 나올 조건부 확률에 대한 확률밀도함수
: 파라미터
VAE에서의 는 AE에서의 (a value: low dimension of input data)와 다르게,
가우시안 확률분포에 기반한 확률값으로 나타낸다.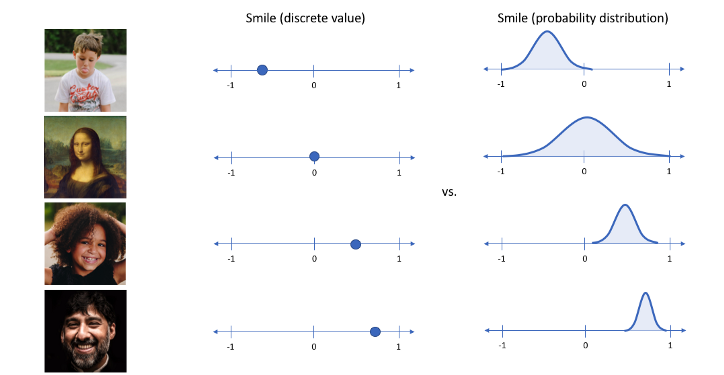
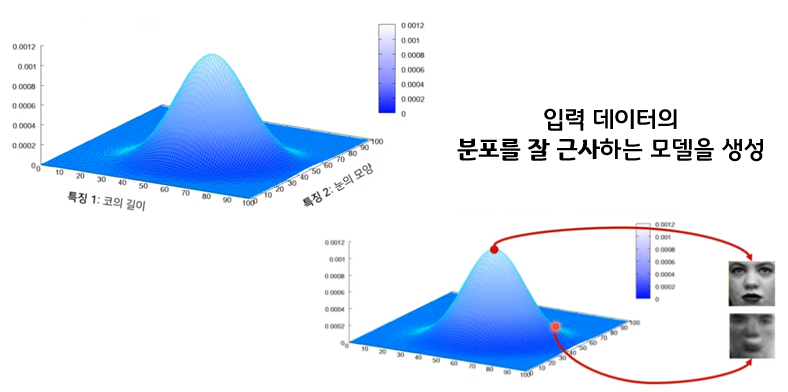
- input image가 들어오면 그 이미지의 다양한 특징들이 각각의 확률변수가 되는 확률분포를 만든다. 이 확률 분포를 잘 찾아내어 확률값이 높은 부분을 사용하면 그럴듯한 새로운 이미지를 생성할 수 있다.
-
이때 각 feature가 가우시안 분포를 따른다고 가정하고 latent 는각 feature의 평균과 분산값을 나타낸다.
-
예를 들어 한국인의 얼굴을 그리기 위해 눈, 코, 입 등의 feature를 Latent vector 에 담고, 그 를 이용해 그럴듯한 한국인의 얼굴을 그려내는 것이다. latent vector 는 한국인 눈 모양의 평균 및 분산, 한국인 코 길이의 평균 및 분산, 한국인 머리카락 길이의 평균 및 분산 등등의 정보를 담고 있다고 생각할 수 있다.
✅️ 수학적 의미
모델의 파라미터 가 주어졌을 때, 우리가 원하는 정답인 가 나올 확률 가 높을 수록 좋은 모델이다. 따라서 를 최대화하도록 파라미터를 학습시킨다.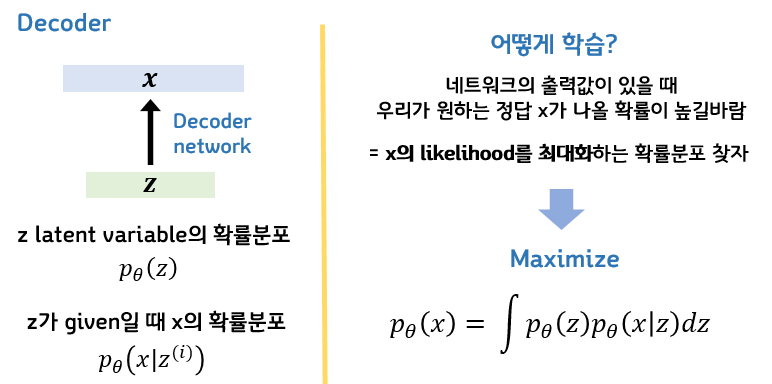
4.3) Variational Autoencoders
과정을 자세히 들여다보자.
