
✔️ Introduction
Seq2Seq는 RNN 계열의 모델을 사용해 sequential하게 데이터를 처리할 수 있어, 기존 DNN 모델보다 기계 번역에 유리하게 작용해왔습니다. 다만 이전 시점에서 정보를 연속적으로 받아 출력을 생성하는 방식은 몇 가지 문제가 존재했습니다.
-
sequential한 연산으로 병렬화가 되지 않는다.
-
context vector가 고정 차원이라 문맥에 손실이 발생한다.
-
long term dependency problem
위와 같은 문제를 해결하기 위해 ELMo나 bi-LSTM, Attention 등 여러 방법론이 제시되었고, 그 중 Attention을 기반으로 한 seq2seq는 2번과 3번의 문제를 다소 해결하였습니다. 하지만 구조 자체가 sequential한 연산을 요구하기에 효율적인 계산이 이뤄지지는 못했습니다. 따라서 논문에서는 transformer라는 Attention으로만 이뤄진 모델을 제안하여 병렬 처리를 가능하게 했습니다.
✔️ Model Architecture
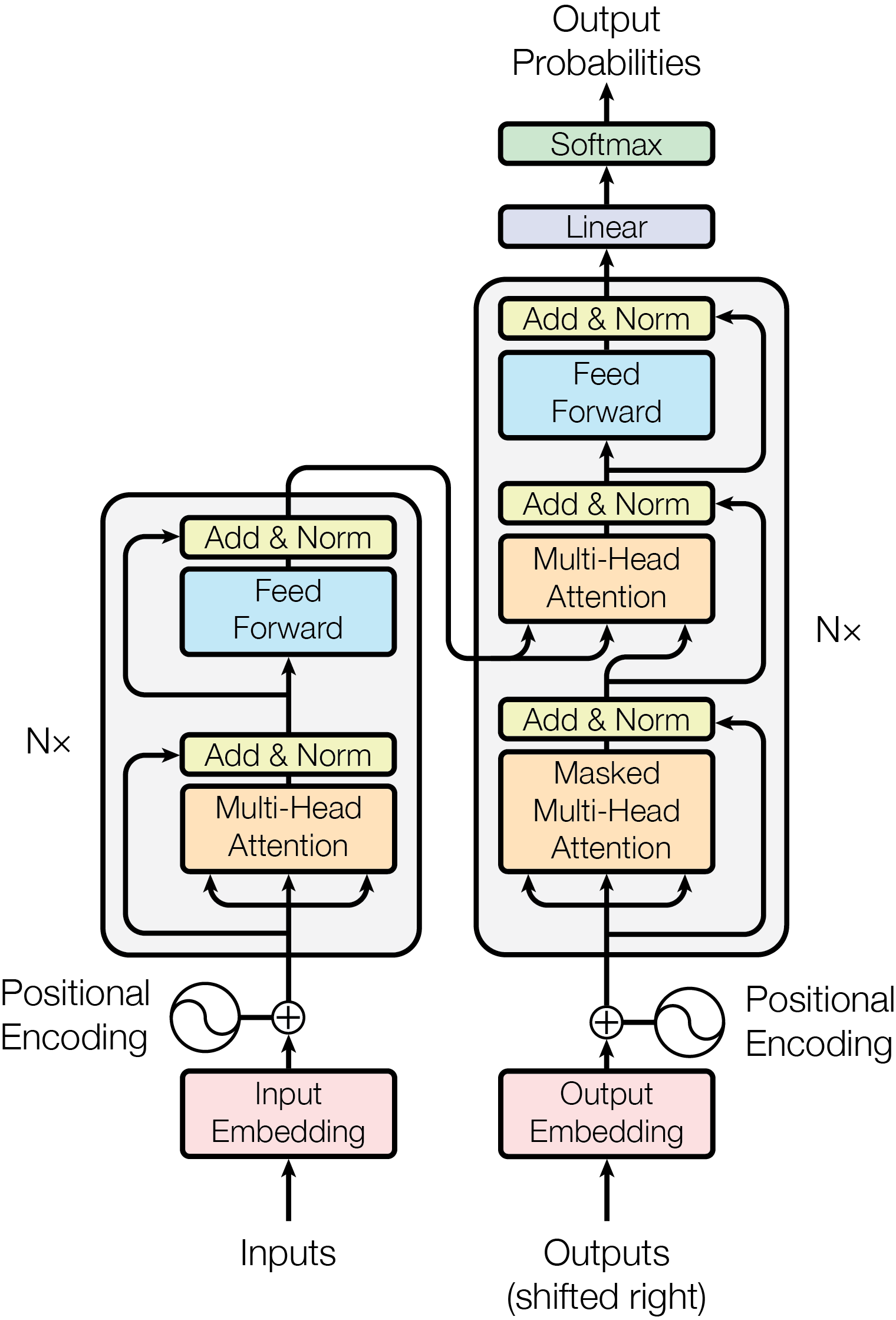 모델 아키텍쳐는 기존 Seq2Seq에서 차용된 encoder & decoder 구조로 이뤄져 있습니다. 본격적으로 살펴보기 전에 논문에서 사용된 하이퍼 파라미터는 다음과 같습니다. 논문 내 나와있는 순서는 생략되어 있는 부분들이 있어서 input부터 output으로 이어지는 흐름대로 살펴보겠습니다.
