YOLO v2

Make it better(정확도 향상)
-
Batch Normalization
- 2% 향상 in mAP
-
High resolution classifier
-
General : 256x256
-
Orignal Yolo: 224x224 -> detector 448x448
-
YOLOv2: fine the classification network(448x448)
-
10 epochs on ImageNet-> detector
-
4%향상 in mAP
-
-
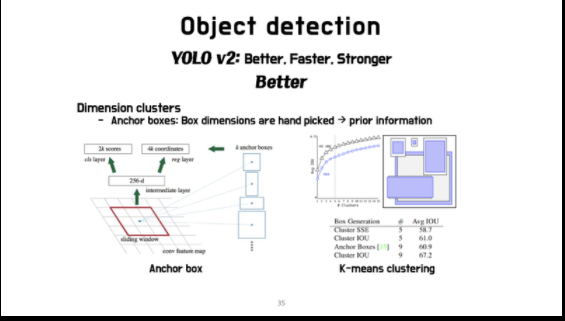
Convolutional Anchor boxes
-
Faster R-CNN: bbox예측
-
Original YOLO: FC를 사용하는 동안 bbox예측
-
YOLOv2
-
FC제거, anchor boxes사용
-
Shrink network: 416 input image
-
Conv layers: down sample (416x416->13x13)
-
-
Do it faster(detection 속도 향상)
-
Darknet-19
-
VGG16의존
-
YOLO: Googlenet
-
YOLOv2
- 3x3 filters(VGG와 유사)
- NIN(1x1 filters, 3x3 convolutions[병목현상])
- Darknet-19: 19 conv + 5 maxpooling
-

Makes us stronger(넓은 범위의 class예측)
9000개의 클래스를 분류하면서 검출까지 한다.
참고:https://dhhwang89.tistory.com/136
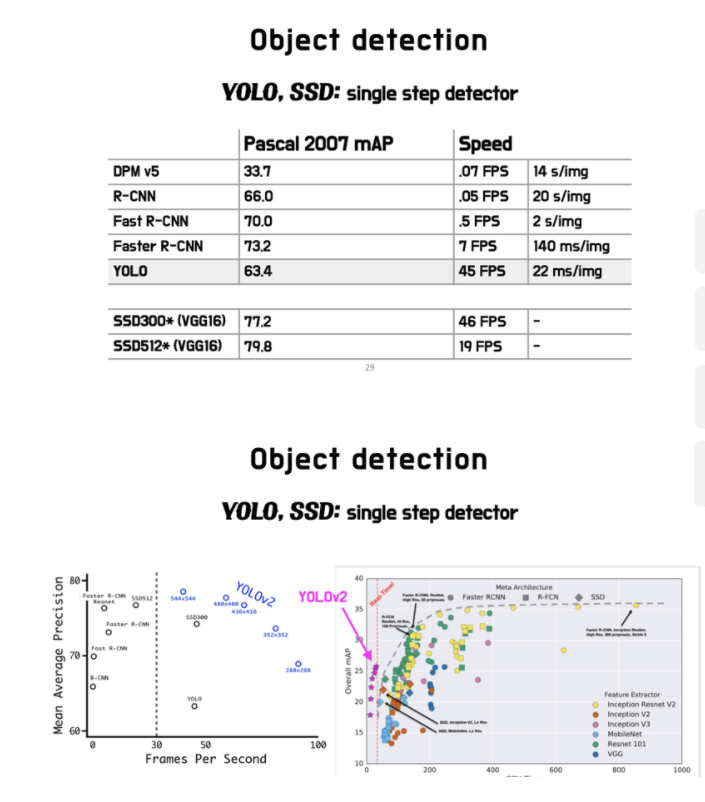
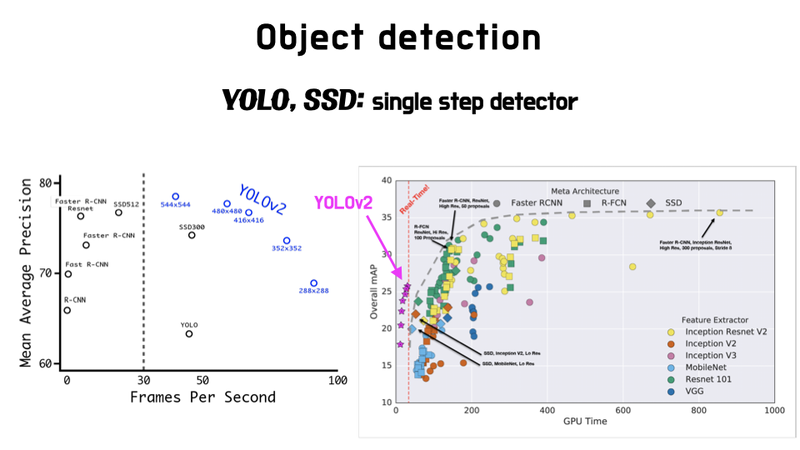
YOLO v2의 성능 비교
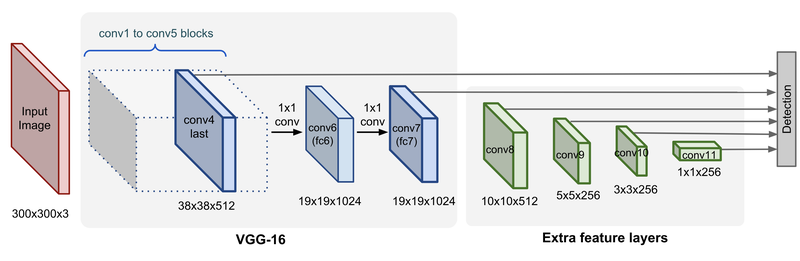
