코드:링크텍스트
학습목차
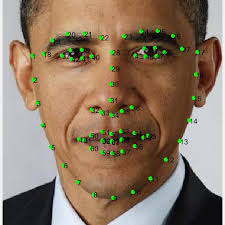
Dlib 얼굴인식의 문제점
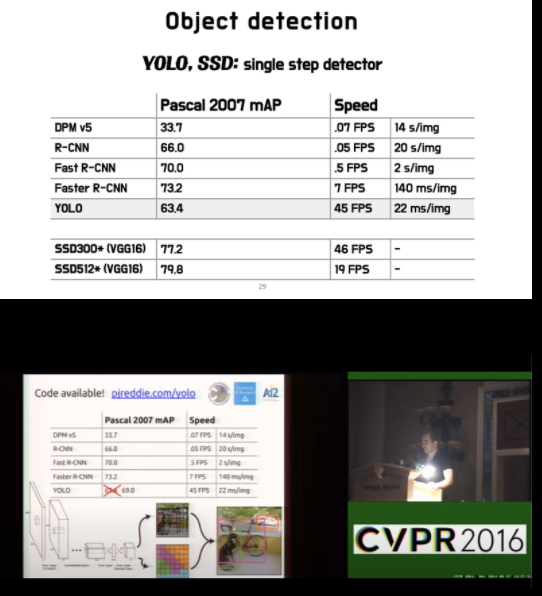
Single Stage Object Detection
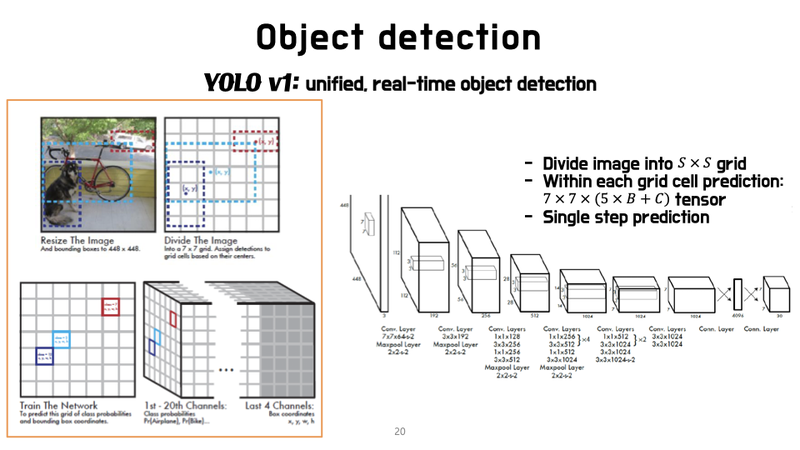
YOLO V1
Dlib 얼굴 인식의 문제점
- Face landmark
-
얼굴을 잘 못 찾는다.
-
동영상을 처리하기엔 너무 느리다.
-
얼굴각도, 방향, 크기 등의 변화에 취약하다.
-
Sliding window
- 많은 시간 소요
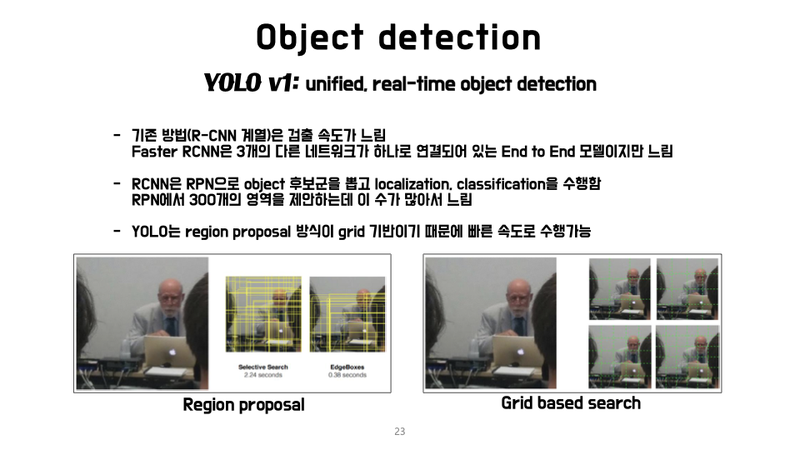
- 2-stage 방식의 detection
- 연산의 병렬화 불가
Single Stage Object Detection
2-stage detector의 실행속도는 느리기에 이 모델보다 가벼운 1-stage기반 사용 하는 것이 좋다.
