#### 1. Monte Carlo Control Policy ####
#==============================================================================
import numpy as np
num_states = 5
num_actions = 2
num_episodes = 5000
theta = np.random.randn(num_states, num_actions) # 각 상태에서 행동별 가중치
#원래 사실 theta를 어떻게 initialize 해야하는지 감이 안잡혔었음.
# Softmax 정책 함수
def softmax_policy(state, theta):
preferences = theta[state] # 해당 상태의 행동별 가중치 가져오기
exp_values = np.exp(preferences - np.max(preferences)) # 안정적인 softmax
return exp_values / np.sum(exp_values)
# 확률에 따라 행동 선택
def choose_action(state, theta):
probs = softmax_policy(state, theta)
return np.random.choice(num_actions, p=probs)
# 한 번의 에피소드를 실행하면서 데이터를 모으는 코드 (Monte Carlo)
def run_episode(theta, max_steps=10):
episode = []
state = np.random.randint(0, num_states) # 랜덤한 초기 상태
for _ in range(max_steps): # max_steps 이후 종료
action = choose_action(state, theta)
next_state = np.random.randint(0, num_states)
reward = np.random.randn()
episode.append((state, action, reward))
state = next_state
return episode
alpha = 0.01 # 학습률
gamma = 0.9 # 감가율 (할인율)
# GLIE Monte Carlo Control 학습
for episode_num in range(1, num_episodes + 1):
episode = run_episode(theta)
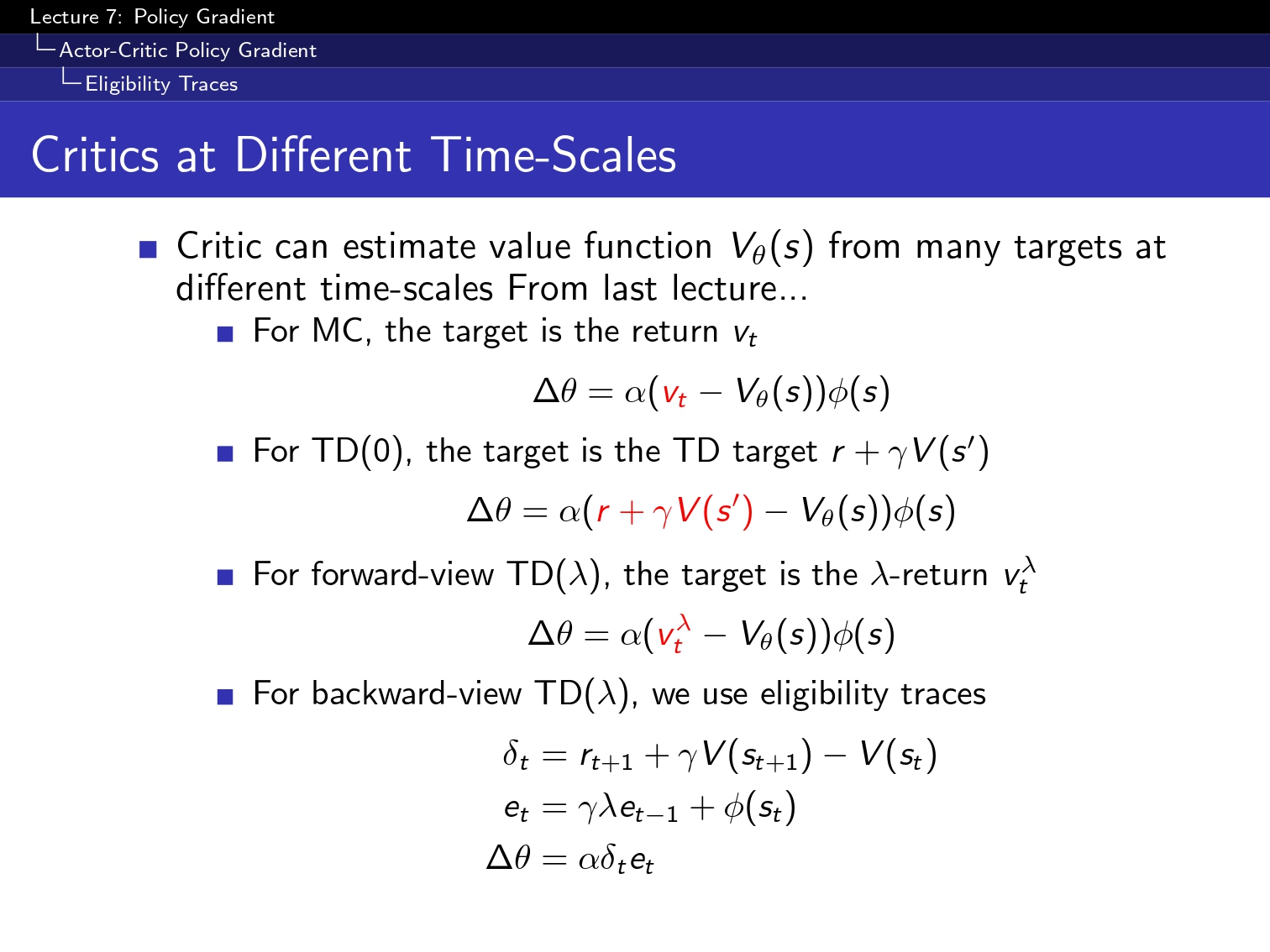
G = 0 # 리턴값 초기화