SSD(Single Show MultiBox Detector)
SSD는 YOLO v1에서 grid사용 후 생기는 단점 해결법 제시한다.
Image Pyramid
-
Image Pyramid
- VGG16 by pre-trained ImageNet
- Pooling layer by VGG, 하나의 image feature로 사용 가능
단점: feature map의 개수만큼 계산량이 많기에 너무 큰 특성맵의 경우 network가 충분히 깊지 않아 계산하기 힘들 수 있다.
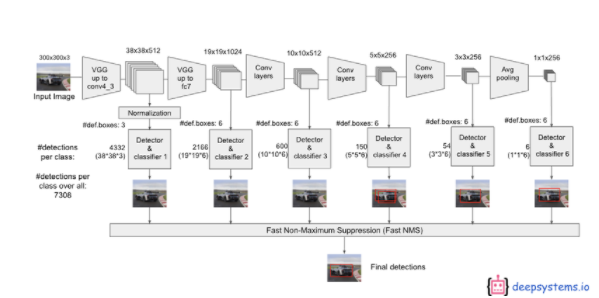
Workflow of SSD
- 배경
box정보(x,y,w,h)정보 예측하기 위한 정보가 없으므로 넓은 bbox분포를 다 학습할 수 없다. 즉, 성능 손실이 일어나게 되므로, anchor를 적용해야한다.
- Default box
bounding box(x,y,w,h)특성이 존재하므로 pre-defined된box를 적용하는 layer를 추가하면 성능 향상에 도움이 되는 것이다.
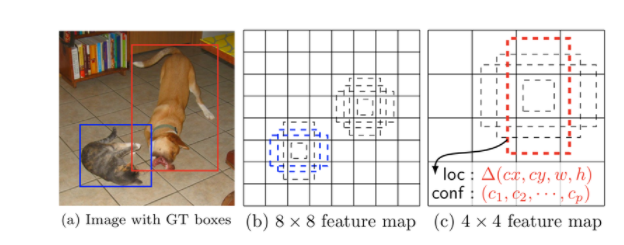
Frame work of SSD
-
a: 이미지 파일로 Ground Truth데이터셋
-
b: VGG Backbone에 가까운 fine-grained feature map(세밀하게 특징 분류하는 것으로, 비슷한 특징을 가진 class 분류)
-
receptive field가 넓은 4x4 feature map
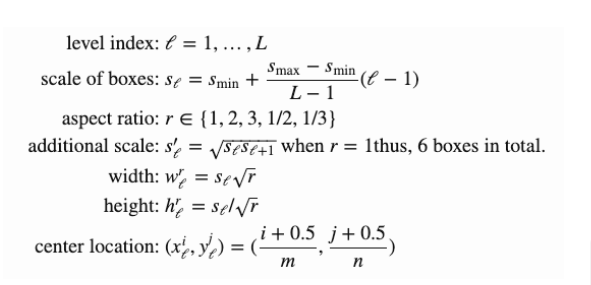
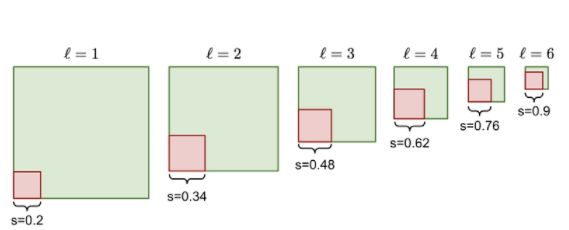
Scale for Default box
*식
*직관적 그림
즉, 학습할 이미지의 따라 aspect ration을 조정해야하지만 임의로 정하는 것은 비효율적이므로 KNN알고리즘 활용하면 된다.