YOLO
YOLO = You Only Look Once
YOLOv1
동작 원리
RCNN and YOLO
-
RCNN
물체 존재할 것 같은 곳을 backbone network로 표현(region proposal network)
-
YOLO v1
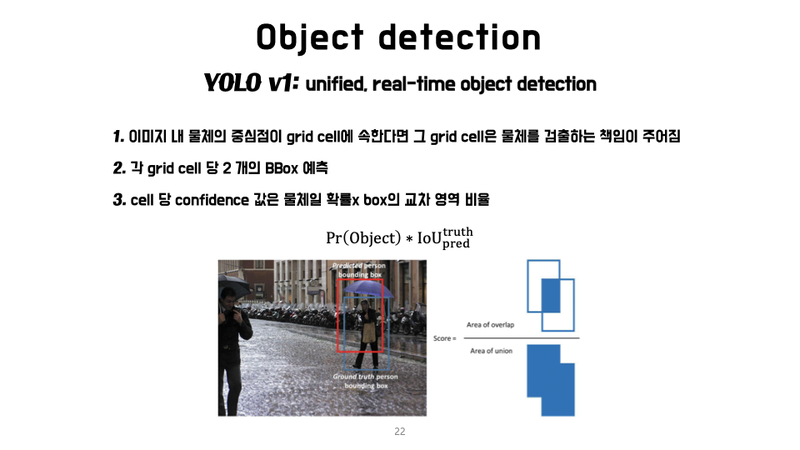
이미지 내의 작은 영역을 나누면 그곳에 물체가 있음(grid 내 물체 존재) 즉, grid는 고정하고, 각 grid 안에 물체가 있을 확률이 중요
- grid cell

- bounding box(bbox) and confidence score of box예측한다
confidence score는 bbox가 사물을 포함하는지에 대해 모델의 확신도이다
*bbox
x,y,w,h,confidence, 총 5개의 예측을 하고 (x,y)좌표는 bbox중심좌표이고 w와 h는 너비와 높이이다.
- C개의 조건부 class확률 예측한다

이 확률은 grid ceel이 사물을 포함한다는 조건을 갖는 확률로 bbox의 개수와 상관없이 각 grid cell의 확률 예측한다. 마지막 layer에서 사용된다.
고로, 예측값: SxSx(B * 5 + C)
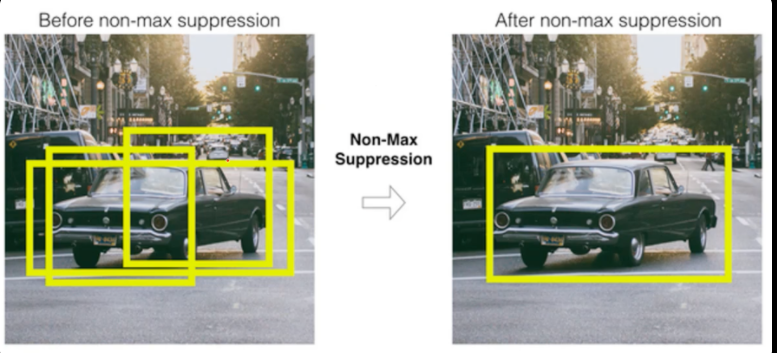
NMS
-
배경: 학습이 잘되어서 비슷한 크기의 bbox로 동일 물체를 잡을 시, bbox가 많아지는 단점 존재
-
등장: NMS
-
효과: 여러 bbox 중 가장 정확한 bbox선택기법, 중복제거
-
코드
def batch_iou(boxes, box):
"""Compute the Intersection-Over-Union of a batch of boxes with another
box.