모델 아키텍쳐는 기존 Seq2Seq에서 차용된 encoder & decoder 구조로 이뤄져 있습니다. 본격적으로 살펴보기 전에 논문에서 사용된 하이퍼 파라미터는 다음과 같습니다. 논문 내 나와있는 순서는 생략되어 있는 부분들이 있어서 input부터 output으로 이어지는 흐름대로 살펴보겠습니다.
🛠️ 하이퍼 파라미터
(모델 차원)
(레이어 수)
(head 수)
(Feed Forward Network 차원)
💡Embedding Layer
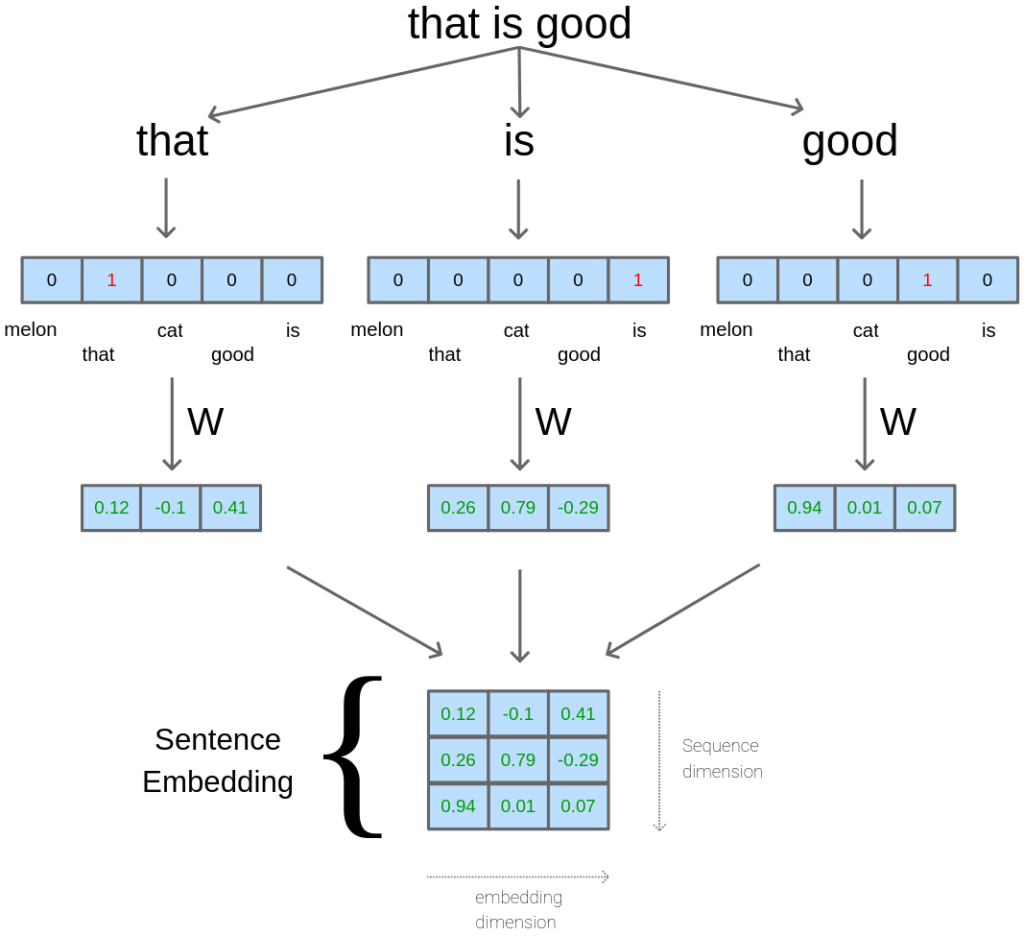
임베딩 레이어에서는 토큰들이 dense vector로 변환됩니다. 각 토큰 당 {1 x } 크기의 랜덤 가중치 벡터로 변환되어 모델의 학습과 함께 학습됩니다.