SSD Loss functions
- Objective Loss function: Localization loss and Confidence loss의 가중합(weighted sum)

- Localization Loss function: 예측된 박스 l과 Ground truth box g파라미터 사이의 Smooth L1 Loss

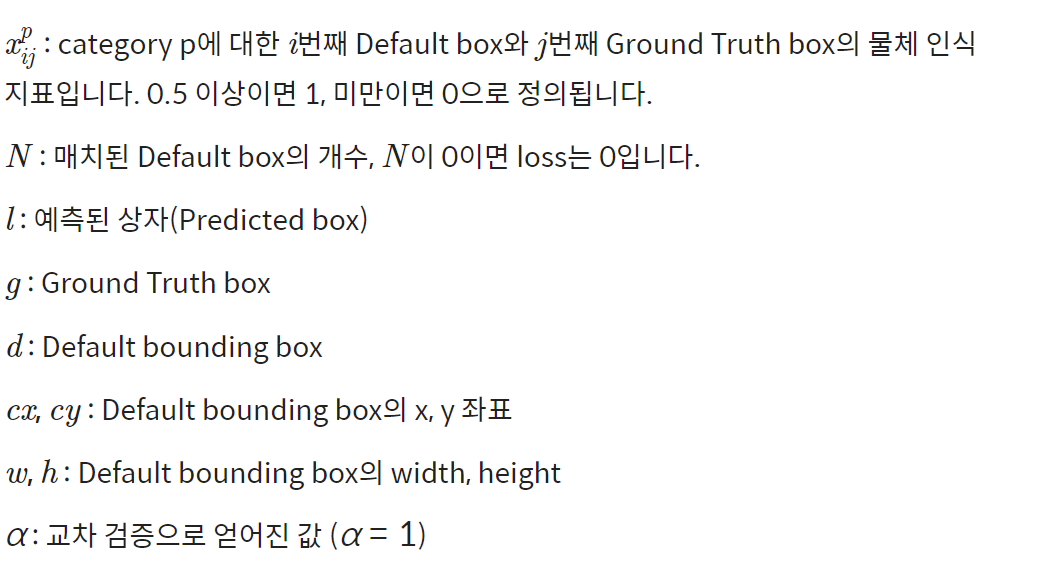
- Confidence Loss Function: 여러 loss의 confidence c의 softmax loss
매칭된 class에 softmax를 취하고 그렇지 않은 class은 1(배경) 과 0(배경아님)으로 나뉩니다.. 즉, 최종 predicted class score는 예측할 class+배경 class 지표
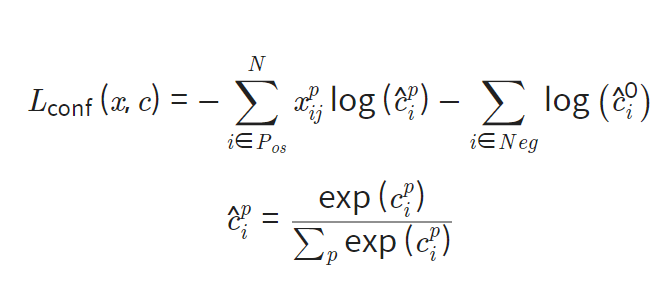
- 용어 정리
Hard negative mining
대부분의 Default box가 배경이기 때문에 마지막 class의 loss 부분에서는 positive:negative 비율을 1:3으로 정해 출력합니다. 즉 high confidence 순으로 정렬해 상위만 가져다 씁니다.
SSD성능