컴퓨터 비전의 어려운점
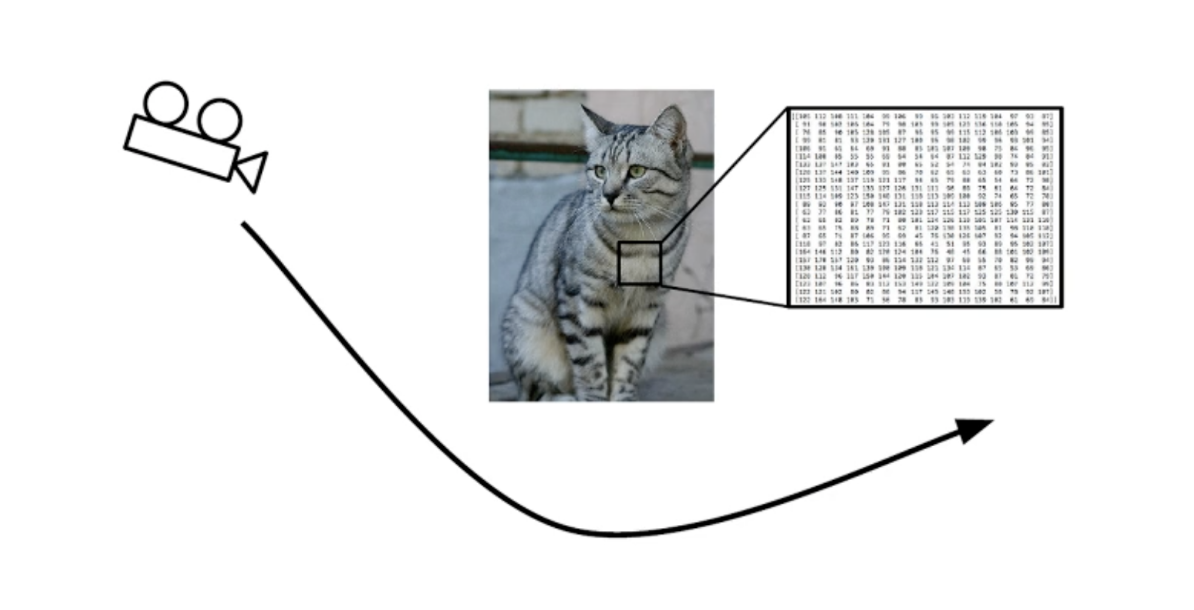
- 정해진 물체가 움직이면 전체적인 픽셀값 변경됨
- 경계색이 모호한경우 구분이 어려움
- 밝기, 조명에 따라서 강조되는 포인트 다름
- 일부가 가려진 영상 분류 어려움
컨볼루션층
- 선형함수인 컨볼루션과 비선형 함수인 활성함수의 조합
풀링층(POOL)
- 컨볼루션의 얻어진 특징을 통계적으로 압축
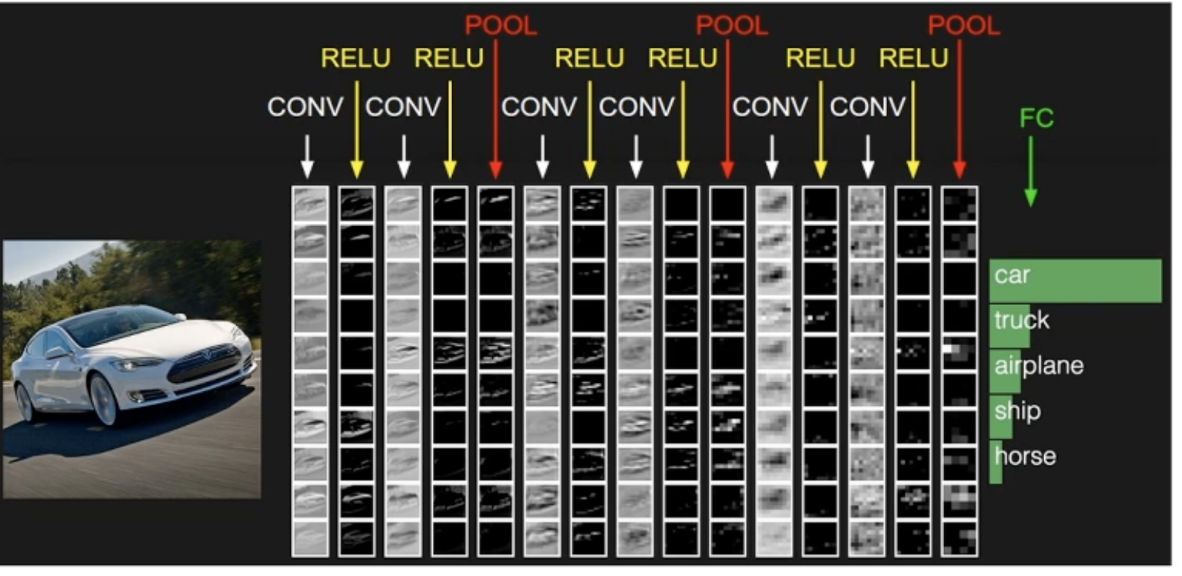
