이번에는 Thread(스레드)에 대해 알아보도록 합시다.
Thread란 무엇일까?
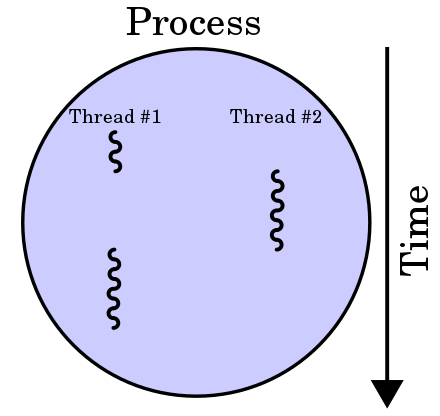
Thread의 기본적인 정의는 어떠한 프로그램 내에서, 특히 프로세스 내에서 실행되는 흐름의 단위를 뜻합니다. 흔히 우리가 아는 프로레스는 사실 하나의 프로그램이고 그 프로세스는 적어도 하나의 이상의 스레드를 가지게 되는 것이죠. 같은 코드를 실행하는 각기 다른 Program Counter가 있다고 생각하시면 쉬울 겁니다. 스레드는 address space를 공유합니다. 즉 같은 코드와 데이터를 가지고 각기 다른 부분을 실행하는 것이지요. 다만 각각의 스레드는 자신만의 stack과 register(including PC)을 가지게 됩니다. 병렬성을 위한 존재하는 만큼 context switching이 가능하며 그 단위로 TCB(Thread Control Block)을 가집니다. 요즘 대부분의 프로그램들은 Mult-threaded로 만들어지고 있죠.
왜 우리는 스레드를 사용해야 할까요?
- Parallelism - 여러 개의 processor가 장착된 컴퓨터에서 여러 스레드를 돌린다면 빨라지겠죠?
- I/O overraping - 하나의 프로세서라도 어떤 스레드가 I/O를 기다리고 있는 동안 다른 스레드가 돌아간다면 매우 효율적일 것입니다.
- light-weight - 프로세스보다 스레드를 만드는 것이 훨씬 가벼운 작업입니다.
스레드는 데이터를 공유한다
다만, 이와 같은 특징으로 인해 logically separate한 task에서는 스레드보다 프로세스가 더 나을 수 있습니다. 그러나 같은 코드를 나누어 동시적으로 실행한다는 장점 때문에 어플리케이션들에서는 Update display, Fetch data, Answer a network request와 같이 해야하는 일을 동시다발적으로 돌려 빠르게 효율성을 극대화하고 있습니다.
(+ 커널 또한 Multithreaded입니다.)
다시 정리하자면,
- Responsiveness - 프레세스의 어느 부분이 잠시 막히더라도, 더
user interface와 같이 더 중요한 작업들을 계속해서 해나갈 수 있습니다. - Resource Sharing - 스레드의 가장 큰 특징으로 스레드들끼리는 리소스를 공유합니다.
- Economy - 프로세스보다 훨씬 가볍습니다.
- Scalability - 멀티 프레세스 시스템에서 프로세스들이 이득을 볼 수 있는 것은 다 스레드가 있기에 가능한 일입니다.
Thread의 치명적 문제점
데이터를 공유한다는 스레드의 가장 큰 특징은 사실 스레드의 가장 큰 약점이 되기도 합니다.
아와 같은 상황을 생각해 봅시다.