이때, 모든 토큰 벡터들을 합한 { x } 차원의 가중치 행렬은 encoder, decoder, 또 softmax 함수 전 선형 변환에서도 사용됩니다. 출력의 분산을 조정하기 위해서 로 스케일링해줍니다.
💡 Postional Encoding
transformer는 행렬 단위로 병렬 연산을 수행하다 보니, RNN 계열과 달리 입력 문장의 순서를 고려하지 못합니다. 이는 문장의 순서를 알 수 없기에 성능이 떨어지는 결과를 낳습니다. 따라서 논문에서는 임베딩 벡터 간의 위치 정보를 표현하기 위해 positional encoding을 사용하였습니다.
식은 다음과 같습니다.
논문에서는 설명되어 있지 않지만 추가적으로 설명을 하면 다음과 같습니다.
좋은 positional encoding이기 위해서는 다음을 만족해야 합니다.
- 각 위치의 PE은 결정론적이어야 함
- 데이터의 내용, 길이와 관계 없이 PE는 동일
- 간격이 동일하면 거리는 동일해야함
몇 가지 방법들을 살펴보겠습니다.
🤔 simple indexing
각 위치의 인덱스를 사용하는 방법입니다. 이 경우, 입력이 길어질수록 i값이 커지기 때문에 한계가 존재합니다.
🤔 normalize indexing
값이 커지지 않게 simple indexing에 문장 길이로 나누어 0~1 사이 값으로 만드는 방법입니다. 하지만 데이터의 길이와 관계없이 동일하지 않으므로 한계가 있습니다.
🤔 binary indexing
simple indexing을 이진수로 표현하는 것입니다. 만약 위치가 7이라면 다음과 같습니다.
index 7 = 000111
하지만 0010에서 0011로 변화하는 것과 0011에서 0100으로 변화하는 것은 같은 간격임에도 거리가 다르기 때문에 적합하지 않습니다.
🤔 sinusoidal encoding
사인 함수를 활용하는 방식입니다. 사인 함수는 공역이 -1부터 1까지로 처리가 편하고 연속함수이므로 PE에 활용할 수 있습니다. 하지만 이므로 다른 위치여도 같은 값을 가질 수 있습니다. 때문에 주기를 로 설정하여 차원 수 i에 따른 주기를 조절합니다. i값이 작을 때는 주기가 짧아져서 가까운 위치 차이를 구분하고, 클 때는 주기가 길어져 먼 거리의 위치 정보를 담습니다.
또한, i 위치에서의 PE를 선형 변환했을 때 다른 위치 j에서의 PE를 알 수 있다면 attention이 더 쉽게 위치에 대한 정보를 얻을 수 있습니다.
이러한 translation 성질은 삼각함수의 회전 행렬(rotation matrix)로 표현이 가능합니다.
따라서 PE는
Positional Encoding값은 embedding vector와 더해져 attention의 입력으로 들어옵니다.
💡Multi-head Attention
self-attention
transformer에서는 self-attention이라는 개념을 사용합니다.