전체적으로 결합해 층을 쌓고 사용
DMLP 와 CNN
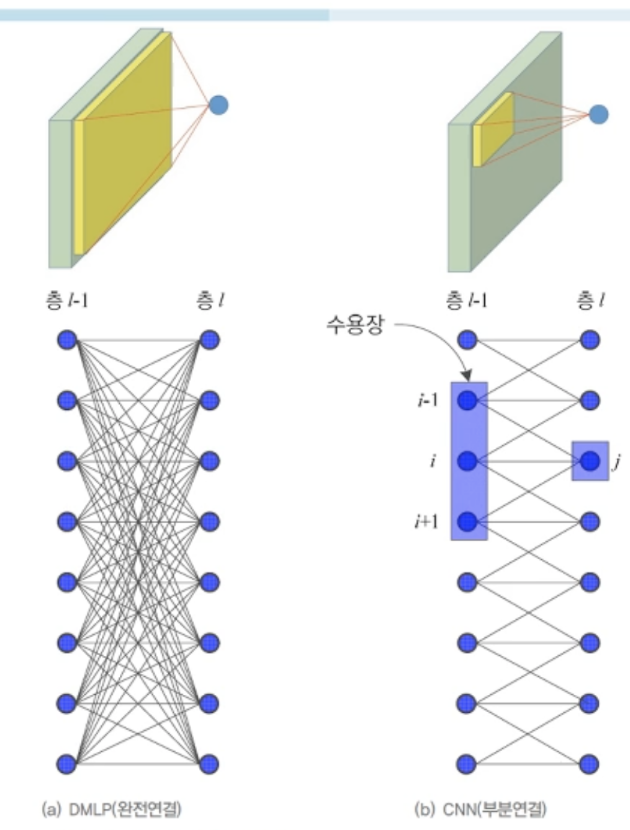
DMLP
- 완전연결 구조로 복잡도 높음
- 학습 느리고 과잉적합문제 발생
CNN
- 부분 연결이기 때문에 복잡도 낮음
- 부분에만 가진 특징을 연결된 부분만 가지고 있기 때문에 특징추출 용이
- 격자구조(영상, 음성 등)를 갖는 데이터에 적합
CNN
- 커널들을 통해 특징 추출: CONV
- 커널 보폭을 조정하거나 풀링층에서 커널 보폭을 조절해 특징 맵 크기를 조절