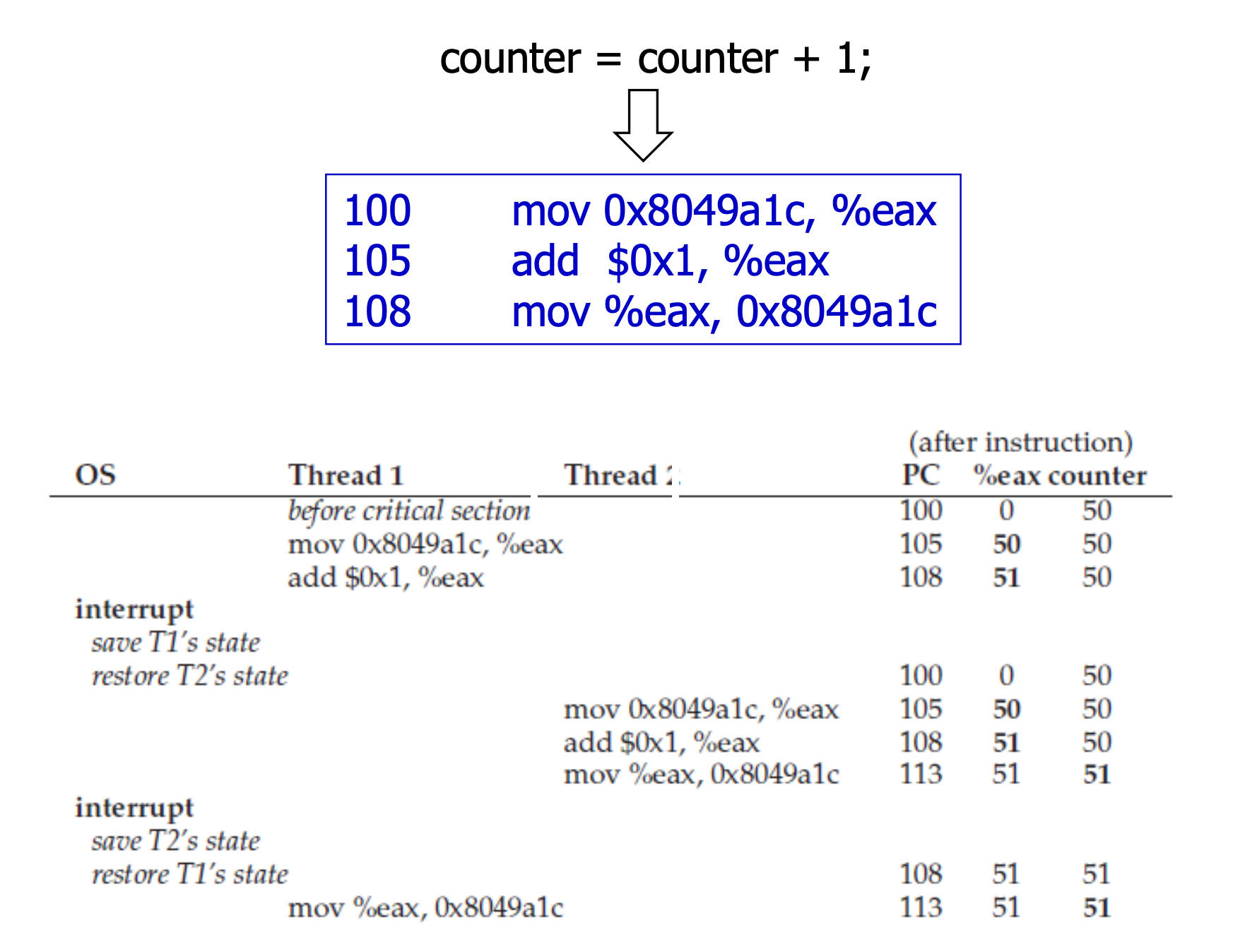
counter = counter + 1이라는 코드를 수행하는 과정입니다. 내부적으로 위와 같이 fetch하고 add연산한 뒤 store하는 일련의 어셈블리 과정을 내포하고 있죠. 그런데 만약 한 스레드가 fetch하고 add를 하는데 store를 하기 전에 다른 스레드로 context switching이 일어났다고 생각해 봅시다. 그렇다면 이 스레드는 전 스레드가 업데이트를 하기 전의 값을 fetch하게 됩니다. 결과적으로 두 스레드가 모두 store하는 값은 51로 같은 값이 되기 때문에 두 번의 연산으로 예상되는 결과가 벌어지지 않는 것입니다. 이를 indeterminate하다라고 표현하며 이와 같은 상황을 Race Condition이라고 합니다.
- Race Condition - 위와 같이 실행 시점의 타이밍이 맞지 않는 문제로 indeterminate하게 이루어지는 결과를 뜻합니다
- Critical Section -
shared variable에 접근하는 구역으로, Race Condition을 방지하기 위해 두 개 이상의 스레드가 실행되서는 안되는 구역입니다. - Mutual Exclusion - 한 스레드가 Critical Section을 실행하고 있을 때 다른 스레드가 해당 Critical Section을 실행하지 못하게 보장하는 것입니다.
- Critical Section -
따라서 우리는 한 번에 끝내야 하는 코드 section을 보장해야합니다. 이를 위해 해당 코드 section 수행 중 다른 스레드로 context switching이 일어나는 것을 방지해야 한다는 것을 의미하기도 합니다. 이를 atomic해야 한다고 말하기도 합니다. atomic은 중간에 멈추는 것 없이 아예 다 실행이 안되거나 아예 다 실행히 한 번에 이루어져야 함을 뜻합니다.