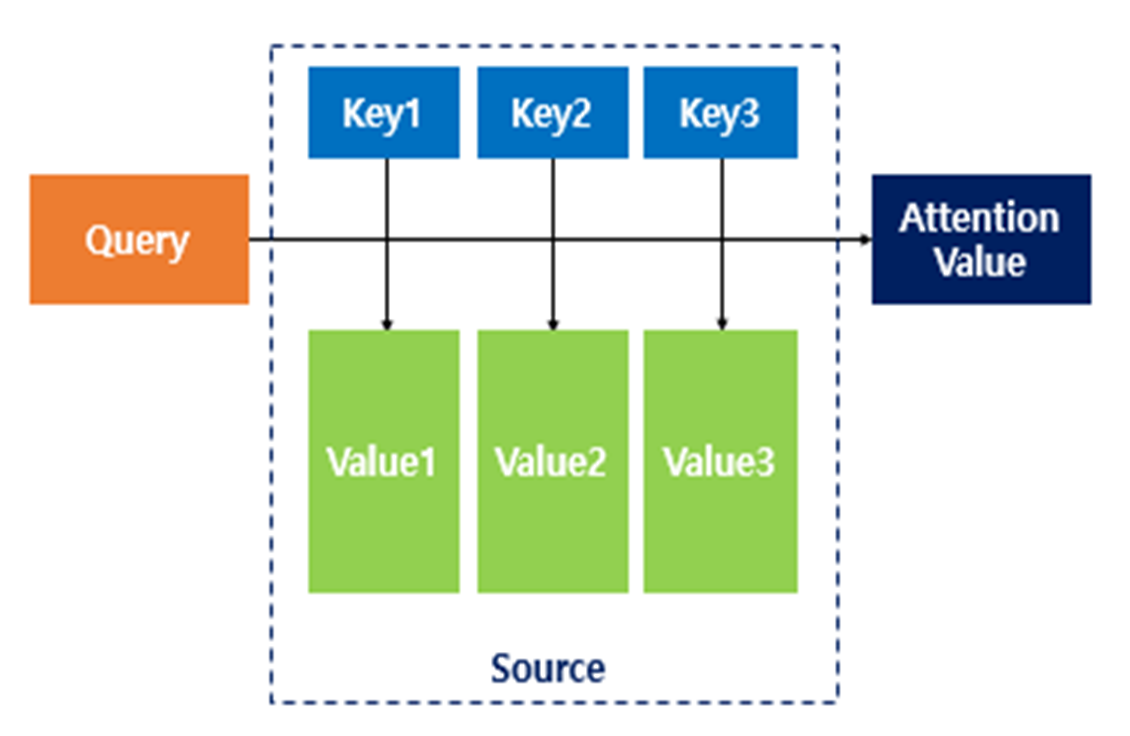
Q: 입력 문장의 모든 벡터
K: 입력 문장의 모든 벡터
V: 입력 문장의 모든 벡터
이처럼 자기 자신을 쿼리로 삼아 참조하는 attention 기법을 self attention이라고 합니다.
Multi-head Attention
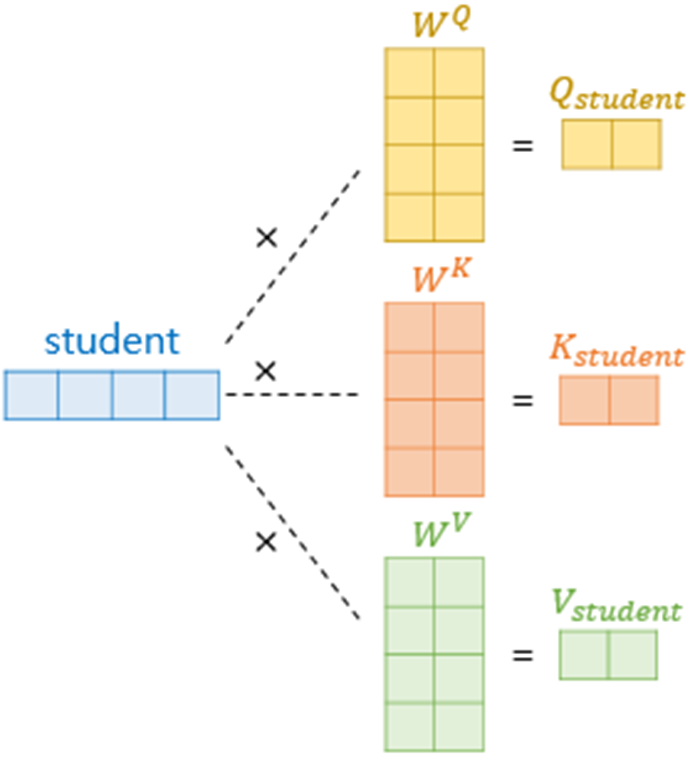
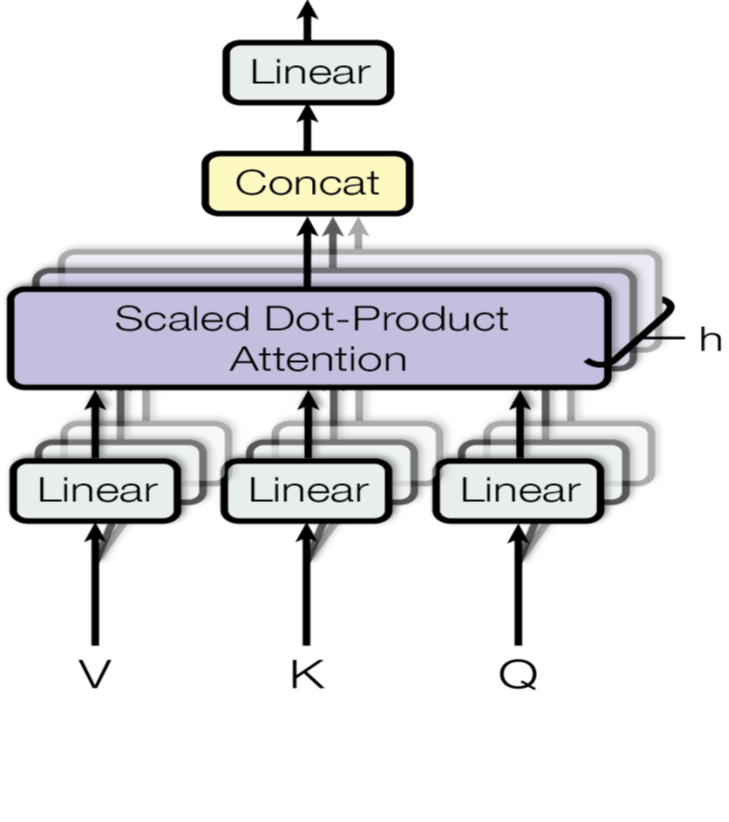 multi-head attention은 입력을 여러 개의 head로 나누어서 각각 어텐션 연산을 진행한 후 concat하는 방식으로 이루어져 있습니다. 이를 위해 $d_{model}$ 차원으로 들어온 입력을 $d_{model} * (d_{model} / h)$ 크기의 가중치 $W$과 곱하여 $d_{model} / h$ 차원으로 만들어 줍니다.