Args:
box1: 2D array of [cx, cy, width, height].
box2: a single array of [cx, cy, width, height]
Returns:
ious: array of a float number in range [0, 1].
"""
lr = np.maximum(
np.minimum(boxes[:,0]+0.5*boxes[:,2], box[0]+0.5*box[2]) - \
np.maximum(boxes[:,0]-0.5*boxes[:,2], box[0]-0.5*box[2]),
0
)
tb = np.maximum(
np.minimum(boxes[:,1]+0.5*boxes[:,3], box[1]+0.5*box[3]) - \
np.maximum(boxes[:,1]-0.5*boxes[:,3], box[1]-0.5*box[3]),
0
)
inter = lr*tb
union = boxes[:,2]*boxes[:,3] + box[2]*box[3] - inter
return inter/unionIoU
bbox의 목표인 groud truth와 최대한 동일하게 학습하기 위해서 IoU사용한다
- 코드
def batch_iou(boxes, box):
"""Compute the Intersection-Over-Union of a batch of boxes with another
box.
Args:
box1: 2D array of [cx, cy, width, height].
box2: a single array of [cx, cy, width, height]
Returns:
ious: array of a float number in range [0, 1].
"""
lr = np.maximum(
np.minimum(boxes[:,0]+0.5*boxes[:,2], box[0]+0.5*box[2]) - \
np.maximum(boxes[:,0]-0.5*boxes[:,2], box[0]-0.5*box[2]),
0
)
tb = np.maximum(
np.minimum(boxes[:,1]+0.5*boxes[:,3], box[1]+0.5*box[3]) - \
np.maximum(boxes[:,1]-0.5*boxes[:,3], box[1]-0.5*box[3]),
0
)
inter = lr*tb
union = boxes[:,2]*boxes[:,3] + box[2]*box[3] - inter
return inter/unionYOLO의 특징
-
이미지를 S x S개의 grid로 나누기
-
bbox의 좌표와 confidence score예측/ 1 grid
-
결과: real-time object detector
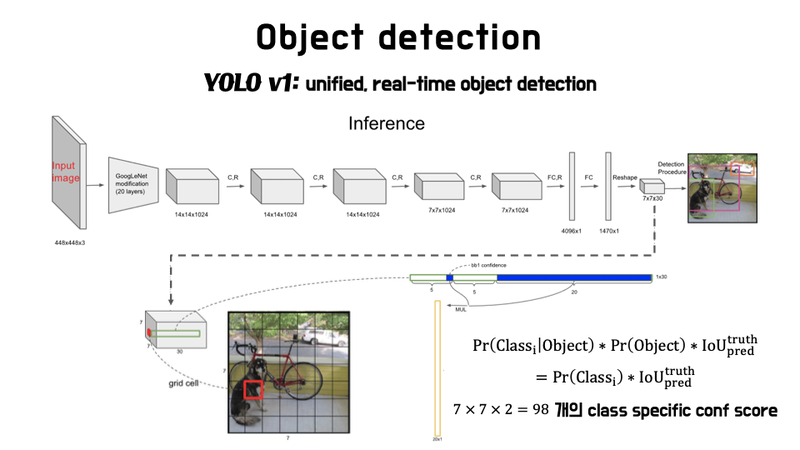
Inference 과정
-
조건부 C의 Class구하기
-
box의 confidence prediction과 곱하기
-
class- specific confidenc score얻음
-
이 score이 예측된 box가 실제 사물과 잘 일치하는 지 알려줌
-
NMS수행
-
class and bbox location of object 결정 가능
성능
loss함수

성능