커널이 움직이면서 특징맵을 만들어줌
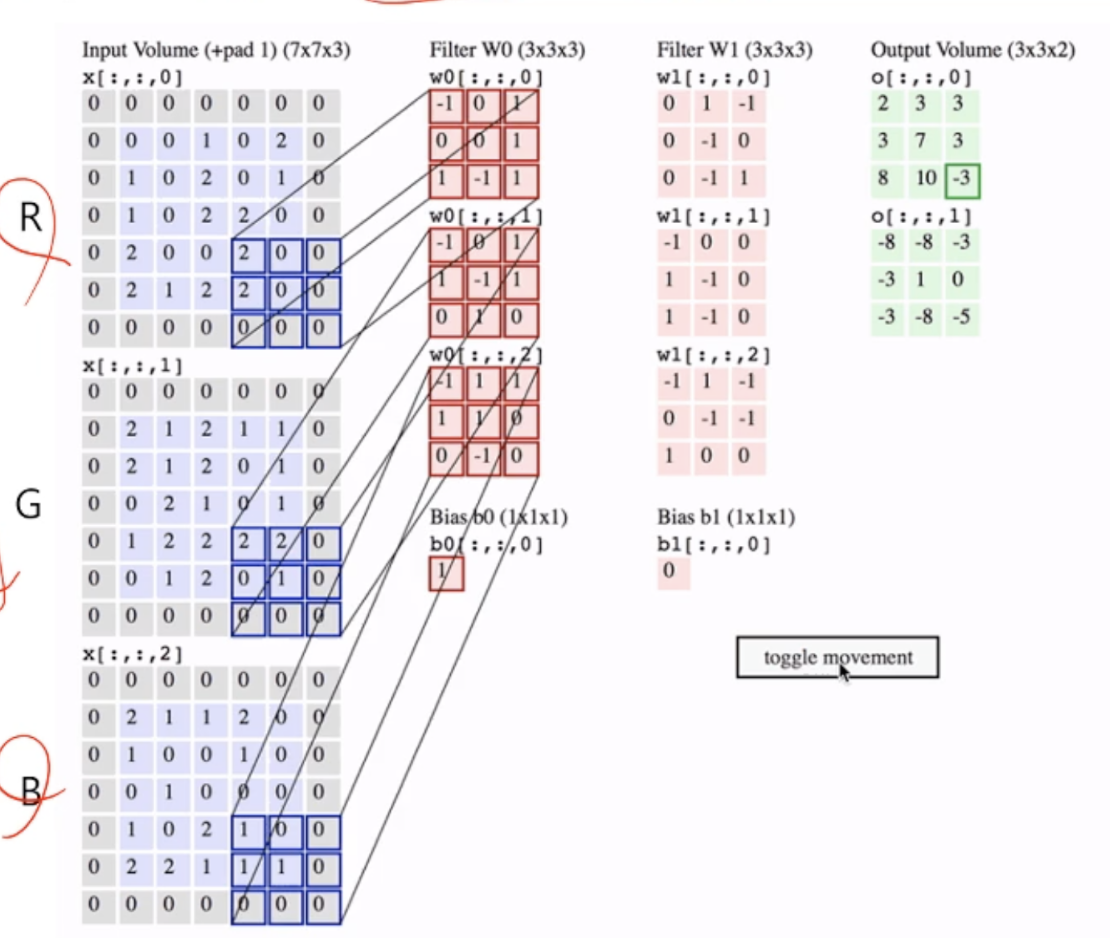
3차원 컨볼루션은 각 차원에 따른 가중치(필터)를 계산
그 결과로 output 가져와줌
수직 수평 특징 컨볼루션
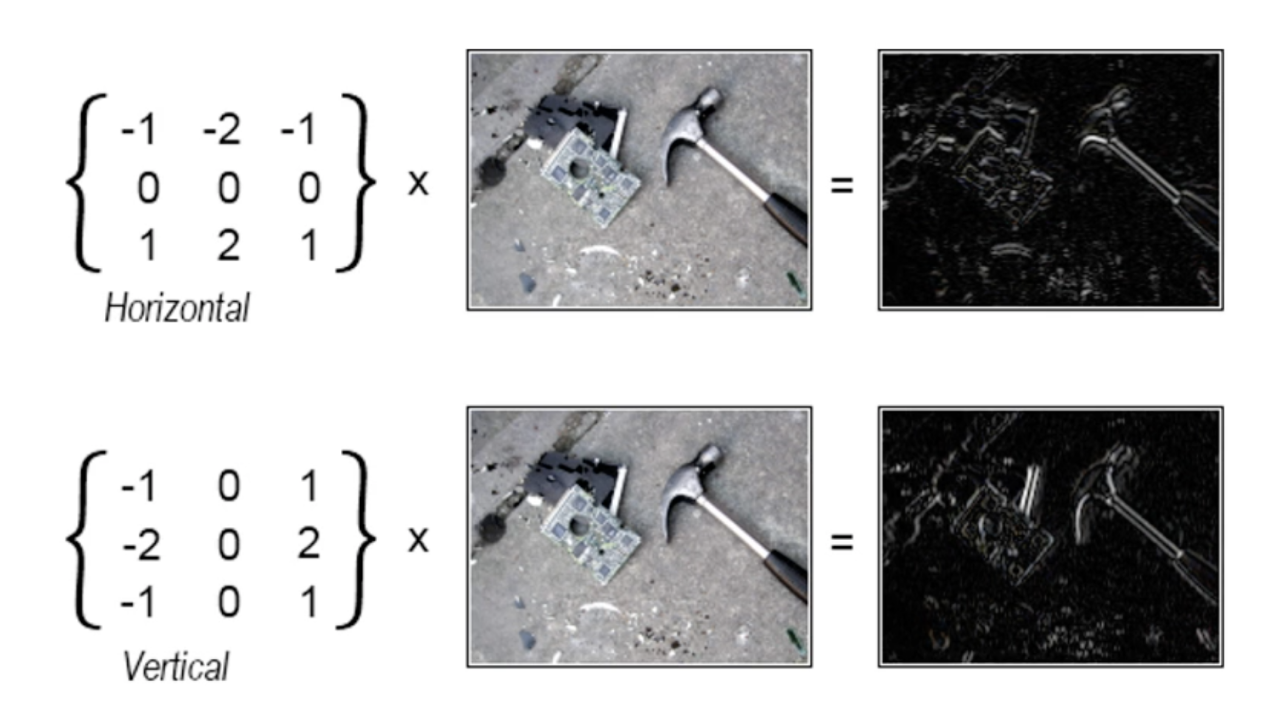
- 수직과 수평 각각의 특징을 추출해 특징맵 만듬
- 수직과 수평 각각의 커널이 추출해내는 특징이 서로 다름
활성함수 적용
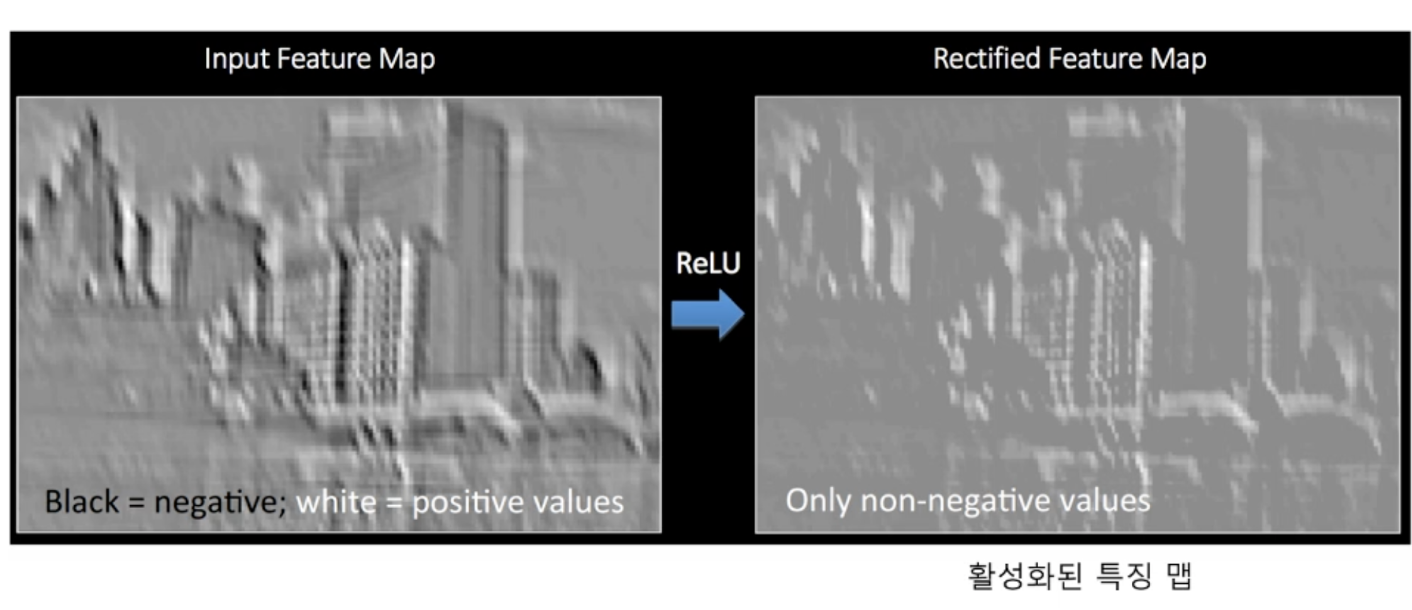
