(1) 기초 용어 정리
- 인공지능(Artificial Intelligence): 동적 컴퓨팅 환경 내에 내장된 알고리즘을 생성하고 적용하여 인간의 지능을 모방하는 기초적인 지능

-
손실함수(loss function): 모델의 예측값과 실제값 사이 차이를 수식화한 함수
-
최적화(optimization): 손실함수 값을 어떻게 감소시킬 것인지에 대한 방법론
-
일반화(Generalization): 학습 데이터와 테스트 데이터에 대한 예측 성능이 유사할수록 일반화 성능이 좋다고 표현, 즉 Overfitting이 일어날 때는 일반화 성능이 저하된 것으로 해석할 수 있음
-
과소적합(Underfitting): 모델이 너무 작거나 epoch이 너무 적어서 학습이 제대로 이루어지지 않음
-
과대적합(Overfitting): 학습 데이터에 대해 모델의 파라미터가 너무 맞춰져서 오히려 테스트 데이터에 대해서는 성능이 좋지 않음
-
교차 검증(Cross Validation): 학습 데이터를 k개의 뭉치로 분할하여, k-1 개는 학습하고 1개는 검증에 사용하는 방식을 k번 반복하여 모델의 파라미터를 최적화
-
편향(Bias): 평균적으로 값이 실제 값과 유사하면 low, 다르면 high
-
분산(Variance): 입력에 대한 출력이 얼마나 일관적인지를 보여줌. 비슷한 입력에 대해 출력의 차이가 유사하면 variance가 작으며, 차이가 크다면 variance가 크다고 볼 수 있음.
- 이때 편향과 분산은 서로 trade-off 관계로 둘 다를 동시에 줄일 수는 없음
-
Bootstrapping: 학습 데이터의 일부를 사용해 모델을 여러 개 만들고, 각각의 모델이 예측하는 값이 얼마나 일치하는가를 확인
- Bagging: 학습 데이터의 일부를 학습시킨 여러 개의 모델을 함께 사용(Parallel)
- Boosting: 작은 모델로 예측하여 예측이 틀린 데이터에 대해 예측하는 모델을 또 만들고, 이런 식으로 연쇄적으로 모델을 사용(Sequential)
(2) Neural network & MLP(Multi Layer Perceptron)
-
신경망(Neural Network)
- 신경망 = 함수, 선형 & 비선형 연산이 연속적으로 일어나는 함수
-
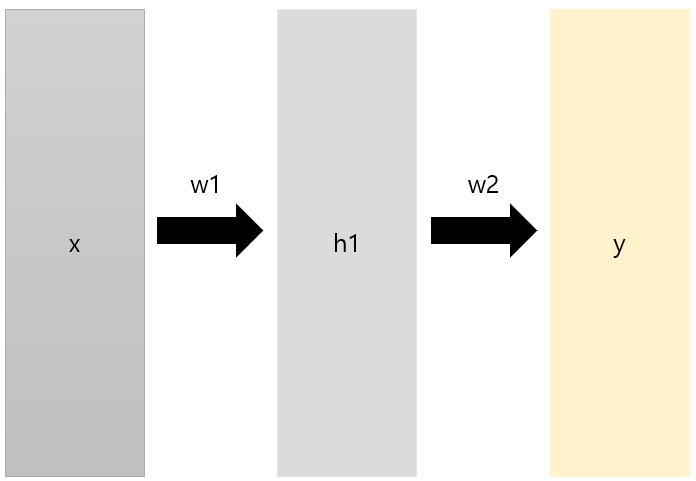
다층 퍼셉트론(Multi Layer Perceptron): 퍼셉트론 여러 층으로 구성
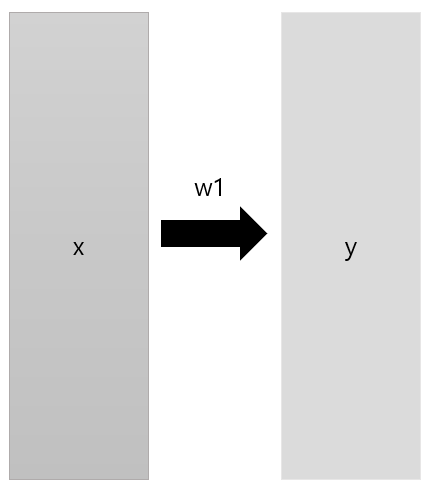
- Perceptron
-
,
-
-
-
위 Model 식까지만 전개하면 선형성만 있기 때문에 네트워크의 표현력이 제한됨. 비선형성을 추가함으로써 표현력을 극대화할 수 있기 때문에 활성화 함수를 사용함
- Multi Layer Perceptron은 위 Perceptron이 여러 층 모인 구조
(3) Loss function & Optimization
-
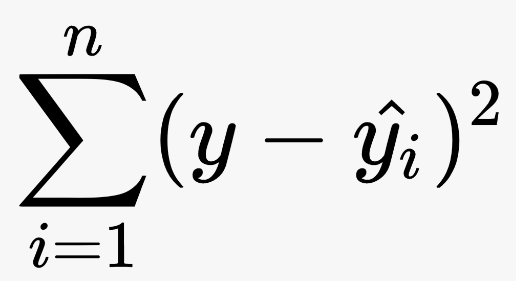
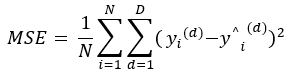
Loss function
- 회귀 문제
-
분류 문제
-
확률 문제
-
Optimization
-
Gradient Descent Algorithm
: Local Minimum을 찾는 방법론
-
Stochastic Gradient Descent
n: 학습률
-
Momentum
💫 SGD의 느린 수렴 속도 -> "이전 파라미터의 학습 방향으로 보통 향하지 않을까?"
라는 아이디어에서 출발하여 이전 파라미터 값에 β만큼 곱하여 이전 정보까지 활용해 파라미터 업데이트
-
Nesterov Accelerated Gradient
💫 Momentum의 관성 때문에 local minimum에 수렴하는 데에 오히려 좀 느림
-> "모멘텀 방향으로 이동한 곳에서의 기울기를 반영한다면?"모멘텀 방향으로 먼저 이동을 한 후에, 그 곳에서의 기울기를 구해 파라미터 업데이트
-
Adagrad
: Gradient Squares의 합
🌟 이미 많이 파라미터 업데이트가 이루어졌다면 적게 변하고, 파라미터 업데이트가 적게 이루어졌다면 크게 변화
-
Adadelta
Adagrad에서 학습이 진행됨에 따라 기울기가 소실되는 문제를 방지하려고 나왔지만,
learning rate같이 파라미터 업데이트에서 영향을 미칠 수 있는 사용자가 직접 조정할
하이퍼파리미터가 없어 잘 사용하지 않음 -
RMS Prop
Adagrad에서 step size를 추가(learning rate n)
-
Adam
어떤 optimizer를 선택해서 학습을 시키느냐에 따라 같은 모델이더라도 학습 수렴 속도에 많은 영향을 미치기 때문에 효율적인 면에서 영향이 굉장히 크다고 볼 수 있다.
보통 많이 사용하는 optimizer는 adam으로 평균적으로 괜찮은 성능을 보인다. -
-
