CS231N, EECS 498-007 / 598-005에서 나타나는 개념을 정리하기 위하여 복기용도로 작성하였습니다.
간단히 정리한 내용을 살펴보며 모르는 부분이 있을 때 찾아보는 용도로 보시면 좋을 것 같습니다.
Convolutional Neural Networks (CNNs / ConvNets)
-
ordinary Neural Networks과 관계
- 공통점
- 학습 가능한 가중치(weight)와 바이어스(bias)로 구성
- 각 뉴런은 입력을 받아 내적 연산(dot product)을 한 뒤 선택에 따라 비선형(non-linear) 연산
- 마지막 레이어에(SVM/Softmax와 같은) 손실 함수(loss function)을 가지며, 우리가 일반 신경망을 학습시킬 때 사용하던 각종 기법들을 동일하게 적용할 수 있다.
- 차이점
- ConvNet 아키텍쳐는 입력 데이터가 이미지라는 가정 덕분에 이미지 데이터가 갖는 특성들을 인코딩 할 수 있다.
- 네트워크를 학습시키는데 필요한 모수 (parameter)의 수를 크게 줄일 수 있게 해준다.
- 공통점
-
특징
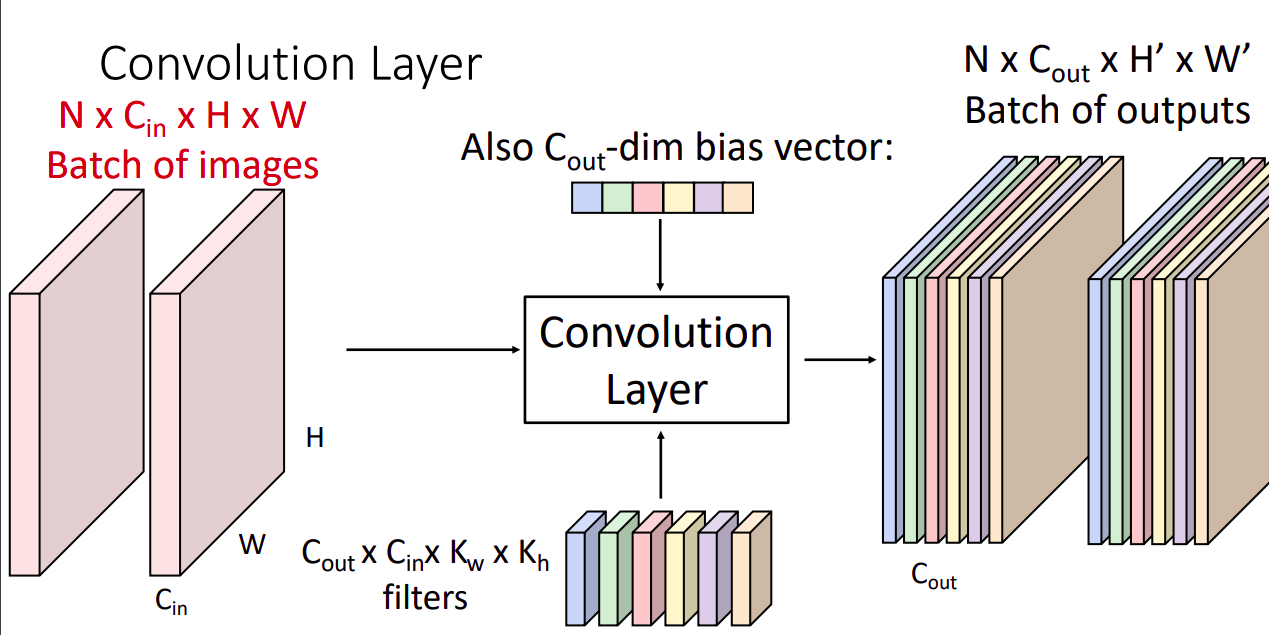
- ConvNet 아키텍쳐에서는 크게 컨볼루셔널 레이어, 풀링 레이어, Fully-connected 레이어라는 3개 종류의 레이어가 사용된다.
- 각 레이어는 3차원의 입력 볼륨을 미분 가능한 함수를 통해 3차원 출력 볼륨으로 transform시킨다.
- 모수(parameter)가 있는 레이어도 있고 그렇지 않은 레이어도 있다 (FC/CONV는 모수를 갖고 있고, RELU/POOL 등은 모수가 없음).
- 초모수 (hyperparameter)가 있는 레이어도 있고 그렇지 않은 레이어도 있다 (CONV/FC/POOL 레이어는 초모수를 가지며 RELU는 가지지 않음).
- 레이어의 각 뉴런을 입력 볼륨의 로컬한 영역(local region)에만 연결할 것이다. 이 영역은 리셉티브 필드 (receptive field, filter size와 동일한 의미)라고 불리는 초모수 (hyperparameter) 이다
- 왜 CONV 레이어에 stride 1을 사용할까? 보통 작은 stride가 더 잘 동작한다. 뿐만 아니라, stirde를 1로 놓으면 모든 spatial 다운샘플링을 POOL 레이어에 맡기게 되고 CONV 레이어는 입력 볼륨의 깊이만 변화시키게 된다.