multi-head attention은 입력을 여러 개의 head로 나누어서 각각 어텐션 연산을 진행한 후 concat하는 방식으로 이루어져 있습니다. 이를 위해 $d_{model}$ 차원으로 들어온 입력을 $d_{model} * (d_{model} / h)$ 크기의 가중치 $W$과 곱하여 $d_{model} / h$ 차원으로 만들어 줍니다.
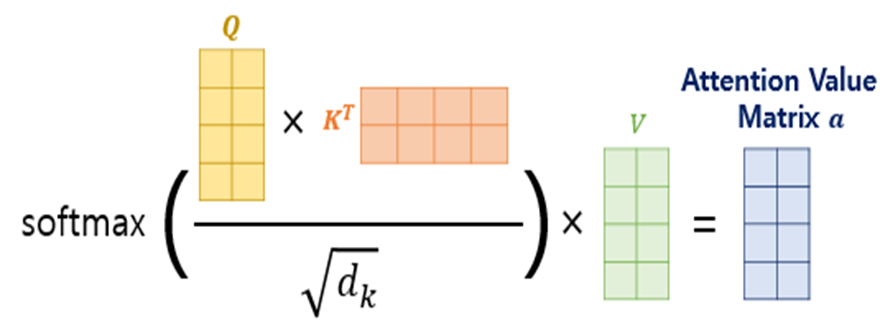
Scaled-dot product
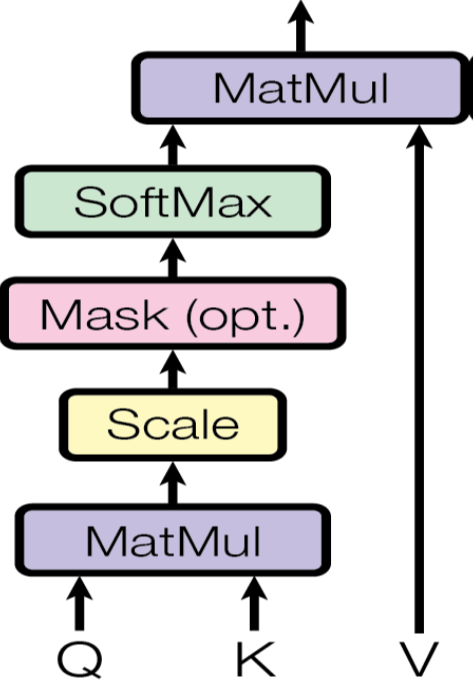 선형변환된 Q, K, V는 scaled-dot product로 attention score를 계산하게 됩니다.
