도입 배경
(기존 산업용 통신) UART와 같은 1:1 통신은 여러 대의 제어기 간 정보 공유와 전송 속도, 실시간성을 맞추기 어려움
(차량용 CAN 통신) 제어기 간 안정적인 정보 교환 가능
차량용 맞춤 통신으로 비용, 무게, 안정성, 통신 속도 및 거리, 실시간성이 고려되어 개발됨
개발 역사
83' BOSCH 주축 개발 시작
92' CAN 통신 적용 차량 출시
98' TT CAN(Time-Triggered) 개발 - 제어 성능 및 실시간성 향상
06' Low-speed CAN 개발 - 통신선 하나가 끊어져도 낮은 속도에서 안정적 통신 가능
16' CAN-FD 개발 - 기존 대비 통신 속도 향상
CAN 통신 개념
CAN High, Can Low를 이용해 각각의 통신선을 제어기가 공유하는 형태
-
Multi-master
네트워크로 구성된 제어기는 원하는 시점에 정보 송,수신 가능
각 제어기가 통신선을 관리하는 주인 역할을 함 -
Twisted pair(2-wire)
두 개의 통신선으로 네트워크 구성 -> 기존의 통신(이더넷 등)보다 단순한 선로 구성 가능 -
Bus Topology
제어기의 추가, 제거 용이해 설계자 입장에서 사용 용이함
다른 부품사에서 제조된 제어기들의 네트워크 구성이 CAN 통신으로 가능함
국제 표준 정의
ISO 국제표준단체에서 ISO 11898 의 spec으로 CAN 정의