- 왜 (제로)패딩을 사용할까? CONV 레이어를 통과하면서 spatial 크기를 그대로 유지하게 해준다는 점 외에도, 패딩을 쓰면 성능도 향상된다. 만약 제로 패딩을 하지 않고 valid convolution (패딩을 하지 않은 convolution)을 한다면 볼륨의 크기는 CONV 레이어를 거칠 때마다 줄어들게 되고, 가장자리의 정보들이 빠르게 사라진다.
Q: What happens if we stack two convolution layers?
FC layer때와 마찬가지로() 다른 형태의 conv layer가 된다.
층을 쌓기 위해서는 레이어 사이에 activation layer를 추가한다.
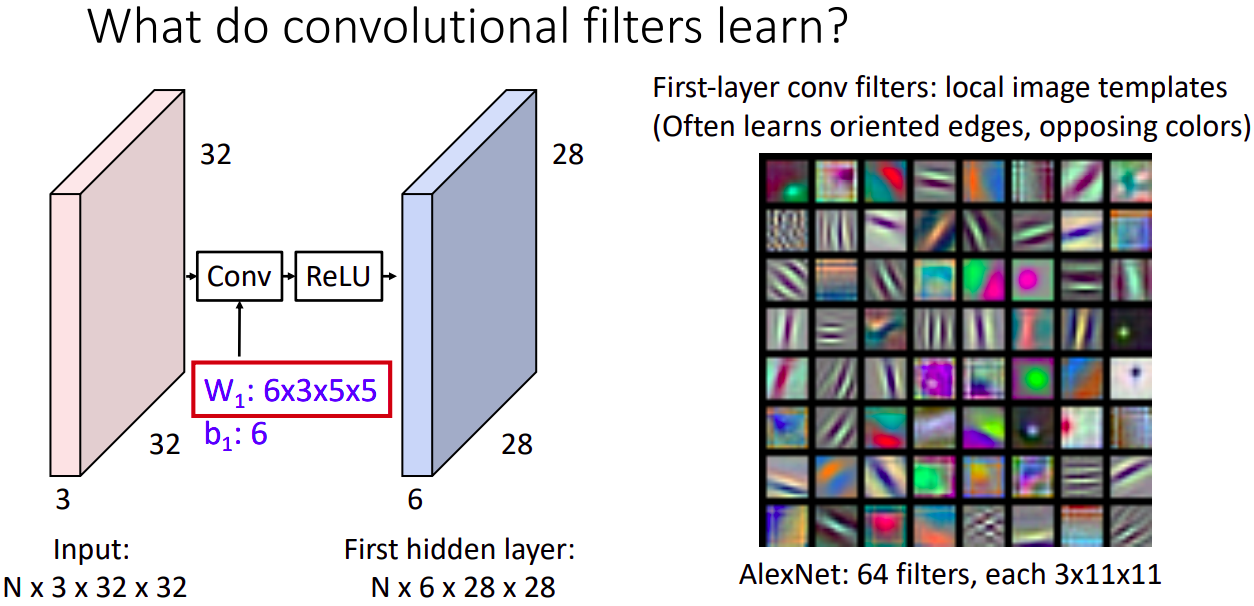
Q: conv layer 는 무얼 배우나?
A: 첫번째 레이어는 보통 edge의 방향이나 반대되는 색을 나타낸다.
Q: 필터를 계속 먹이면서, Input image를 보존하고 싶은데, 이미지 사이즈가 줄어드는 단점이 있다. 결과적으로 표현되는 픽셀 수가 줄어들어, 다양한 패턴들이 줄어드는 문제가 생긴다.
A: activation map의 사이즈가 계속 줄어드는 단점을 해결하기 위한 방안으로는 padding이 있다. Padding이란 Input 이미지 주변에 0 픽셀을 두르는 것이다. 그렇다면 Padding을 몇으로 설정할 것인지도 정해야한다. 주로 input과 같은 크기의 output을 내기 위해, (K -1) / 2로 패딩값을 정한다.