선형변환된 Q, K, V는 scaled-dot product로 attention score를 계산하게 됩니다.
(는 K의 차원)
이때, embedding layer와 비슷하게 로 스케일링을 해주는데 그 이유는 다음을 참조하길 바랍니다.
scaled-dot product에서 scailing을 하는 이유
연산이 완료된 head들은 concat되고, 선형 변환되어 최종 representation을 얻게 됩니다.
앞서 말했듯, transformer는 병렬로 연산하기에 행렬단위로 계산됩니다.
Application of Attention
Multi-head Attention은 transformer 내에서 다음과 같은 곳에 사용됩니다.
-
encoder-decoder를 연결하는 레이어에서 K, V는 encoder의 입력이, Q는 decoder의 입력이 들어옵니다. (cross attention이라고도 합니다.)
-
encoder 자체에도 multi-head attention layer가 들어가 있습니다.
-
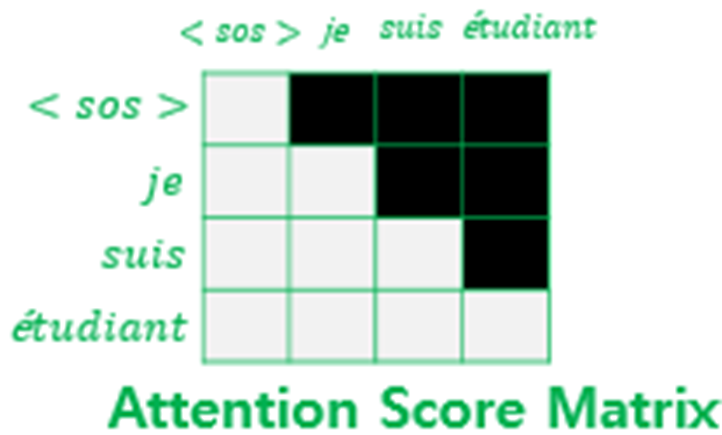
decoder에서 self-attention을 사용하게 되면 미래 시점 위치의 토큰까지 디코더가 학습하게 됩니다. 이는 auto-regressive property를 해치는 것이므로 masking을 하여 미래 시점의 값들을 가려주게 됩니다.
💡 Add & Norm
Add & Norm은 각각 residual connection과 layer normalization을 말합니다.
Residual Connection
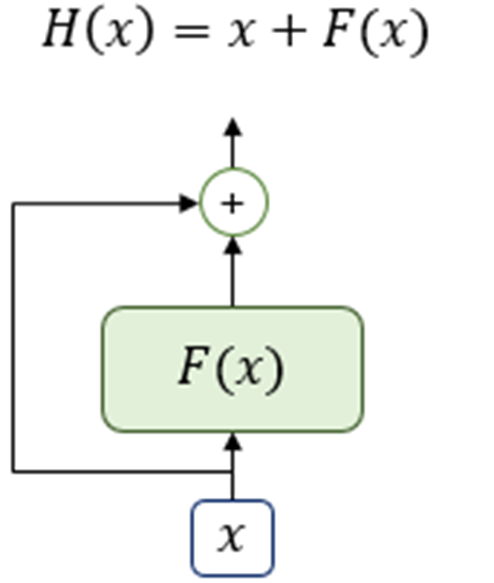
residual connection은 layer를 거친 후 입력과 출력을 더해주는 방식입니다. 이를 통해 학습이 진행되어도 값이 줄어들어 기존의 입력을 잃어버리는 일을 방지할 수 있게 되었습니다.