for state, action, reward in reversed(episode):
G = reward + gamma * G # 할인된 보상 계산
probs = softmax_policy(state, theta)
grad = np.zeros_like(theta[state])
#gradient를 저장하는 저장소!
grad[action] = 1 - probs[action] # log 확률의 gradient가 이렇게 계산이 되고
#여기서 헷갈렸던 건, 선택한 행동 선택한 행동 a에 대해서만 기울기를 계산
theta[state] += alpha * grad * G # 정책 파라미터 업데이트
#alpha * log gradient * G 이렇게 되는 것임.
# 학습된 파라미터 출력
print("Theta:")
print(theta)
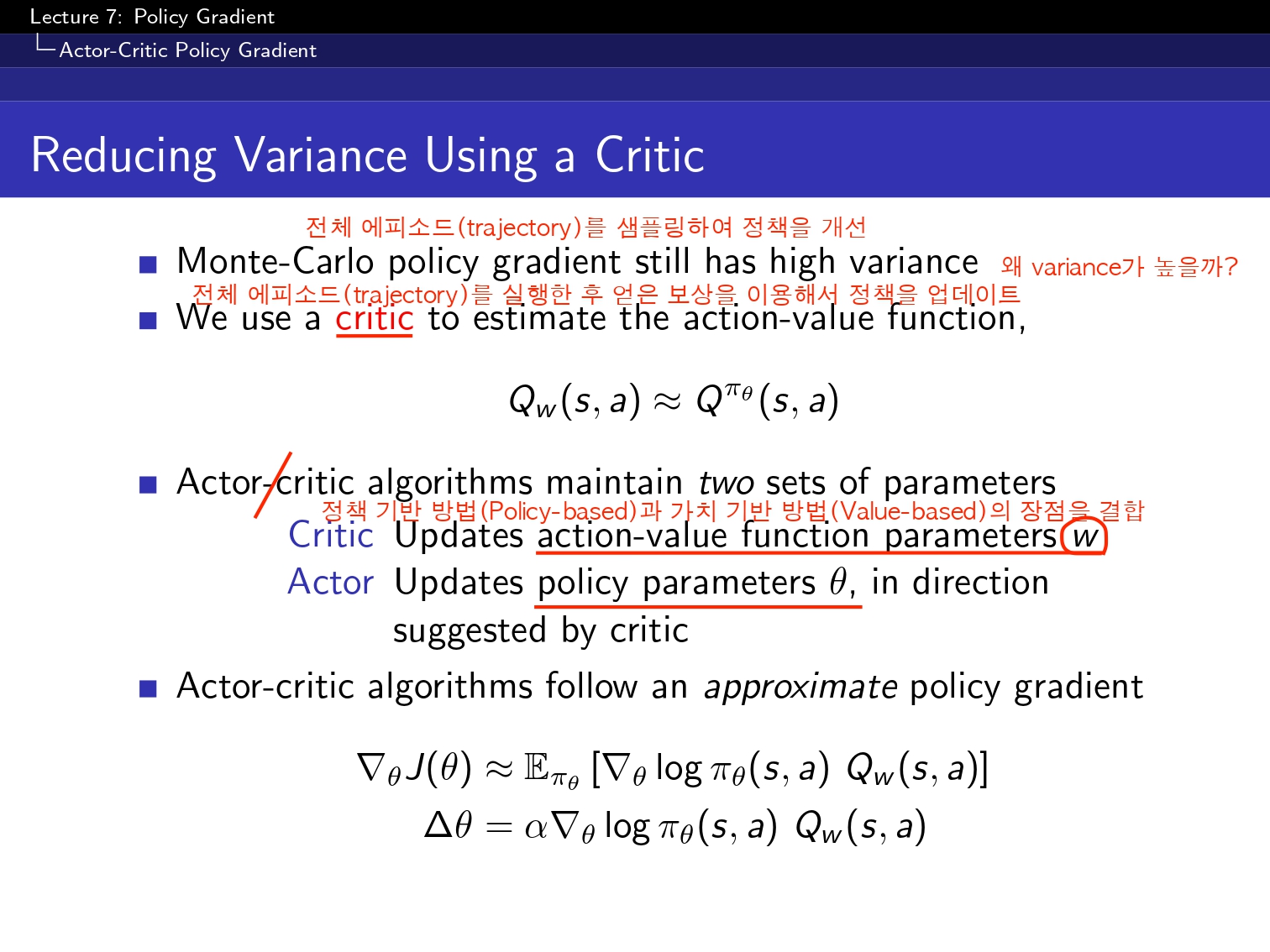
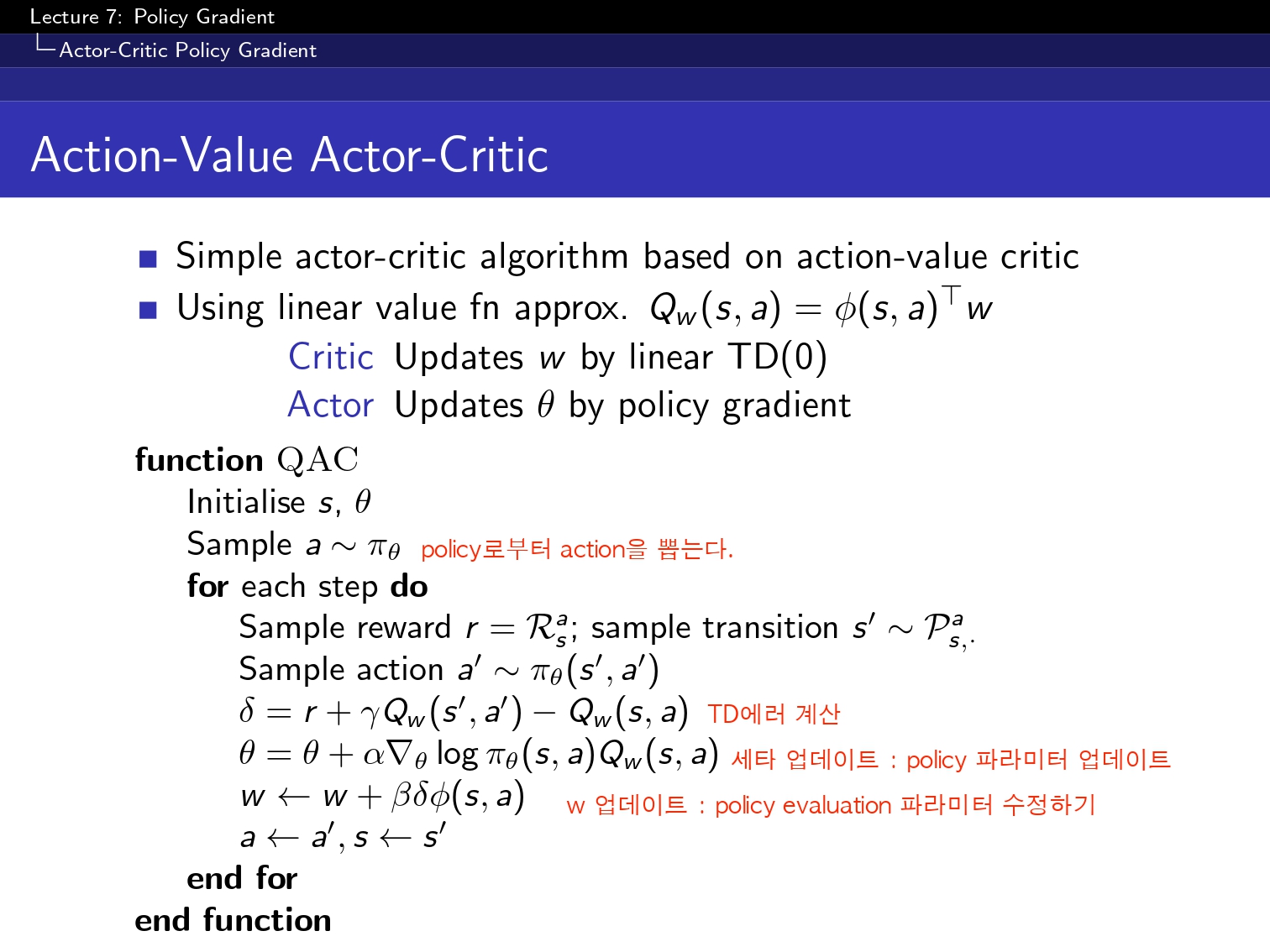
#### 2. Action Value Actor Critic ####
#==============================================================================
import numpy as np