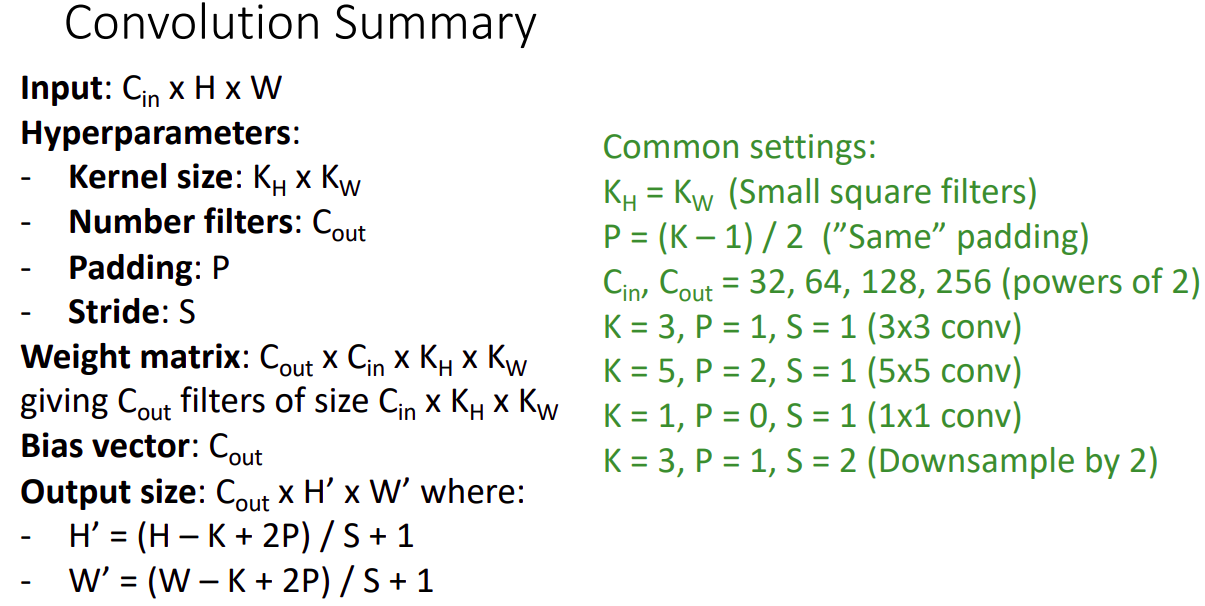
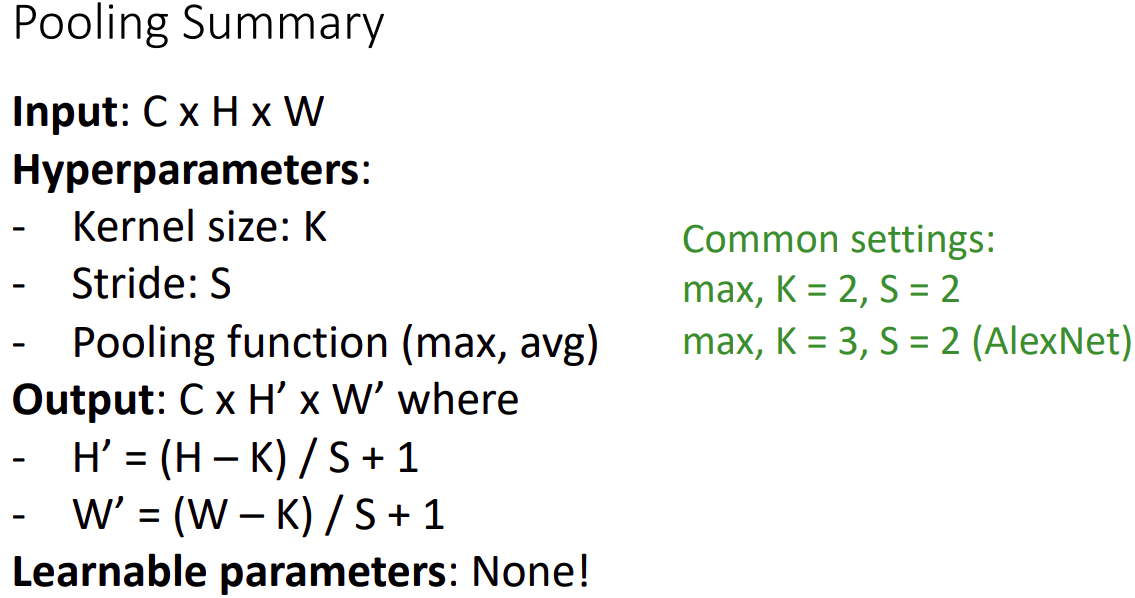
출력 크기와 보편적 세팅 값은 알아두면 좋은 내용이다.
Q: input volume: 3 x 32 x 32, 10 5x5 filters with stride 1, pad 2
A: Output size
- Output volume size
- (32 + 2 x 2 - 5)/1 + 1 = 32 spatially, so 10 x 32 x 32
- Number of learnable parameters: 760
- Parameters per filter: 3 x 5 x 5 + 1 (for bias) = 76,
- 10 filters, so total is 10 x 76 = 760
- Number of multiply-add operations: 768,000
- 10 x 32 x 32 = 10,240 outputs
- each output is the inner product of two 3(입력 채널) x 5 x 5(커널 사이즈) tensors (75 elems)
- total = 75 x 10240 = 768K
receptive field
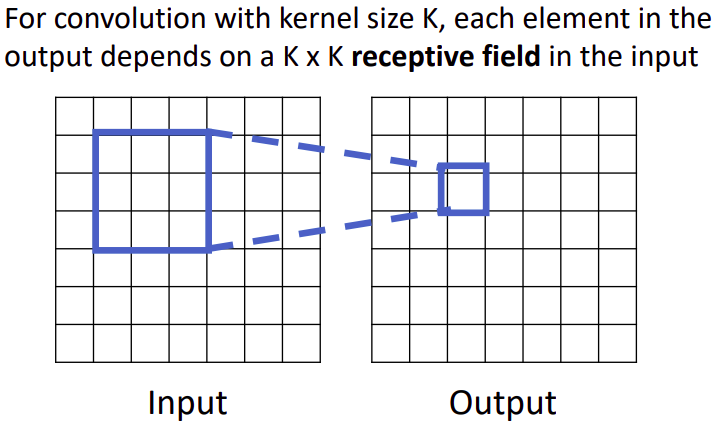
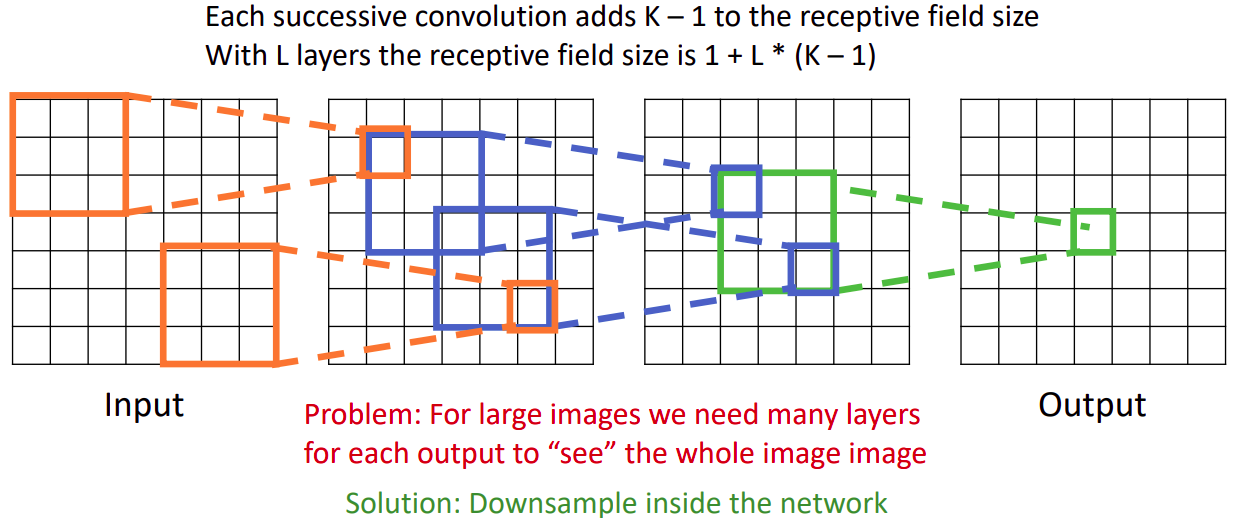
- output의 한 칸을 생성하기 위해서, 필터가 적용된 영역을 receptive field라고 한다.