- Physical Layer : 통신 신호를 어떻게 만들 것인가?
- Data link Layer : 통신과 메시지의 모양을 어떻게 구성할 것인가?
CAN 통신 물리 계층
통신이 어떤 신호를 통해 전달되는지에 관한 물리 계층의 spec
- 네트워크의 구성
- 통신선의 길이
- 메인 선에서 제어기까지의 거리
두 가닥의 통신선 이용
최대 1Mbit/s 최저 10kbit/s 통신 속도 조절 가능
1000kbit/s 의 경우 최대 40m까지 통신선 길이 제한됨
-> 일반적인 차량 내 30~40m 통신선 필요
-> 130m까지 구성 가능한 500kbps 속도로 보통 구성
통신선로 양 끝단에 종단 저항 -> 반사파 현상 제거를 위함
CAN 통신 Topology
Star, Ring, Bus Topology 모두 사용가능함
차량 내에서는 Bus Topology 사용해 여러 개의 네트워크 구성
- Powertrain
- Chassis
- Body
- Information
- 중간에 Gateway가 각 네트워크 공유
CAN 통신 물리 계층 동작 원리
Differential signal
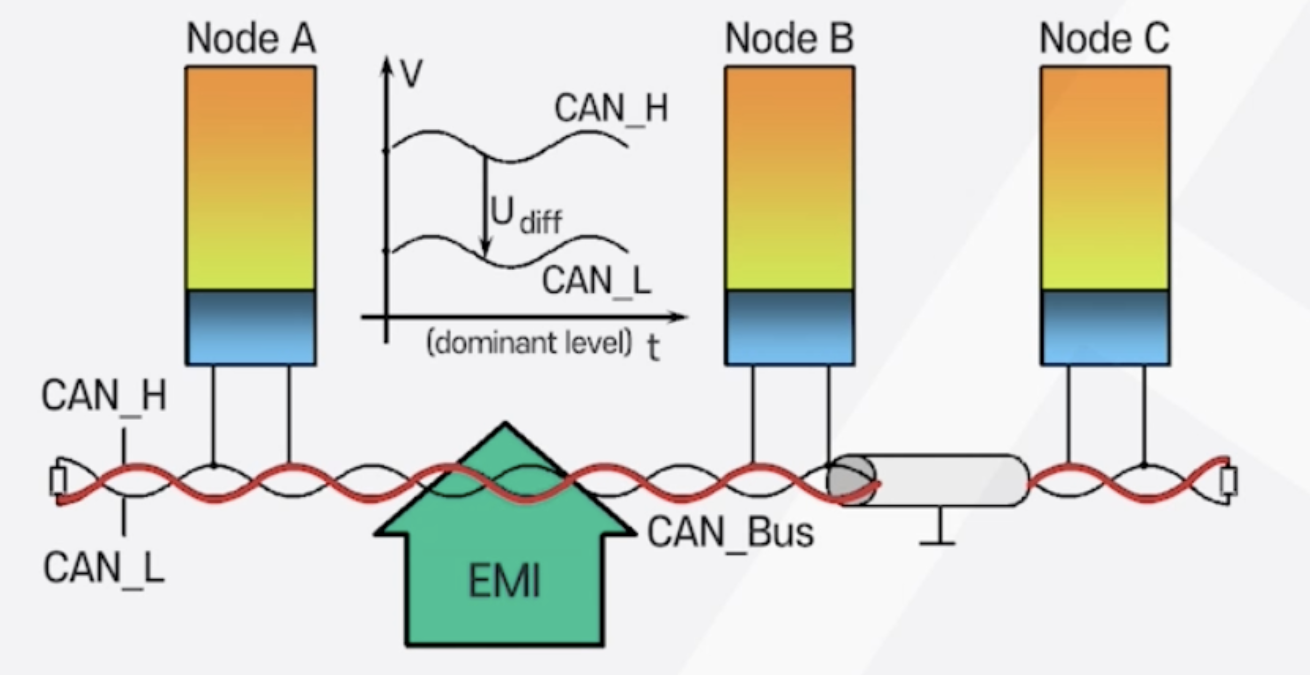
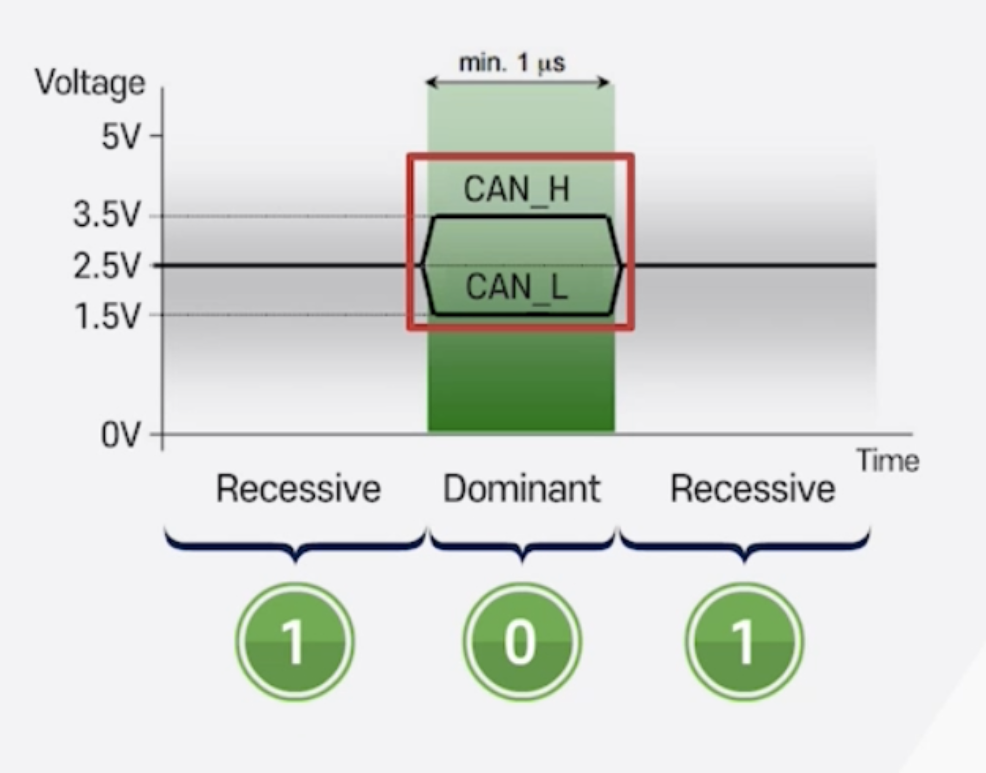
두 통신선의 전압 차이로 0 또는 1 판별
- 0 의 신호 : Dominant
- 1 의 신호 : Recessive
