차량에 자율주행을 적용할 때 다양한 제약 조건이 존재
- 조향각의 속도가 너무 빠르면 안됨
- 횡방향 가속도가 너무 크면 안됨
- 자동차 엔진의 RPM이 너무 높아도 안됨
- 브레이크가 낼 수 있는 최대 감속도의 양이 정해짐
여러 제약 조건을 고려하면서 원하는 목표 경로를 잘 따라가는 것이 중요함
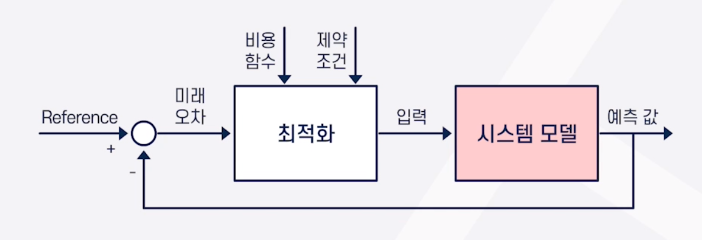
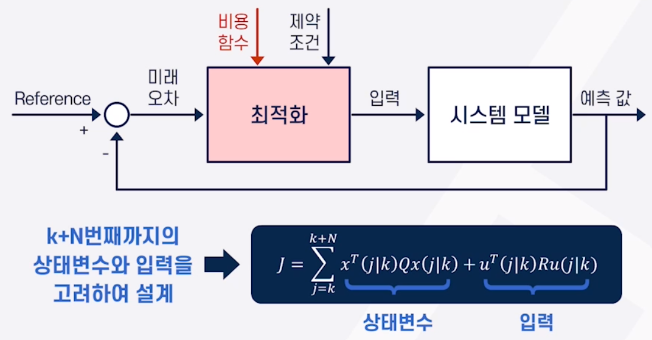
모델 예측 제어 Model Predictive Control
- 상태변수나 출력 예측
- 적절한 비용함수와 제약조건 설정
- 최적화 실행
- 제어입력 계산

시스템 모델이 복잡하거나 예측해야 할 시간이 길어지면 계산량이 많아짐
Quadratic Programming Solver
최적화 방법 중 가장 일반적으로 사용
지능제어
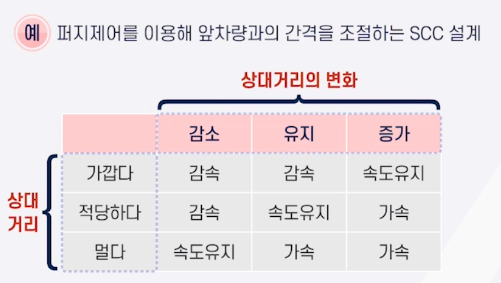
퍼지(Fuzzy) 제어
Fuzzy : 사고나 판단의 애매함
애매한 것을 숫자로 나타내주고 이러한 것을 기반으로 어떤 제어를 할 지 나타내 주는 방식
0과 1 사이에 임이의 실수 값을 반환 -> 제어
신경망 제어
뉴런의 수학적 모델링을 기반으로 구현된 신경망을 통해서 제어하는 방식
End-to-End 자율주행 방식
입력으로부터 출력까지의 모든 게 오로지 신경망에 의해서만 연결된 방식
학습 모델이 왜 잘 되는지 안되는지 알 수 없음
강화학습
여러 번의 시행착오를 거쳐 여러 개의 행동 중 보상을 최대화 하는 행동을 선택하는 방식
컴퓨터 시뮬레이션이 실제 환경하고 다르게 되면 action을 결정하는데 어려움
Reward를 어떻게 설정하느냐의 문제