- 연속적인 RF는 RF size에 K-1만큼 곱해준다.L-th layer의 RF size는 1+L*(K-1)이다.
Q: "receptive field in the input” vs “receptive field in the previous layer”
A: 특정 아웃풋의 해당하는 입력값크기(레이어 깊을수록 선형적으로 증가) VS 컨볼루션의 커널사이즈
P: Input 이미지가 커질 때, input 이미지 픽셀 전체를 리셉티브 필터로 가져가려면, 아주 많은 layer가 필요하다.
S: 리셉티브 필드를 넓게 가져가는 다른 방법은 down sample 사용하는 것이다. (stride를 설정하면 깊게 쌓지 않아도 된다.)
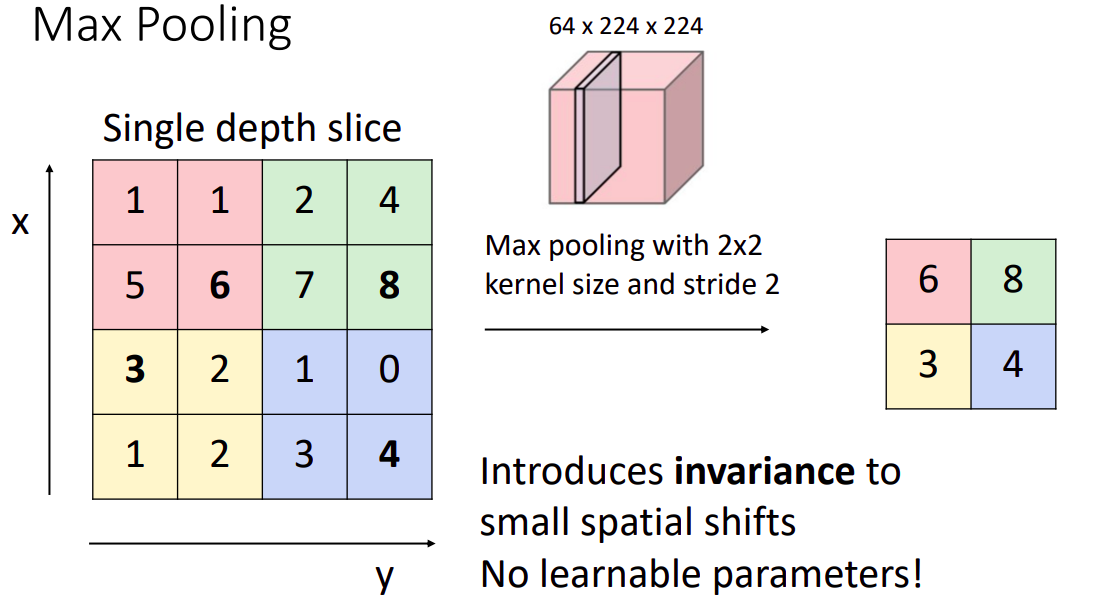
Pooling Layer
- 특징
- ConvNet 구조 내에 컨볼루션 레이어들 중간중간에 주기적으로 풀링 레이어를 넣는 것이 일반적이다.
- 풀링 레이어가 하는 일은 네트워크의 파라미터의 개수나 연산량을 줄이기 위해 representation의 spatial한 사이즈를 줄이는 것이다. 이는 오버피팅을 조절하는 효과도 가지고 있다.
- 풀링 레이어는 MAX 연산을 각 depth slice에 대해 독립적으로 적용하여 spatial한 크기를 줄인다.
- Max 풀링 뿐 아니라 average 풀링, L2-norm 풀링 등 다른 연산으로 풀링할 수도 있다. 최근에는 Max 풀링이 더 좋은 성능을 보이며 더 많이 쓰인다.