두 신호가 충돌 시 0의 신호가 이김
외부의 진동, 전자기파에 의한 신호의 왜곡 발생 가능
-> 신호의 왜곡은 두 통신선에 모두 작용하기 때문에 전압 차이는 유지됨
-> 1 또는 0 판별에 문제 없음
= 매우 안전한 통신 방식
transceiver
각 High/Low 신호는 Transceiver를 통해 구현됨
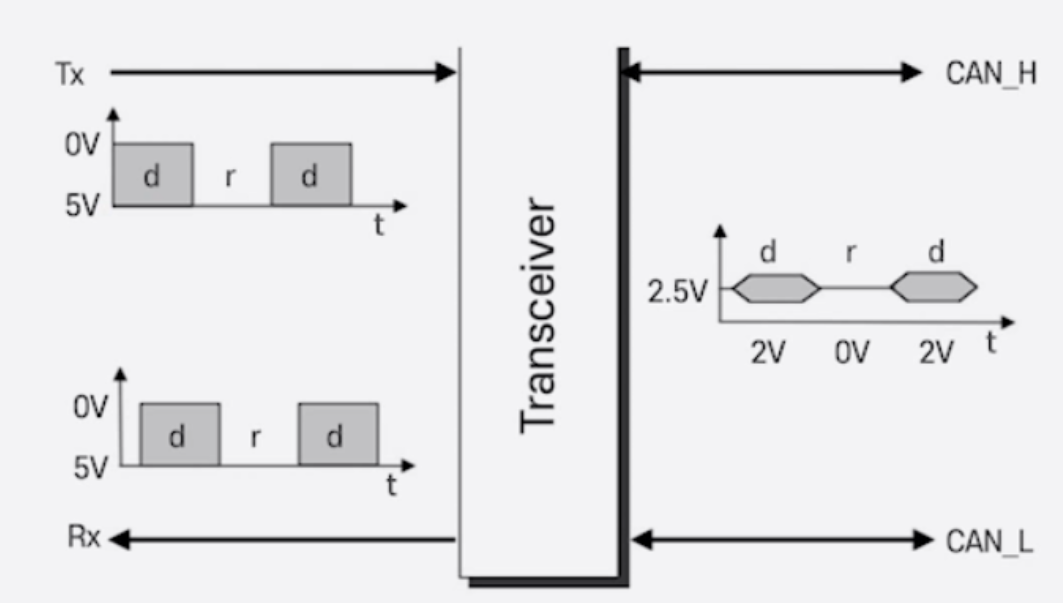
TTL 레벨 신호 -> CAN Differential 신호 생성
Transmitter(발신기) -- Message(정보) --> Receiver(수신기)
데이터링크 구조
Data Frame : 정보를 담고 있는 그릇

-
SOF (Start of Frame): single dominant bit
프레임 포맷 정의 -
Arbitration Field :
11 bit identifier
1 bit RTR(Remote Transmission Request) Dominat for data frames, recessive for remote frames
메시지의 인덱스 넘버 지정
ex) ID0 엔진, ID1 브레이크, IC2 내비게이션 -
CRC (Cyclic Redundancy Check) :
15 bit CRC with generator polynomial X^15+X^14+X^10+X^8+X^7+X^4+X^3+1
