상태관측기 State Observer = 상태 추정기 State Estimator
센서로 얻을 수 없거나 측정 불가능한 값을 수식으로 관측 또는 추정하는 것
Full State Feedback 방식 제어기 설계 시 필요 ( 일부 상태변수를 모를 때 설계)
현실에서 알 수 없었던 x의 값을 x^으로 알 수 있게 됨
상태공간모델 필요
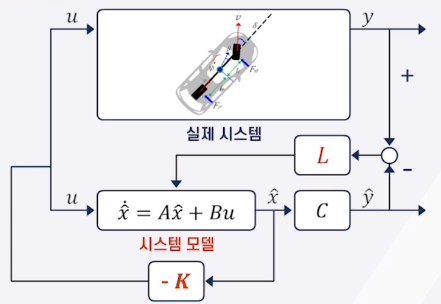
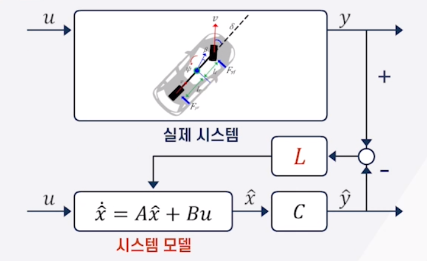
실제 시스템 - 시스템 모델
목표 : X^' = x'
정확한 시스템 모델 구현 수식으로 계산 가능
Luenberger Observer 방식
실제 시스템과 수학적 모델의 출력 차이를 이용해 추정값을 보정해주는 방식
출력 차이 -> L만큼 이득 -> x 계속 보정
상태 관측기 이득 L
e' = (A - LC)e
L -> X^-X = 0 수렴 -> Pole Placement 방식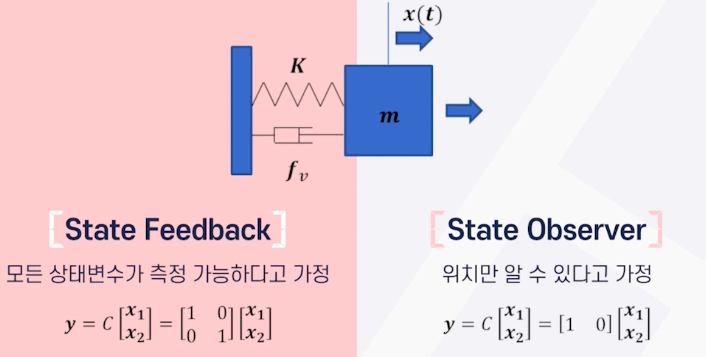
L 값을 선정할 때 오차 수렴 속도를 고려해야 함
상태변수 추정치가 시스템 동역학보다 빨리 수렴해야 함
-
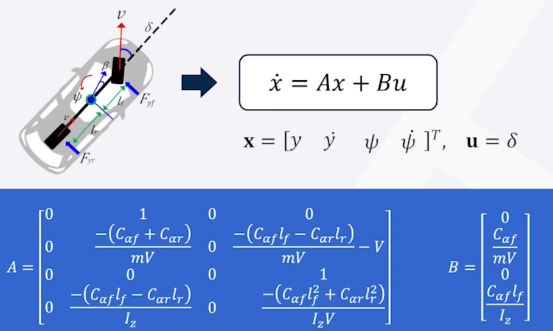
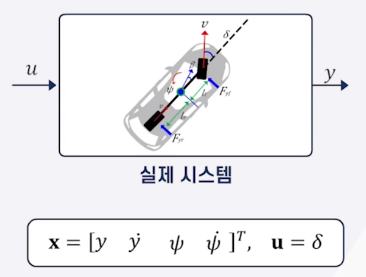
자율주행차의 횡방향 움직임을 상태공간모델로 나타냄
-
Full State Feedback 제어기를 설계
-
상태관측기 설계
-> 상태공간모델의 모든 상태변수를 알지 못하기 때문 -
출력 값 비교
-
x^을 기준으로 Full State Feedback 설계