- 최근에는 representation의 spatial한 사이즈를 줄이기 위해 CONV 레이어에서 더 큰 stride를 사용하며, VAE(variational autoencoder) 또는 GAN(Generative Adversarial Network)과 같은 모델을 훈련하는 데 풀링을 없애는 것이 좋은 성능을 나타내었다. 미래의 아키텍처에는 풀링 레이어가 거의 또는 전혀 없을 것 같습니다.
Batch Normalization
개요
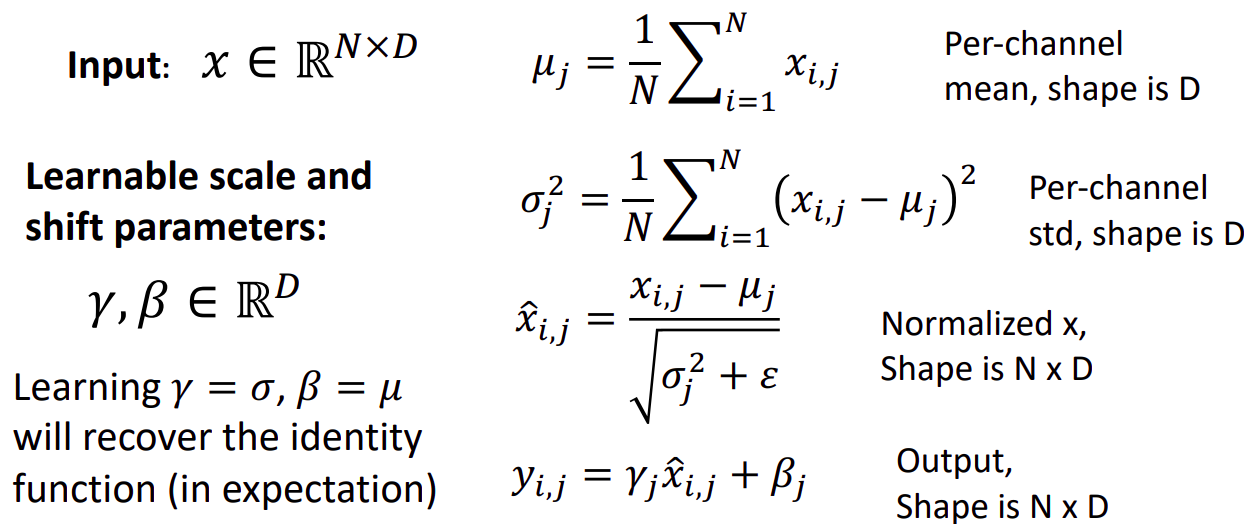
- the outputs of a layer를 Normalize 함으로 zero mean and unit variance를 갖는다.
- 왜 하나면 “internal covariate shift”(직전 레이어가 최적화 됨에 따라 그 결과값의 분포가 차이난다. 따라서 직후의 레이어의 학습에 영향을 준다.)를 줄여준다. 이를 통해 stationary(standardized) distribution한 입력값을 갖게 만들어 improves optimization.
- We can normalize a batch of activations like this:
- 이 과정은 미분가능한 함수를 사용함으로(differentiable function) 네트웍의 연산자로 사용할 수 있어 backprop이 가능하다.
- 직전 레이어가 최적화 됨에 따라 그 결과값의 분포가 차이가 심할 수 있다. 이를 0을 평균으로하고 분산이 1인형태로 분포를 조정하여 학습기간 동안 stationary(standardized) distribution한 입력값을 갖게 만든다.
- 위 과정을 통해 최적화 프로세스를 stablize & accelerate 하는 효과가 있길 희망?한다. 아마 다음 수업에서 관련된 내용을 들을 수 있다고 합니다.
특징
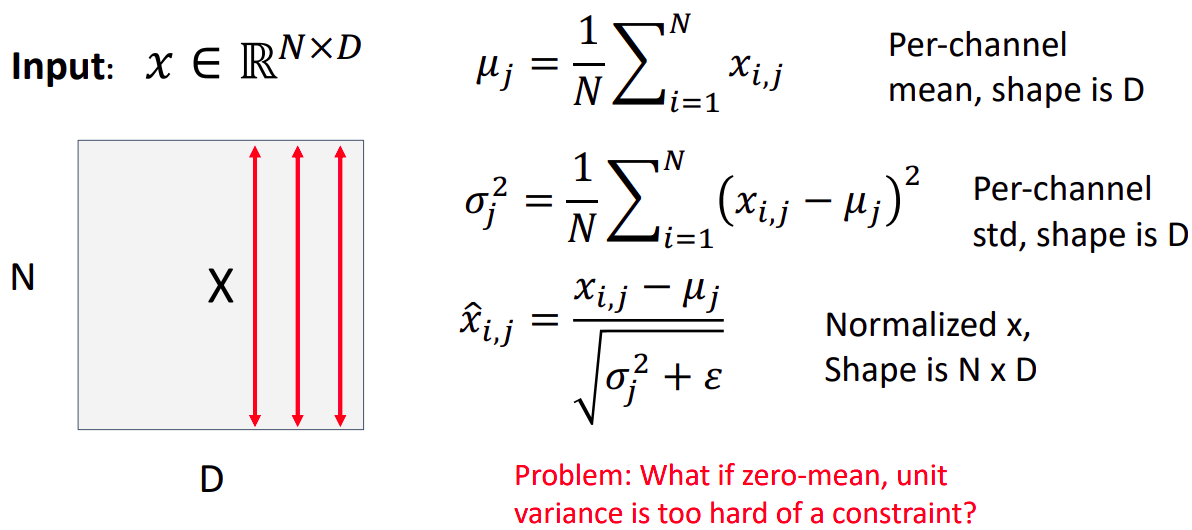
Q: zero mean and unit variance를 만들기 힘들때는 어떻게 해?