num_states = 5
num_actions = 2
num_episodes = 5000
theta = np.random.randn(num_states, num_actions) # 각 상태에서 행동별 가중치
#원래 사실 theta를 어떻게 initialize 해야하는지 감이 안잡혔었음.
w = np.zeros(num_states * num_actions) # VFA에서 사용할 가중치 초기화
# Softmax 정책 함수
def softmax_policy(state, theta):
preferences = theta[state] # 해당 상태의 행동별 가중치 가져오기
exp_values = np.exp(preferences - np.max(preferences)) # 안정적인 softmax
return exp_values / np.sum(exp_values)
# 확률에 따라 행동 선택
def choose_action(state, theta):
probs = softmax_policy(state, theta)
return np.random.choice(num_actions, p=probs)
#행동 선택
# 한 번의 에피소드를 실행하면서 데이터를 모으는 코드 (Monte Carlo) : 이건 필요 x .왜냐면 매스텝마다 update하니까.
#def run_episode(theta, max_steps=10):
alpha = 0.01 # 학습률
gamma = 0.9 # 감가율 (할인율)
def feature_vector(state,action,num_states,num_actions):
vec = np.zeros(num_states * num_actions)
vec[state * num_actions + action] = 1
return vec
def VFA(state, action, w):
return np.dot(w, feature_vector(state, action, num_states, num_actions)) # 가중치와 특징 벡터의 내적
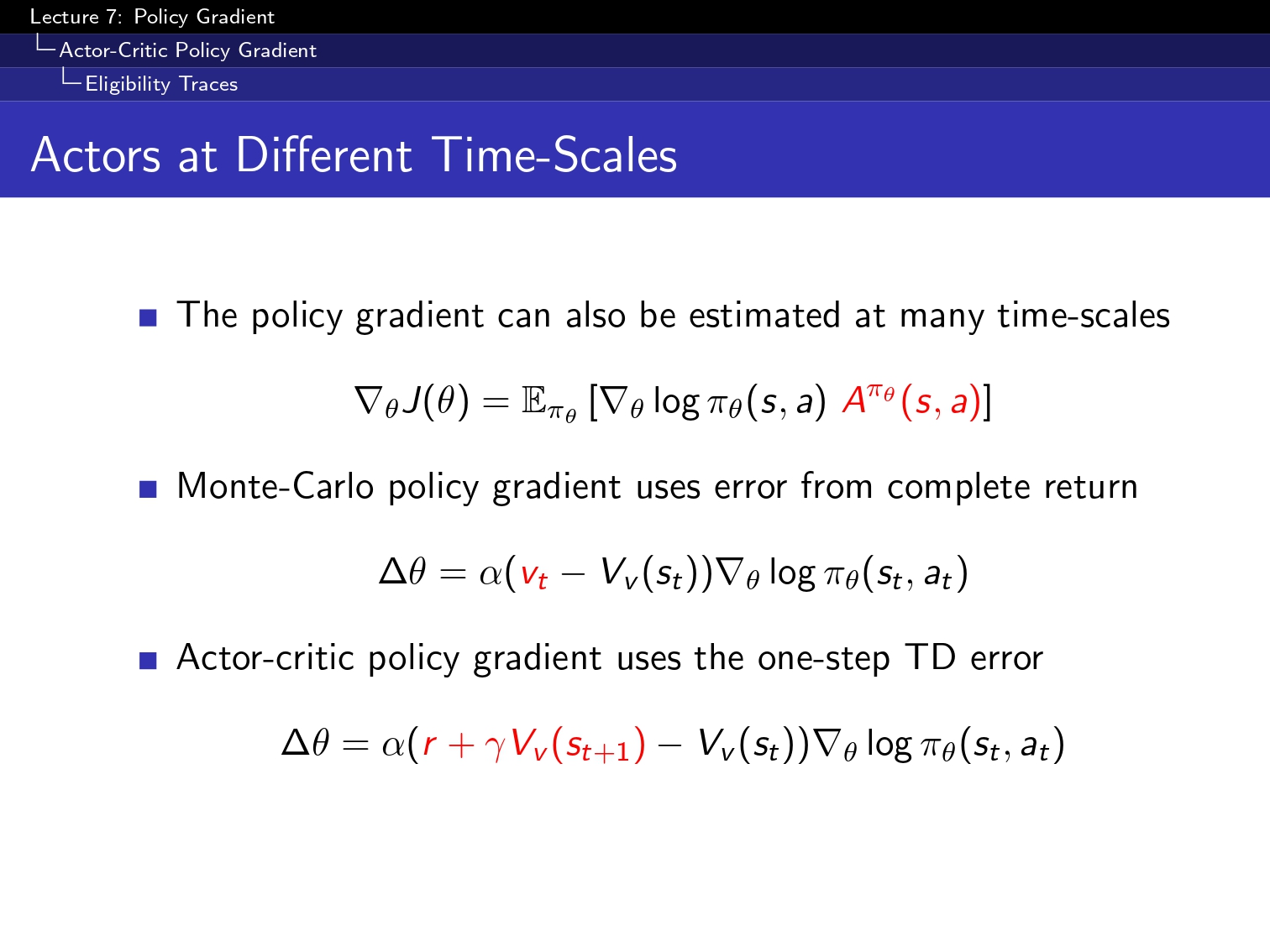
for episode_num in range(1, num_episodes + 1):
state = np.random.randint(0, num_states) # 초기 상태
action = choose_action(state, theta) #action 고르고
#여기서 state,action,reard in reversed(episode)할 필요가 없는 게, 이건 매번 update다.
