월드 좌표계의 3차원 점 > 변환 > 2차원 영상의 픽셀의 좌표
-
핀홀 카메라 행렬 모델
내부 파라미터와 외부 파라미터의 행렬
실제 카메라의 캘리브레이션에서는 렌즈의 왜곡까지 고려 -
카메라 캘리브레이션
월드 좌표계와 3차원 점과 대응하는 영상의 2차원 픽셀로의 변환 행렬 모델을 찾는 과정 -
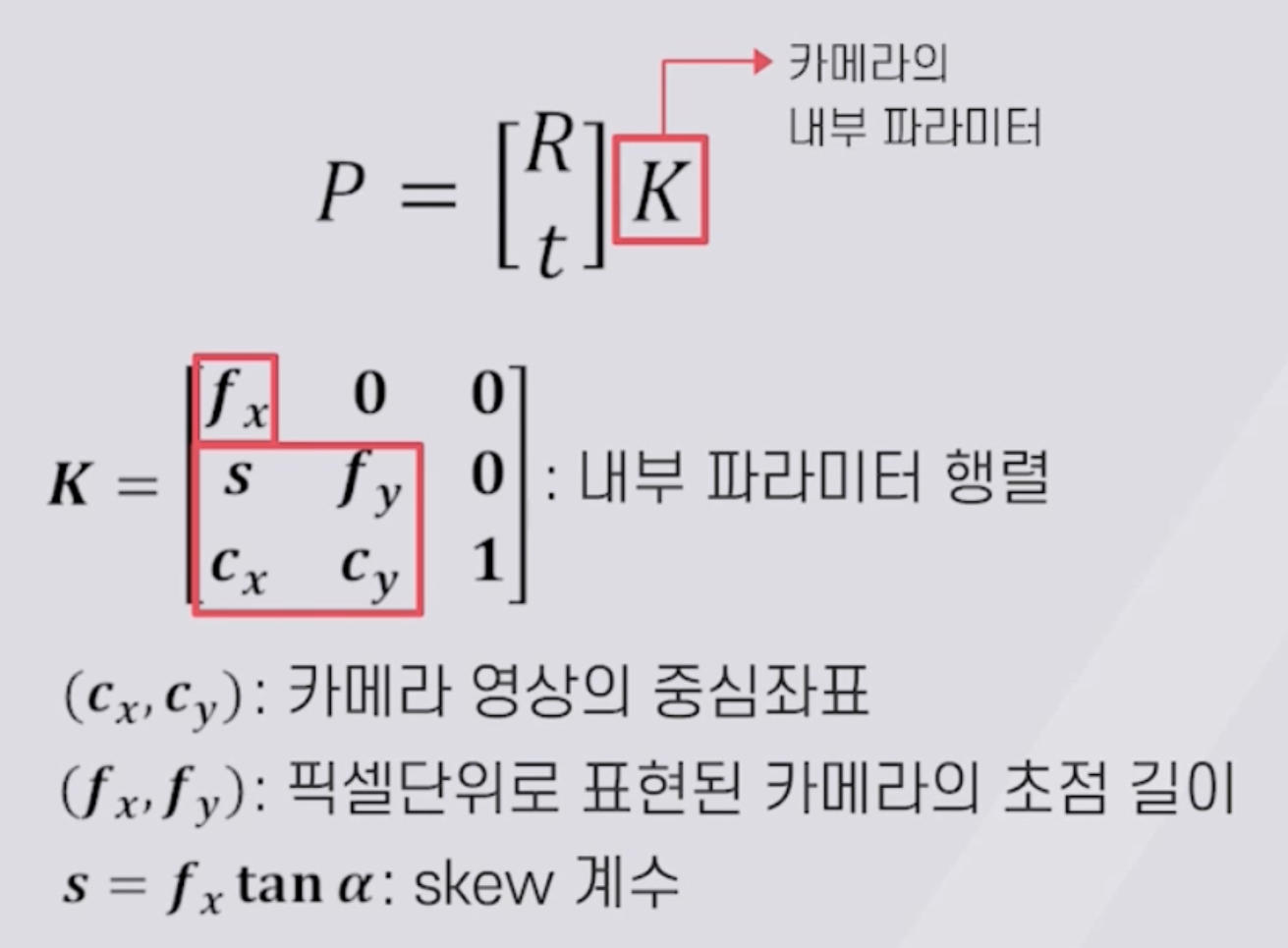
내부 파라미터
카메라 자체의 셋업에 관련된 파라미터
3차원 카메라 좌표계에서 2차원 픽셀 좌표로 변환하는 과정 표현, 좌표계와 픽셀값과의 대응 설명 -
외부 파라미터
3차원 월드 좌표계에서 3차원 카메라 좌표계로 변환하는 과정 표현 -
카메라 캘리브레이션 과정