A: 새로운 파라미터인 감마&베타를 출력 값을 조정하는 scale&shift 용도로 설정한다.
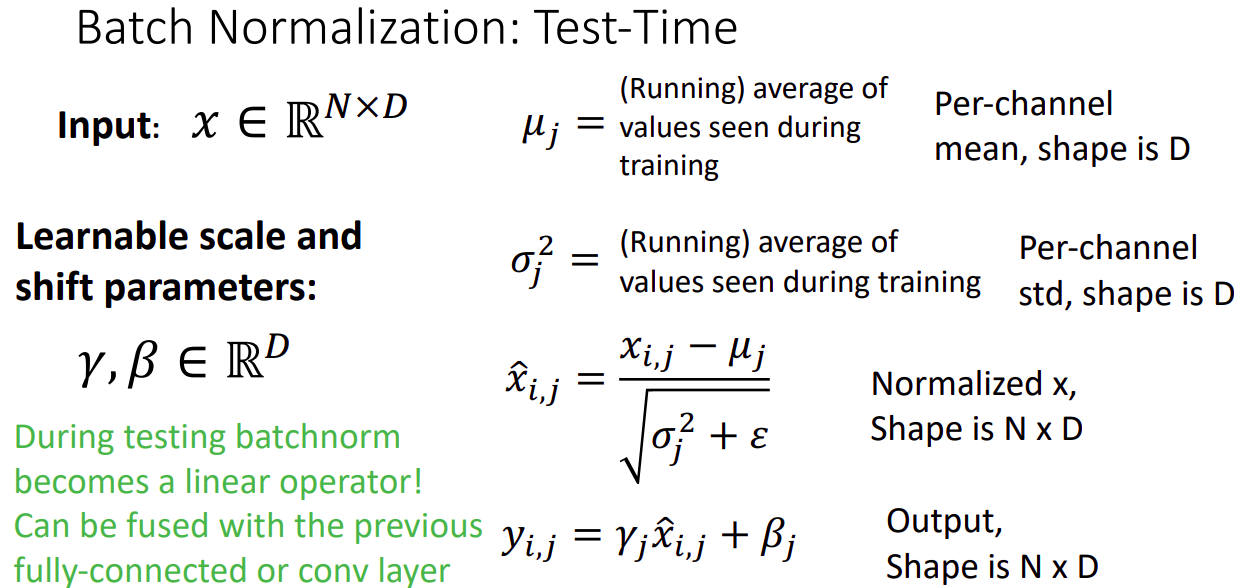
Q: Estimates depend on minibatch; can’t do this at test-time!
A: 학습 할 때의 사용한 평균과 분산 값의 평균을 그대로 사용한다. 따라서 수행과정이 linear하게 연산되어(단순히 상수값을 사칙연산하고 학습된 감마와 베타값을 쓰기때문) computational overhead가 0이 된다.
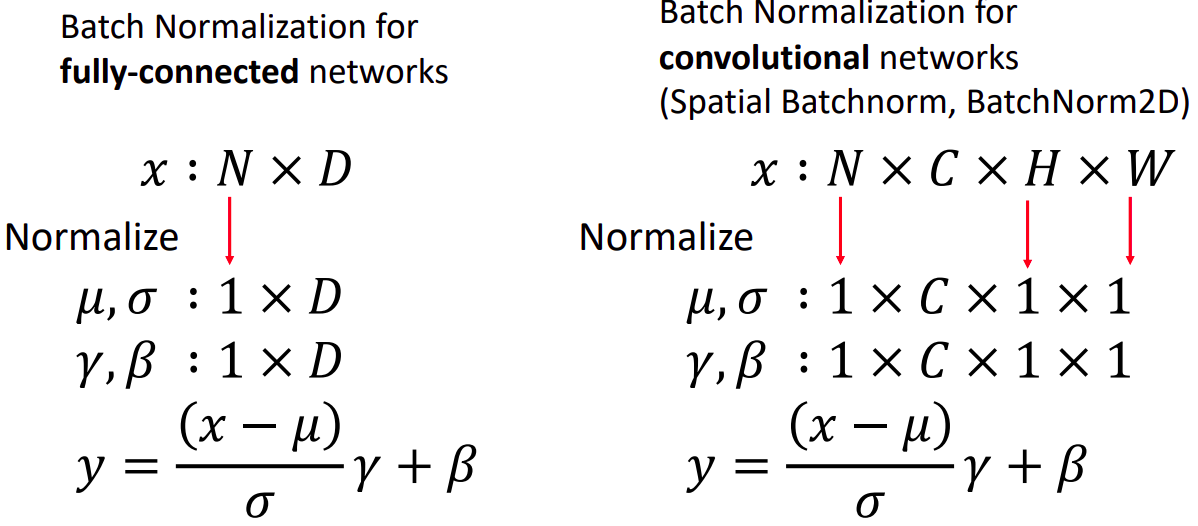
FC 레이어에서는 batch 단위의 Normalization를, CONV 에서는 batch&spatial 단위의 Normalization를 수행한다.