- image가 들어왔을 때 는 image의 각 pixel에 대해 알맞는 각각의 가우시안 distribution이다.
- 즉, pixel별로 각각의 를 가진 가우시안 distribution을 갖는다.
그러나 만약 high resolution image라면 이는 매우매우매우 많은 값을 가질 것이다.
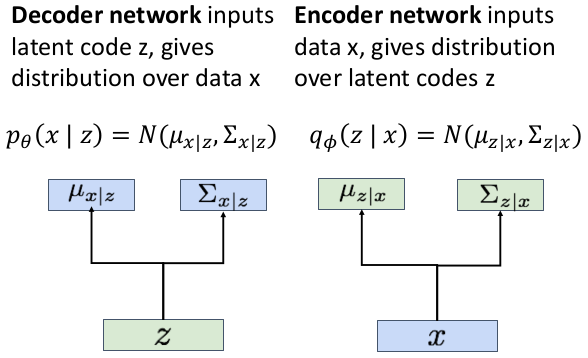
따라서 general Gaussian distribution 대신에 Diagonal Gaussian distribution을 사용한다. 즉, 가 주어졌을 때 generated image의 pixel들 사이의 covariance는 없다. pixel들은 independent하다.
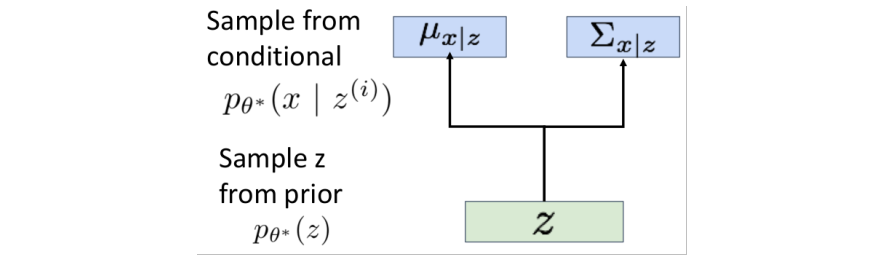
Decoder은 를 입력받아서 mean 와 diagonal covariance 를 출력한다.
그리고 , 를 갖는 Gaussian으로부터 를 sample한다.
✅️ How to train this model?
maximize likelihood of data
만약 우리가 에 대해 를 관측할 수 있다면 conditional generative model 를 학습할 수 있을 것이다. 그러나 를 관측할 수 없으므로 marginalize한다.
- 는
decoder network의 output이므로 계산가능하다. - 는 우리가 정한 가우시안 prior이다.
- 그러나 모든 에 대해 적분하는 것은 불가능하다.
따라서 베이즈 정리를 사용한다
- 와 는 계산가능하다.
- 그러나 는 계산할 방도가 없다. (어떻게 생성하지도 않은 image가 주어짐을 가정할 수 있나.)
따라서 또다른 network(encoder) 를 도입한다.
새로운 네트워크 encoder은 위의 식을 학습한다.
따라서
위의 사실들을 조합하여 를 근사할 수 있다. 아래는 그 과정인데 이 식을 도저히 이해하기가 너무 힘들다. 언젠가 이해할 날을 기대하며 적어본다.
We can wrap in an expectation since it doesn't depend on z
마지막 식에서
- 첫번째 term : Data reconstruction
- 두번째 term : KL divergence between prior, and samples from the
encodernetwork - 세번째 term : KL divergence between
encoderand posterior ofdecoder
그러나 세번째 term은 구할 수 없음. 하지만 KL은 항상 양수의 값을 가지므로 이는 likelihood의 lower bound를 구할 수 있게 해준다.
이를 통해 encoder과 decoder를 jointly하게 학습시켜서 data likelihood의 variational lower bound를 최대화시키는 방향으로 학습시킨다.
진자 VAE는 너무 이해하기가 힘들었고 공부하기도 힘들었다. 19강 강의 하나 보는데 6시간은 걸린 것 같다.. 그런데도 아직 정확히 이해하지 못한 것 같아서 좀 자괴감이 온다....