1 bit CRC delimiter : single (always) recessive bit
수신 확인으로 데이터 안정성 보장 -
ACK (Acknowledgement)
1 bit ACK slot : dominant overwriting
1 bit ACK delimiter : single (always) recessive bit
정확한 데이터 수신 시 발신자에게 전달
부가 정보 이용 -> 안정적인 데이터 전달 -
End of Frame : 7 recessive bits
Arbitration(중재) Field
버스에 연결된 여러 개의 제어기가 동시에 메세지를 보내려고 할 때 Message ID 정보로 메세지 전송 순서를 정함
Message ID 정보
숫자로 표현될 수 있는 정보
순차적인 메세지 전소잉 필요함 -> 메세지 간 우선 순위 경쟁에 활용
번호가 낮을수록 우선 순위가 높음
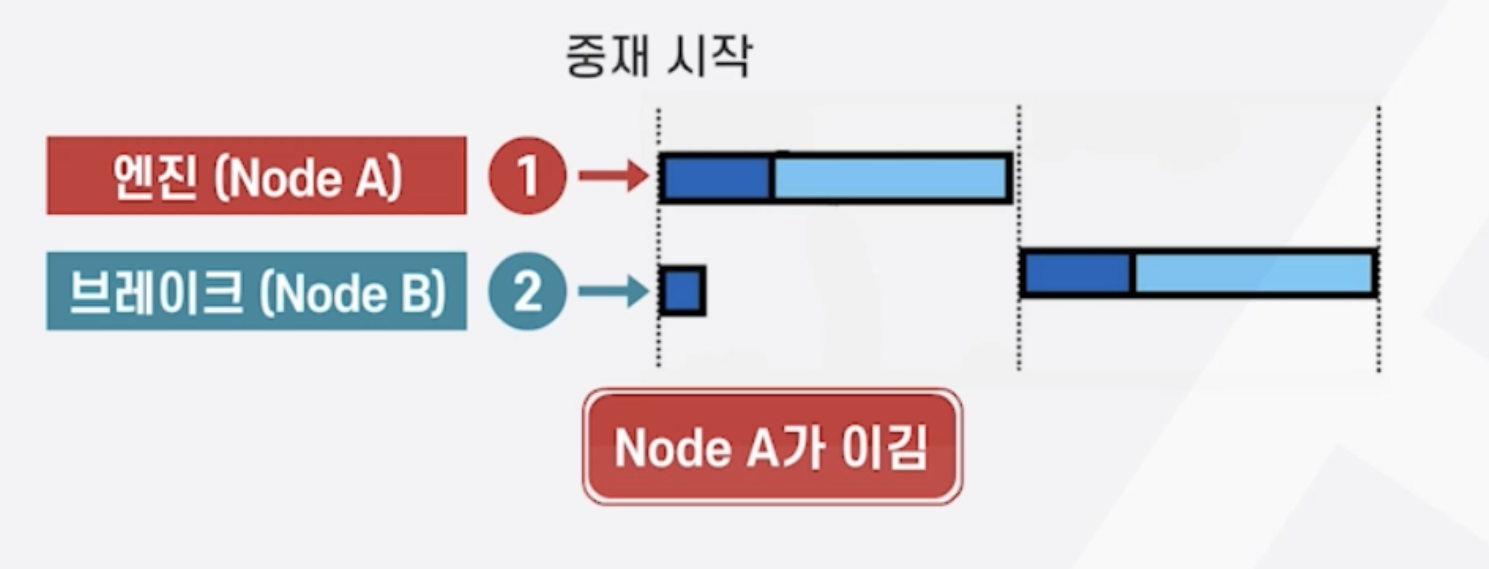
메세지 1번이 전송이 완료된 후 메세지 2번을 전송할 수 있음
Sampling Point
-
Bit rate (통신 속도)
차량 내 500Kbps 속도 이용 -
Bit Time
1 bit의 시간 길이
500Kbps의 경우 1 bit time = 1/500,000s = 2us -
Sample Point
1 bit의 Bit time 중 0/1을 판단할 수 있는 지점