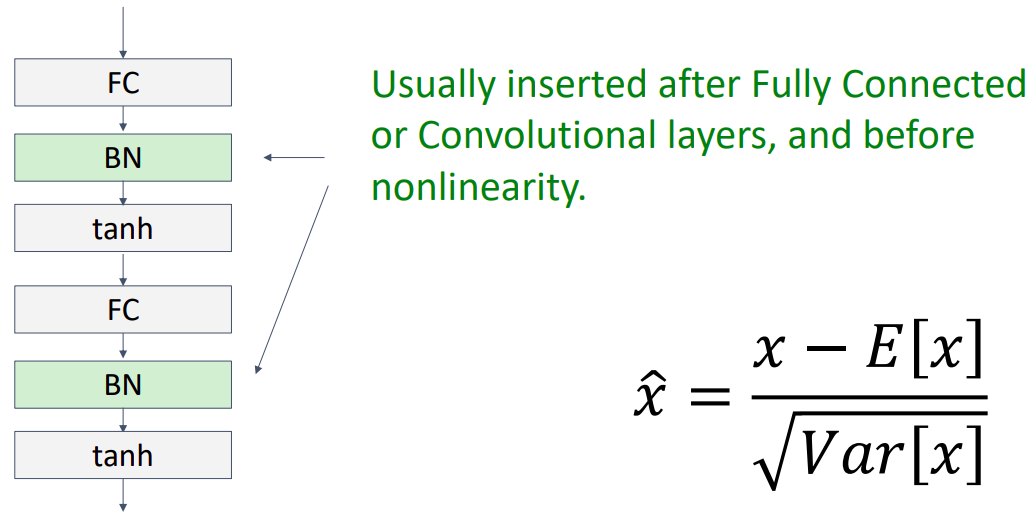
그림과 같이 보통 FC, CONV 레이어 뒤에 그리고 nonlinearity 앞에 위치함을 볼 수 있다.
- 장점
- Makes deep networks much easier to train!
- Allows higher learning rates, faster convergence
- Networks become more robust to initialization
- Acts as regularization during training
- Zero overhead at test-time: can be fused with conv!
- 단점
- Not well-understood theoretically (yet).
(저스틴은) 이론적으로 정확한 설명과 증명이 덜 되었다도 합니다. - Behaves differently during training and testing: this is a very common source of bugs!
데이터의 imbalance 혹은 train & test mode 설정에 문제가 있을 경우 버그가 잘 발생한다고 합니다.
- Not well-understood theoretically (yet).
Layer Normalization
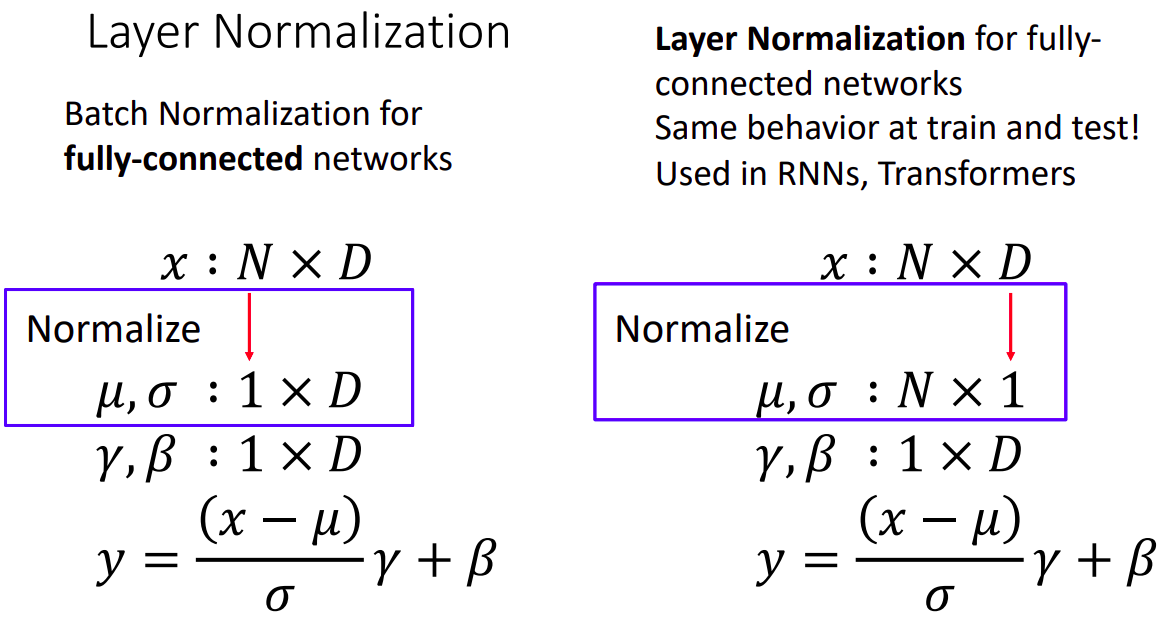
- BN이 train time과 test time에 동작 과정이 다르게 수행되는것이 문제점으로 시작
(테스팅 시에 특정 레이어의 모드가 다르게 동작하는것이 다른 레이어에 비 생산적이게 작동하여 문제라고 합니다.) - 따라서 batch dimension의 평균을 구하는 것이 아닌 feature dimension의 평균을 구함으로서 다른 batch에 의존적이지 않게 동작하기 때문에 train & test time시 동작과정이 동일하다고 합니다.