- 활성함수를 통해 특징적인 부분만 남기고 나머지 정보는 0 처리됨
덧대기(padding)
- 커널 연산을 하면 가장자리가 줄어들는 현상 발생
- 덧대기를 통해 원래 형상 유지
편향(bias)추가
- 활성함수를 위해 편향추가
다중 특징 맵 추출
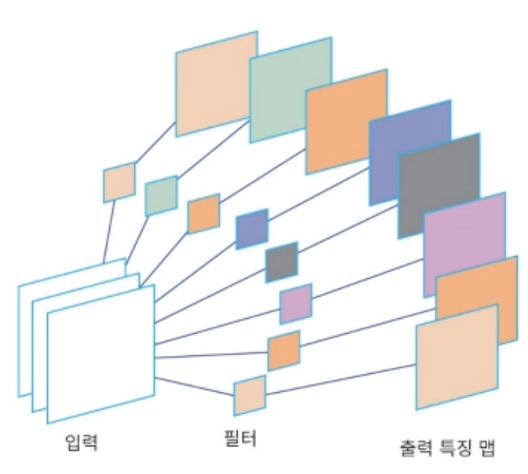
- 한개의 입력에 여러 특징 필터를 통해 출력 특징맵을 추출함
- 이 필터도 사람이 설계하지 않고 학습으로 찾아냄

컴퓨터가 좋아