ORB는 FAST의 특징점 추출 방법과 BRIEF descriptor의 fusion.
SIFT와 SURF보다 빠르며 SIFT와 맞먹는 성능을 보임.
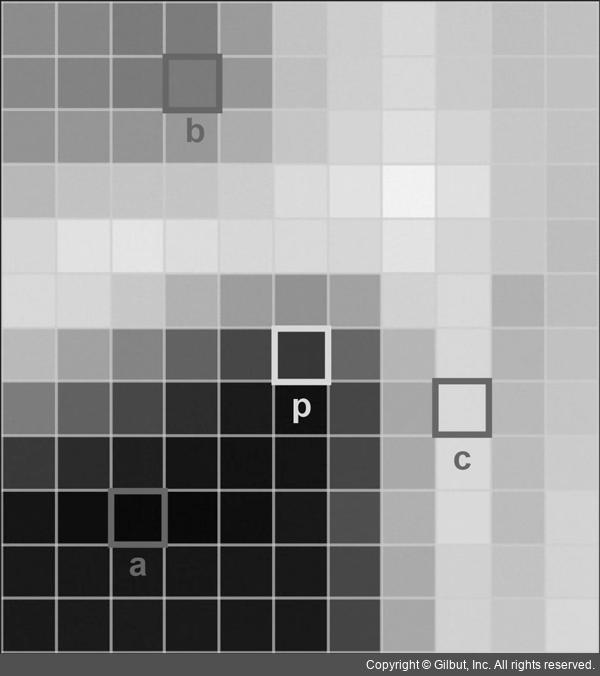
FAST (Features from Accelerated Segment Test)
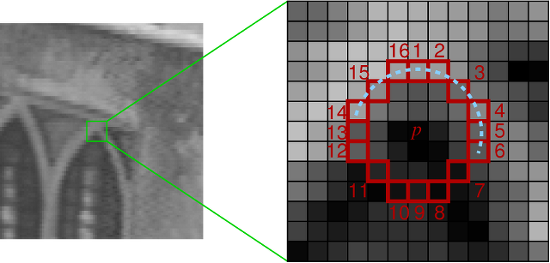
픽셀 를 중심으로 상하좌우, 대각선 방향의 총 16개의 픽셀들과 값을 비교하여, 차이가 9개 이상 연속으로 존재하면 특징점으로 판단.
: 픽셀 에서의 밝기값, : 밝기 차이에 대한 임계값이라 하면
: 연속으로 개 이상 존재하면 어두운 특징점
: 연속으로 개 이상 존재하면 밝은 특징점
의 값에 따라 FAST-n이라 명칭.
논문에 의하면 의 경우 성능이 가장 우수.
개의 연속되는 픽셀을 판단할 경우, decision tree 학습 방법 사용.
픽셀의 밝기를 보다 훨씬 밝은 경우, 훨씬 어두운 경우, 유사한 경우로 분류하여 밝기 분포를 16차원의 벡터로 표현.
이를 decision tree에 입력하여 특징점 판단.
NMS를 통해 특징성이 극대인 점만을 특징점으로 판단.
를 통해
인접한 특징점 중에 가장 높은 값을 갖는 점을 특징점으로 판단.
Harris Corner보다 빠르고 정확.
BRIEF (Binary Robust Independent Elementary Features)
특징점 descriptor를 생성하는 알고리즘.
binary descriptor를 이용하여 descriptor를 생성.
Binary Descriptor
에 대하여 가 보다 더 밝은 경우 이라 하면,
, , 는 이진수 로 표현 가능.
ORB (Oriented Fast and Rotated BRIEF)
Fast를 통해 keypoint 판단
→ Harris Corner Detection을 통해 상위 개의 특징점 판단.
→ scale invariant를 위해 피라미드 사용.
→ BRIEF를 통해 descriptor 생성.
Reference
영상 특징점(keypoint) 추출방법
OpenCV 4로 배우는 컴퓨터 비전과 머신 러닝
ORB (Oriented Fast and Rotated BRIEF)