다행히도 많은 복잡한 atomic instruction 필요 없이, 하드웨어가 synchronization primitives를 위한 몇 가지 명령어들을 제공합니다.
Race Condition을 해결해보자
Thread를 만들고 관리하기 위해 Thread 라이브러리는 프로그래머들에게 API를 제공합니다. 우리는 그 중 Pthreads라는 라이브러리를 이용할 것입니다.
Pthreads
Thread creation과 synchronization을 위해 만들어진 POSIX standard API입니다. 눈여겨볼 점은 이 라이브러리는 user-level과 kernel-level 모두 동작한다는 것입니다. 사용방법은 아래와 같이 기존 컴파일 명령어에 -Wall -pthread를 덧붙이기만 하면 됩니다.
#include <pthread.h>
int pthread_create(pthread_t * thread,
const pthread_attr_t * attr,
void* (*start_routine)(void*),
void* arg);
int pthread_join(pthread_t thread, void **value_ptr);pthread_create로 스레드를 생성하면 스레드가 함수 포인터로 전달된 start_routine 함수를 실행합니다. pthread_join은 해당 스레드가 끝날 때까지 기다린 후, return 값의 포인터를 value_ptr에 받습니다. 다만 여기서 , 중요한 점은 위에서 설명했듯이 스레드는 각각의 Stack을 가지기 때문에 함 수 내에서 선언된 지역 변수에 대한 포인터를 return해봤자 의미 없다는 것입니다.
Locks
또한 pthread에서 critical section에 대한 mutual exclusion을 제공하기 위해 Locks를 제공합니다. 한 스레드가 어떤 pthread_mutex_t 변수에 lock을 걸었다고 해봅시다. 그러면 unlock을 할 때까지 다른 스레드는 해당 변수에 lock을 걸지 못합니다. Lock에 대해서는 다음 포스트에서 제대로 다룰 예정입니다.:smile:
아래와 같이 Lock의 intilaization에는 다음과 같은 정적 및 동적 초기화가 있다는 것만 알아둡시다.
pthread_mutex_lock = PTHREAD_MUTEX_INITIALIZER;
int rc = pthread_mutex_init(&lock, NULL); assert(rc == 0);계속 lock이 되기만을 기다리기는 비효율적입니다. 그래서 lock을 시도해본 뒤 걸려있으면 failure을 반환하는 trylock이나 lock을 요청하고 설정한 시간이 지나면 failure을 반환하는 timedlock등이 있습니다. 이것들은 추후에 설명할 deadlock을 방지하기 위한 함수들입니다.
Condition Variables
어떠한 스레드가 다른 스레드와 관계성을 가지기 위해, 예를 들어 다른 스레드가 특정 조건을 만족할 때까지 기다려야 할 때 우리는 가장 먼저 아래와 같이 Shared Variable을 이용하는 방법을 생각해볼 수 있을 겁니다.

ready라는 공유 변수를 이용해서 한 스레드는 다른 스레드가 ready = 1을 수행할 때까지 실행이 되어서는 안되는 것입니다. while(ready == 0);과 같이 기다리는 상황을 Spin이라고 표현합니다. 다만 이는 스레드가 Running일 때 계속해서 반복문을 수행하면서 CPU 사이클을 잡아먹고 에러까지 도출될 수가 있습니다. 그래서 pthread에서는 아래와 같은 Condition Variable을 제공합니다. 이 또한, 이후 포스트에서 제대로 다룰 예정이니 이쯤에서 넘어가도록 하겠습니다.🙂
번외
스레드에 대해 나머지 여러가지 사실 들을 알아봅시다.
- 스레드는
User threads와Kernel threads로 나뉩니다. - 스레드라는 개념이 북상하면서, 프로그래머가 직접 생성 및 관리를 하는 Explicit이 아닌 컴파일러나 라이브러리가 생성 및 관리를 하는
Implicit Threading의 개념이 있습니다. - 애초에 여러 스레드를 생성하여 큰 스레드의 집합을 만든 뒤 필요한 request를 Queue하는
Thread Pool이라는 개념이 있습니다. - 굳이 thread를 생성하지 않아도
OpenMP에서는#pragma omp parallel을 사용하면 해당 구역에 대해 코어 수에 따라 가능한 많은 스레드를 알아서 돌려서 처리해 줍니다. Linux에서는 threads라는 표현보다는tasks라는 표현을 주로 사용합니다.clone()명령어는 parent task의 주소 공간을 공유하는 child task를 만들어 줍니다.