Layer normalization
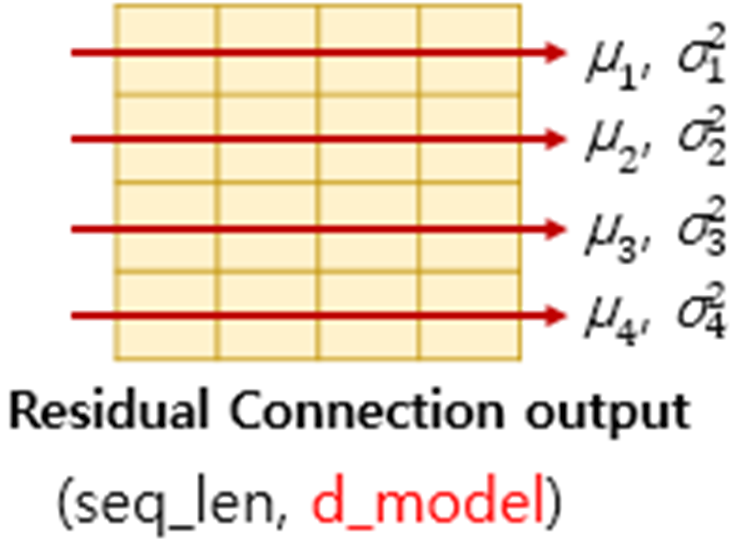
layer normalization은 행렬 내에서 열 방향으로 평균 및 분산을 구하고 정규화를 진행하는 것을 말합니다. 여기서는 방향으로 정규화가 이뤄집니다.
💡 Position-wise Feed-Forward Networks
선형 변환을 해준 후 비선형 함수를 거칩니다. 로 높은 차원에서 다시 로 줄여가는 과정과 ReLU로 모델의 표현력을 높입니다.
💡 Flow
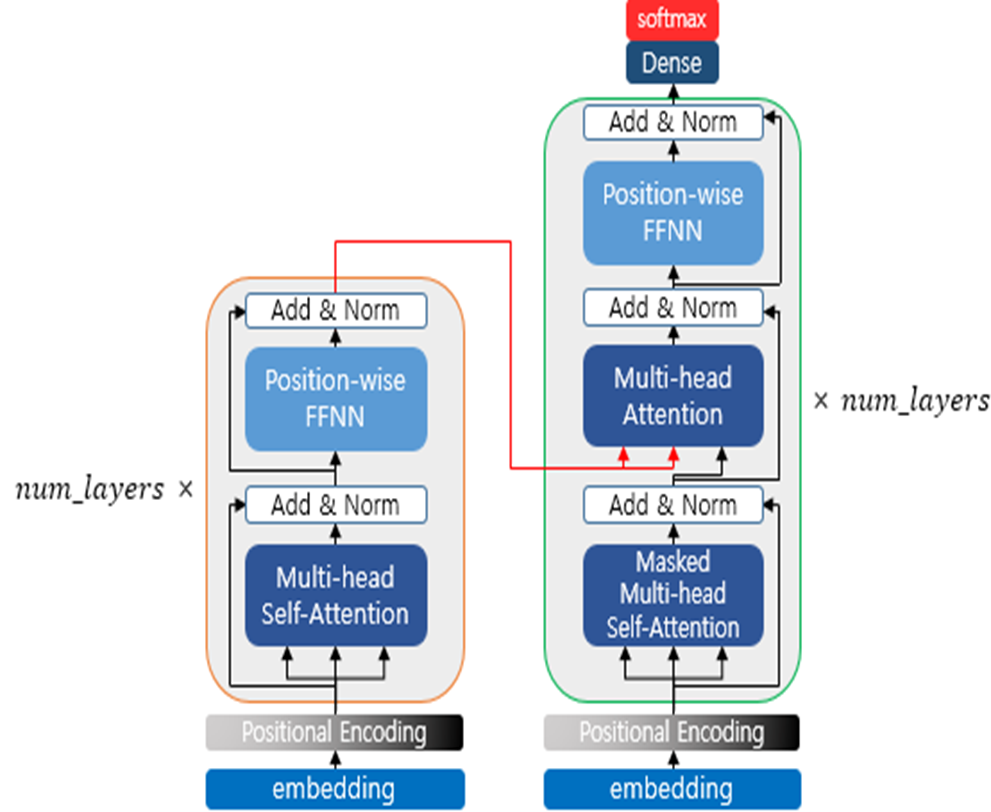
모델은 encoder와 decoder가 개씩 존재합니다. 마지막 encoder에서 첫 번째 decoder로 K, V가 전달되고, 마지막 decoder에서 softmax를 거쳐 전체 토큰의 확률분포를 구하게 됩니다.