for _ in range(10): # 최대 10 스텝
reward = np.random.randn() # 보상 샘플링
next_state = np.random.randint(0, num_states) # 환경에서 다음 상태 샘플링
next_action = choose_action(next_state, theta) # 정책에 따라 다음 행동 선택
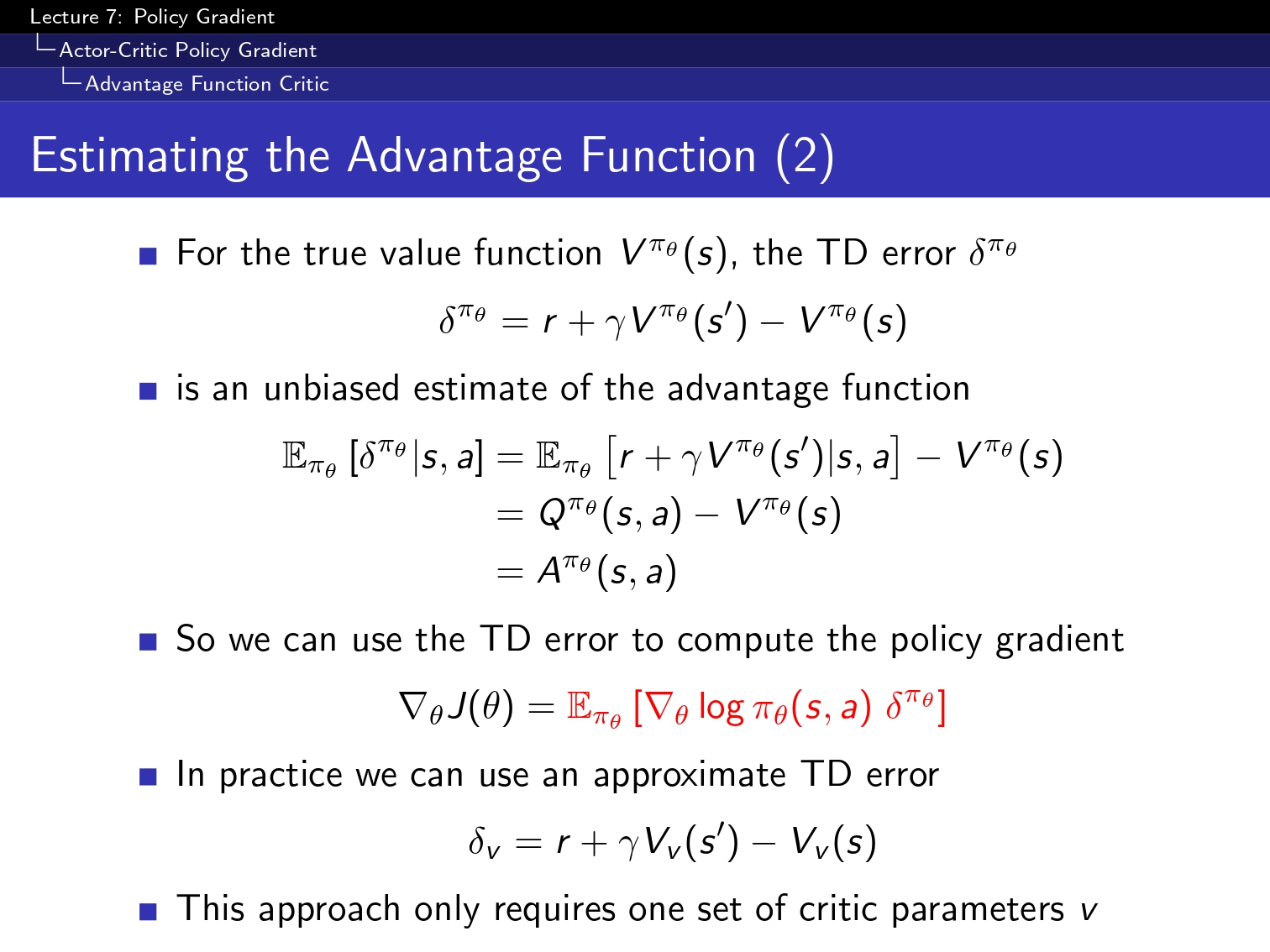
delta = reward + gamma * VFA(next_state, next_action, w) - VFA(state, action, w) # TD error
# 크리틱 업데이트 (w 업데이트)
w += alpha * delta * feature_vector(state, action, num_states, num_actions)
# 액터 업데이트 (theta 업데이트)
probs = softmax_policy(state, theta)
grad = np.zeros_like(theta[state])
grad[action] = 1 - probs[action]
theta[state] += alpha * grad * delta
# 다음 스텝으로 이동
state, action = next_state, next_action
# 학습된 파라미터 출력
print("Theta:")
print(theta)6강에 있는 내용들 그대로 이해하기 쉽게 조금만 바꿔서 해보았습니다!!!!!
5강에서 한번 개념 제대로 잡으니까, 그냥 지식 업데이트만 하면 되는 느낌이더라구용!!!
혹시 질문이 있다면,,,댓글을 남겨주세요!!

한발한발 나아갑니당!