- RNN, Transformer에서 주로 사용됨
Instance Normalization
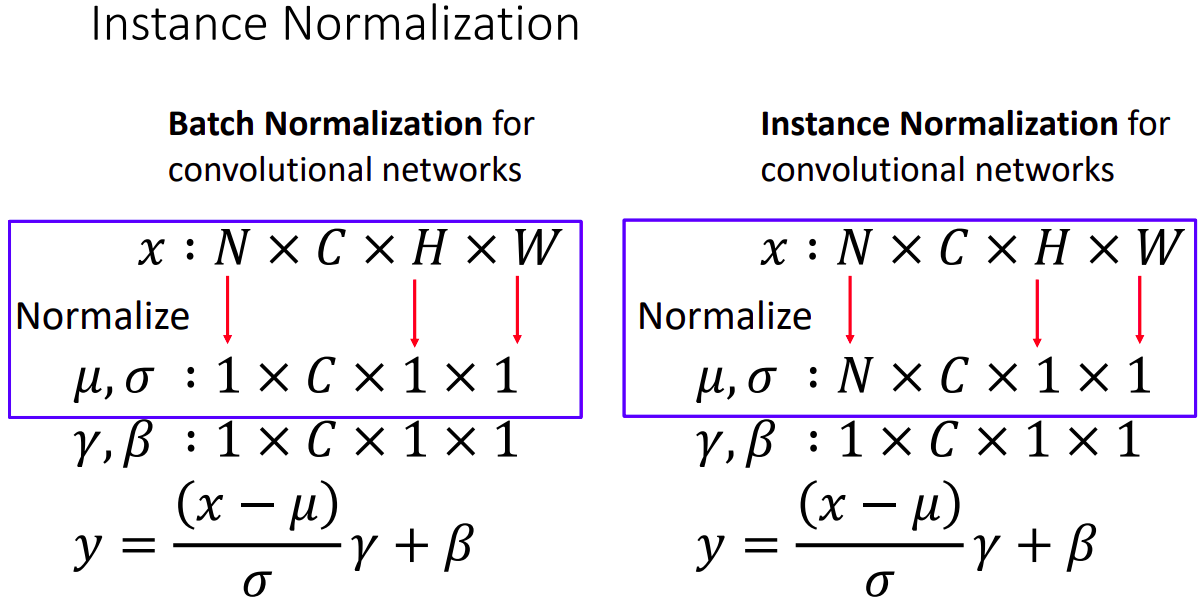
- CONV 레이어에서도 같은 문제점을 해결하기 위해 batch와 spatial dimension의 normalize 대신 spatial dimension(H,W) 만 normalize함으로 train & test time시 동작과정이 동일하다고 합니다. (batch에 의존적이지 않게 동작하기 때문에)
Group Normalization & Summary
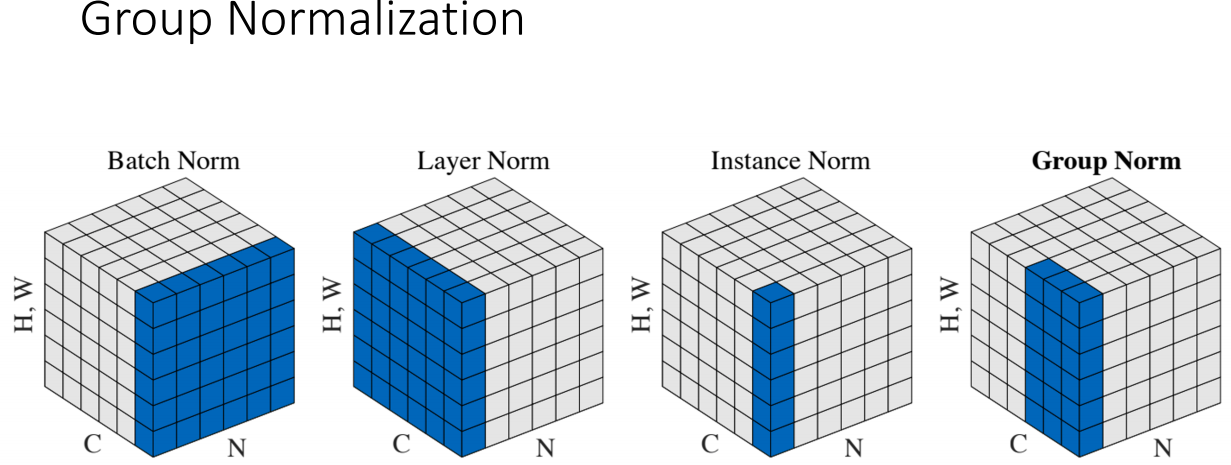
batch dimension : N
channel dimension : C
spatial dimension : H, W
- batch Norm: average over batch & spatial dimension
- Layer Norm: average over channel & spatial dimension
- Instance Norm: average over channel dimension
- Group Norm: channel dimension을 몇가지 그룹으로 나누어 그룹단위의 norm을 적용한다.
최근 Object detection에서 사용됨
참고자료
cs231n 강의 자료
cs231n 한글 강의 자료
EECS 498-007 / 598-005 2019 강의 자료
읽을 거리