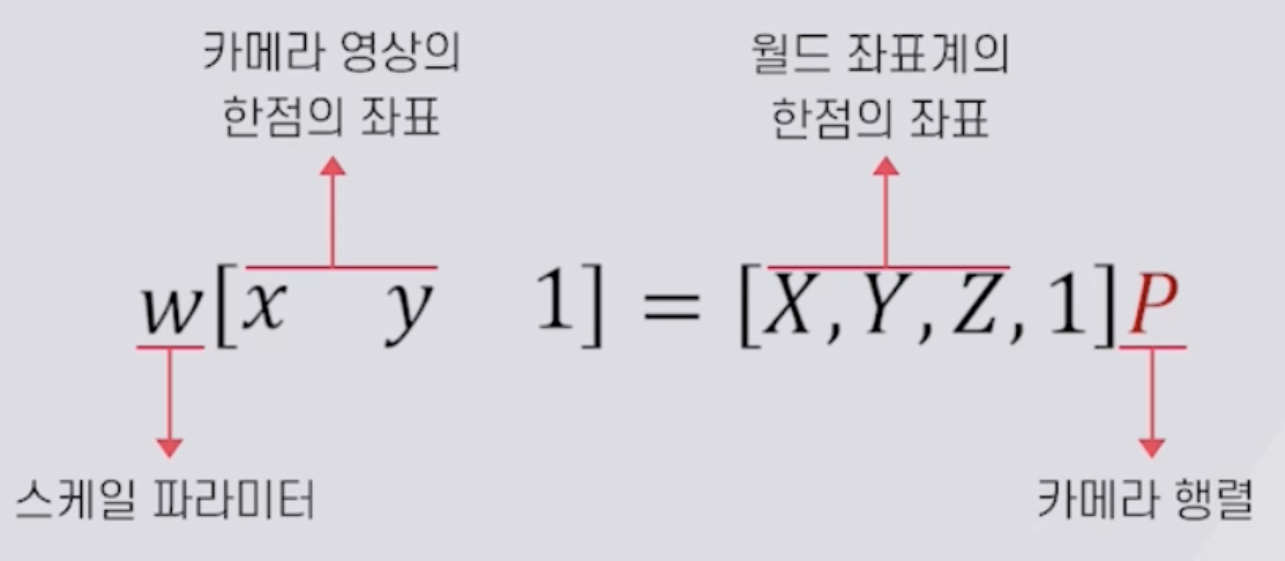
3차원 월드 좌표계의 한 점을 카메라 영상의 픽셀로 변환하는 카메라 행렬을 얻는 것
찾아야 하는 카메라 행렬 P
이상적인 핀홀 카메라 모델 기반
3차원 월드 좌표계
| 카메라 외부 파라미터 사용
3차원 카메라 좌표계
|카메라 내부 파라미터 사용
영상의 2차원 픽셀 좌표계
렌즈 카메라의 렌즈 왜곡 보정 모델 기반
방사형(Radial)모델, 접선형(Tangential)모델 보정이 필요함
체커보드와 같은 반복적인 패턴을 카메라로 여러 장의 영상을 찍어 3D 월드 좌표계와 2D 이미지 픽셀의 대응점들을 찾아 수행
카메라 캘리브레이션 툴 사용
|
영상에서 체커보드의 코너점 파악
|
외부 파라미터와 내부 파라미터 계산
