차량의 조향시스템과의 밀접한 관계를 가짐
- 도로의 차로 인식 및 차로 유지
- 장애물 인식 및 회피
- 주행상황 판단 및 차로 변경
ex) 차로유지시스템, 차로변경시스템
목표 경로 -> 상위제어기 -> 목표 조향각 -> 하위제어기 -> 모터입력
횡방향 ADAS 종류
- Lane Following Assist LKAS
차로의 중앙을 유지하도록 하는 차로 유지 시스템
2.Lane Change System
주변상황, 충돌위험도를 고려해 차로를 자동으로 변경해주는 자동차로 변경 시스템
-
Forward Collision Avoidance
보행자, 자동차 등 장애물로 긴급상황 발생 시 제동과 함께 자동으로 회피하는 시스템 -
Blind Spot Detection
차로 변경 시 측후방 쪽 감지를 보조 -
Lane Departure Warning
차로 이탈 경고 시스템
LKAS 차선이탈방지 보조시스템
운전가가 의도하지 않은 자동차의 차로이탈을 방지하는 시스템
차로인식 -> 핸들 제어
자동차 프레임이 차로를 넘어가는 정도에 제어
목표 경로 : 차로의 중앙
LKS 차로유지시스템
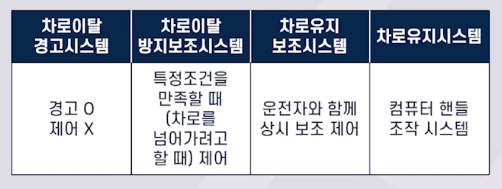
차로유지보조시스템 : 운전자 핸들 조작 -> 일정기간 운전자가 핸들 잡지 않을 시 기능 해제
차로유지시스템 : 컴퓨터 핸들 조작
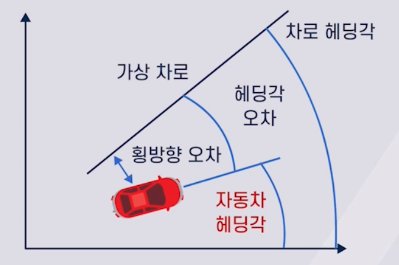
차로의 중심 -> 가상차로
- 횡방향 오차
- 헤딩각
차로변경시스템
운전자가 방향지시등을 동작시키면 스스로 차로를 변경하는 시스템
1. 카메라를 통한 차로인식
2. 차로변경 결정 및 위험분석
3. 차로정보를 통해 목표경로 설정
4. 차로유지시스템 적용
- 차로가 부정확할 때
- 차로가 정확하지만 차로가 나눠지거나 합쳐질 때
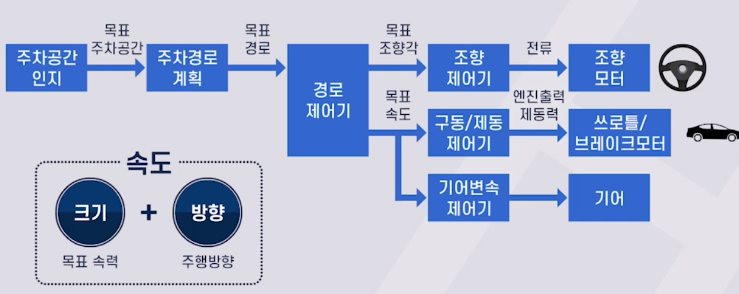
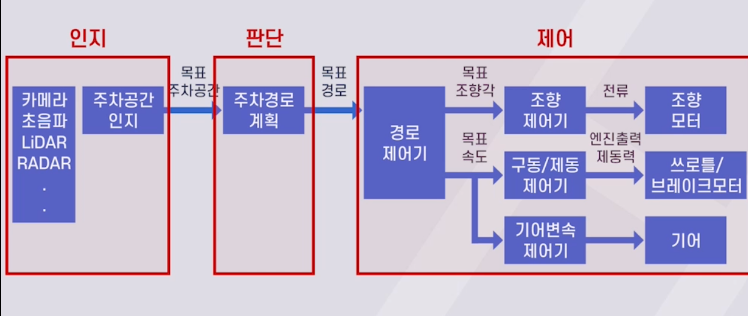
자동주차시스템
주차 핸들(회전각), 액셀/브레이크(바퀴의 움직임), 기어(전진/후진)이 관여
R-AEB (Rear-Autonomous Emergency Brake)
주차장에서 발생 가능한 다양한 주행 환경에 대해서 연구
AEB와 달리 후방 장애물에 대한 긴급제동