1 bit time = 2us 인 경우, 2us 동안 0/1을 확인할 지점을 지정 -
Time Quanta
1 bit를 나누는 최소 단위
1 time quanta = 100ns의 경우, 2us = 20개의 time quanta로 구성
sampling 지점에 따라 다른 값 측정
CAN에서 Sample Point
1 bit의 길이는 통신 속도에 의해 결정
500Kbps 설정 -> 1 bit time = 2us = 20개의 time quanta 중 smaple point 지정 위치에 따라 다른 값 측정 가능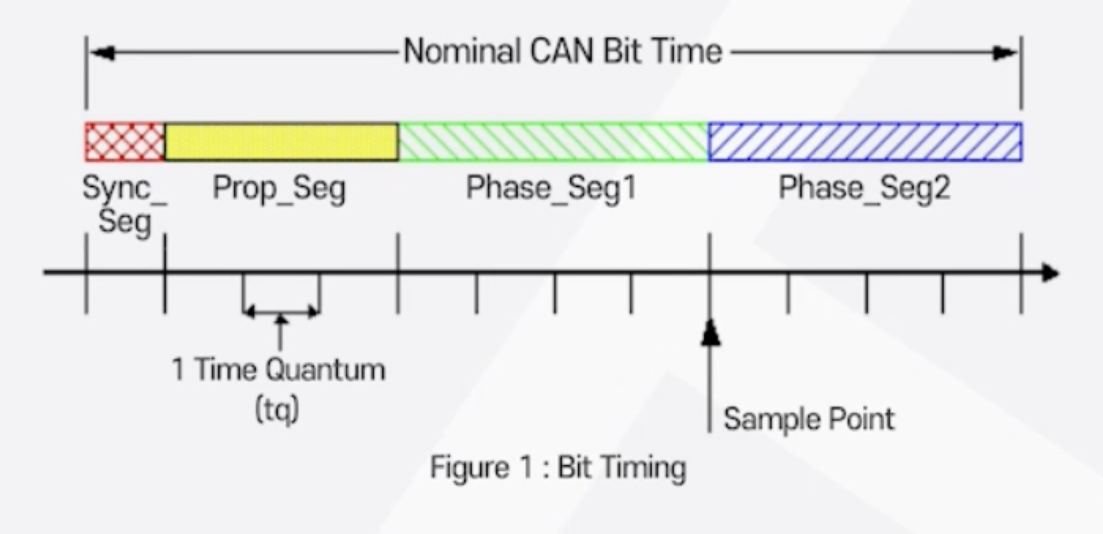
Phase seg 1과 Phase seg 2 사이의 지점을 sample point로 지정하여 퍼센트(%)로 표현함
1 bit 전체 중 sampling 지점에 대한 기준점 제시
보통 보다 안정적인 신호를 가지는 70%이상의 지점으로 정함
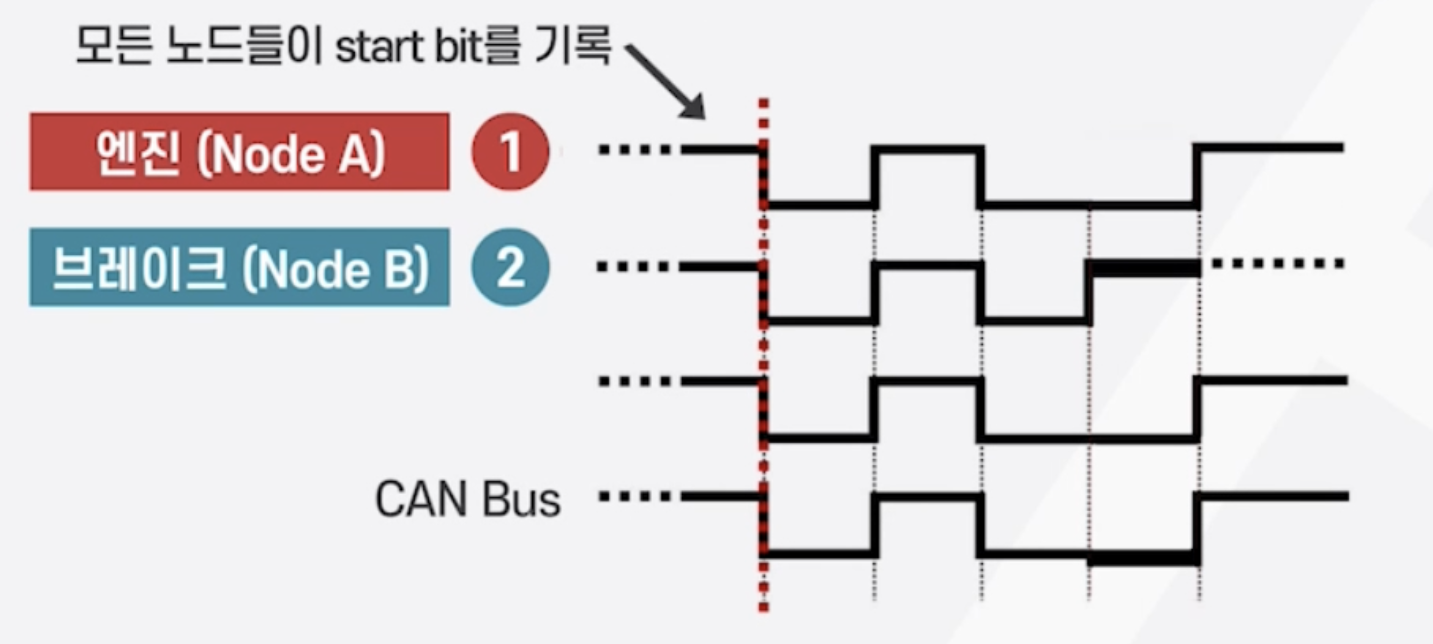
Arbitration 원리
CAN 통신 신호 = 우성 비트(Dominant bit), 열성 비트(Recessive bit)
두 신호가 충돌 시 우성 비트가 bus 신호 점유
Arbitration : 여러 제어기가 동시에 메시지를 전송하려 할 때 발생하는 현상
CAN ID의 설정에 따라 신호를 전달하는 제어기 설정
동작과정 ex)