✔️ Why Self-Attention?
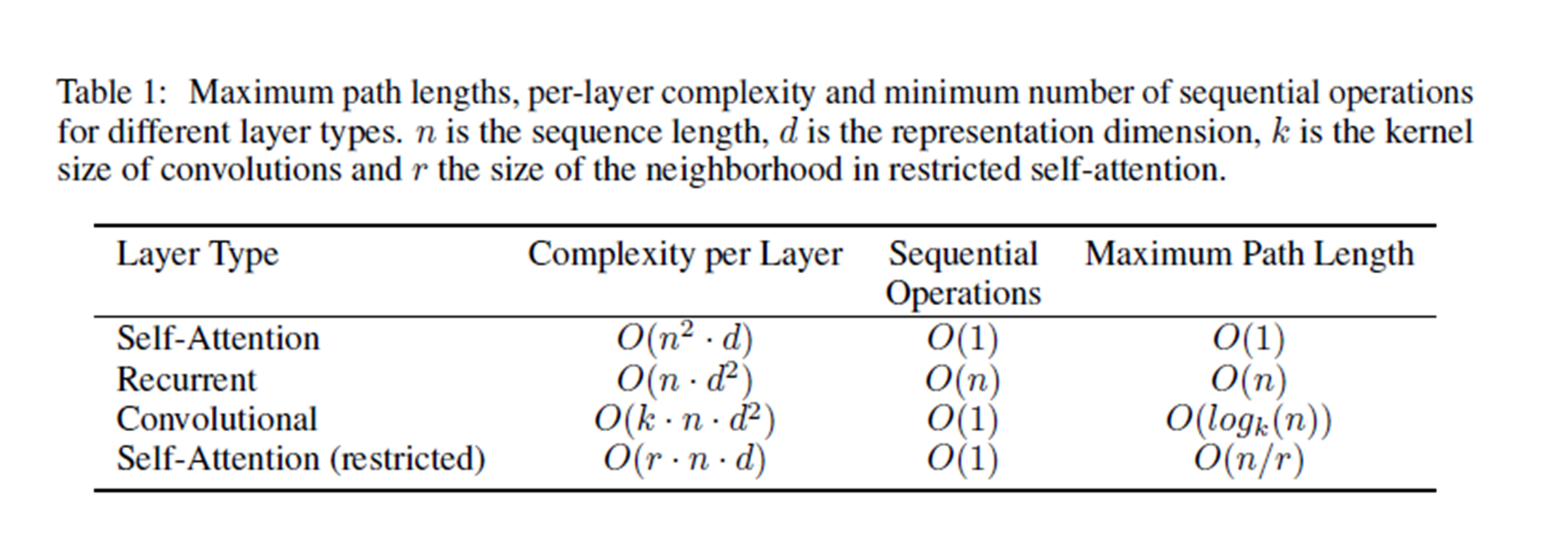
논문에서는 self-attention을 차용한 이유에 대해 세 가지 측면에서 설명합니다.
-
레이어 당 계산 복잡도가 어느 정도인가
-
병렬화될 수 있는 계산의 수(=sequential operation의 최소 수)
-
시퀀스에서 떨어진 두 토큰이 영향을 주고 받기 위해 거쳐야 하는 네트워크 내 연산 수(= 최대 경로 길이)
: 짧을 수록 gradient가 줄어들지 않으므로 학습에 유리함.