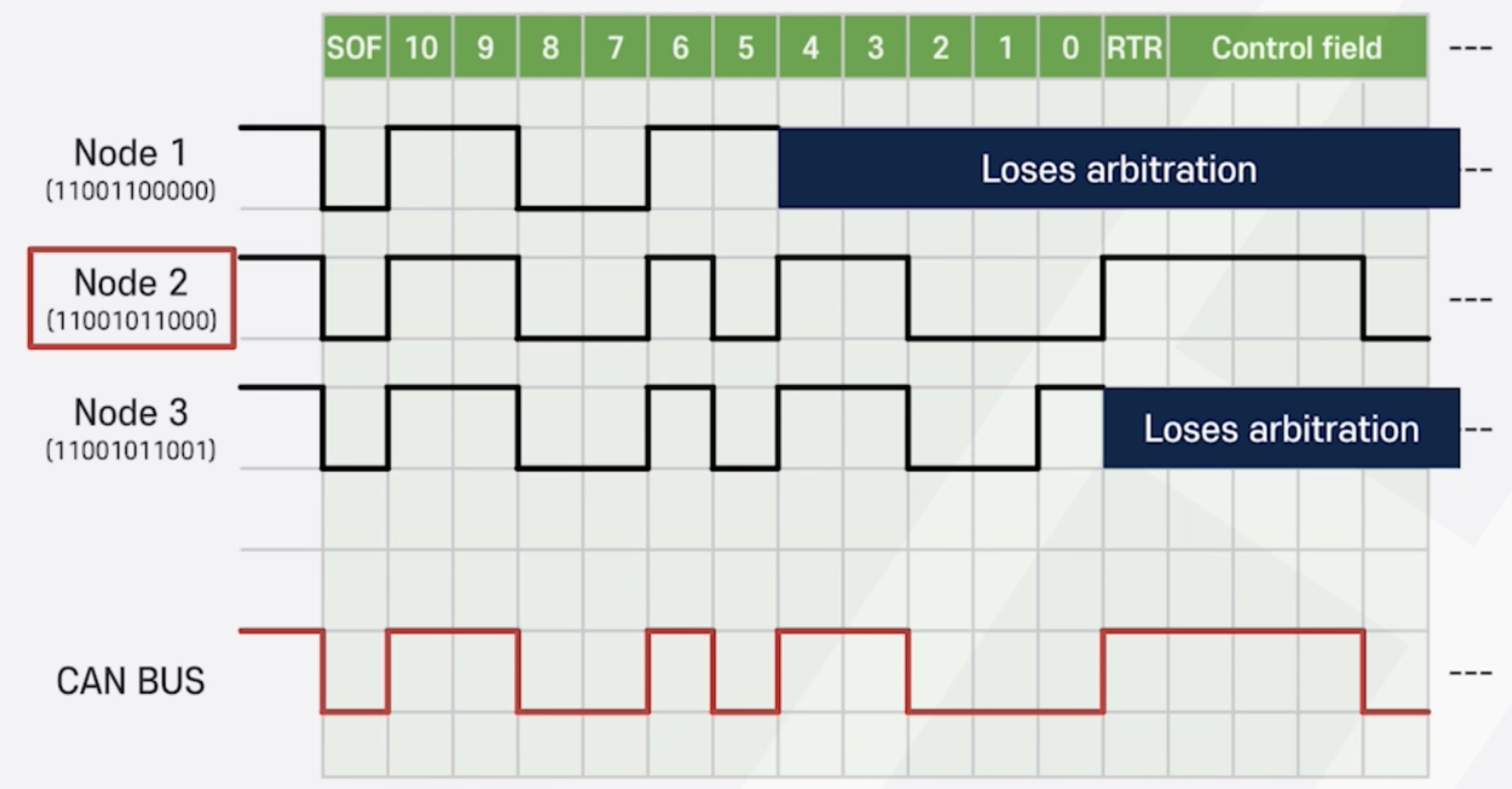
각 Message ID는 서로 다른 값을 가짐
동일한 비트를 전송할 때는 동작하지 않음
서로 다른 비트를 전송할 때 Arbitration 동작
-> 열성비트는 우성비트에 의해 무시됨
-> 무시된 비트를 가진 제어기는 이후의 메시지 신호 전달을 중지함(Loses Aritration)
-> 제어기 2의 데이터 전송 완료. 다시 메시지 전달하지 않음
CAN-FD
CAN-Flexible Datarate
CAN 통신에서 파생된 새로운 개념
제어기 수와 데이터량 증가로 기존의 방식에 한계
기존 CAN 통신의 네트워크 체계 유지, 성능 개선 방안 모색
성능 개선 방안 모색
- 기존의 네트워크 체계 유지
실시간성, Wire 체계 - 배선길이, 제어기까지의 거리 - 전송 가능 데이터 크기의 증가
기존 8byte로 고정
암호화 형태의 데이터 필요 -> 더 많은 데이터를 한 번에 전송해야 함
긴 데이터의 순차 전송에 따른 지연 시간 차이 문제 해결 필요
단일 신호 데이터 일괄 전송 가능
전송 가능 데이터 크기의 증가로 메시지 개수 감소
성능 개선 내역
- 메시지 프레임 당 전송 데이터 수
8byte -> 64byte
최대 8배 - 통신 속도
1Mbps(500kbit/sec) -> 2Mbit/sec
약 4배 - 네트워크 구조 및 와이어링 하니스를 그대로 활용하면서 성능 향상
- 통신속도가 증가함과 동시네 2개의 통신 속도를 가지게 됨에 따라TDC(Transmission Delay Compensation), SS_(Secondary Sampling Point)와 같은 기능이 부가적으로 필요함
CAN-XL
Ethernet과 Classic CAN, CAN-FD 사이의 중간 단계 제어기들의 정보 처리
Tunneling(터널링) 하나의 프로토콜이 다른 프로토콜을 감싸는 캡슐화 기능을 통해 TCP/IP 형태의 데이터를 변환없이 그대로 CAN-XL 통신으로 전달할 수 있는 기능 제공
목표 성능
- 하위 호환성 지원
기존의 CAN-FD 통신 지원 - 최대 전송 데이터 길이 증가
CAN-FD 64byte -> CAN-XL 2048 byte - 최대 전송 속도 증가
CAN-FD 2Mbps -> CAN-XL 10Mbps
추가된 기능
- XL : Frame Format Switch
CAN-XL/CAN-FD 통신용 메시지 구분 - ADS : Arbitration Data Switch
Arbitration 영역/데이터 전송 영역의 통신 속도 구분 - DLC : Data Length Code
최대 전송 데이터 길이 증가 - VCAN ID : 8bit Virtual CAN Identifier
로직적으로 별도의 네트워크 구성 - PT : Payload Type
데이터의 형태 구분(Ethernet, TCP/IP, CAN ..0
