참고자료
https://www.youtube.com/watch?v=hdbv1FWOclc&t=80s
https://darkpgmr.tistory.com/83
https://darkpgmr.tistory.com/78
Epipolar geometry란?
스테레오 비전(stereo vision, 2-view)에서의 기하를 일컫는다. 동일한 사물/사람 장면을 서로 다른 두 지점에서 획득했을 때 매칭 쌍들 사이의 기하학적 관계를 다룬다.
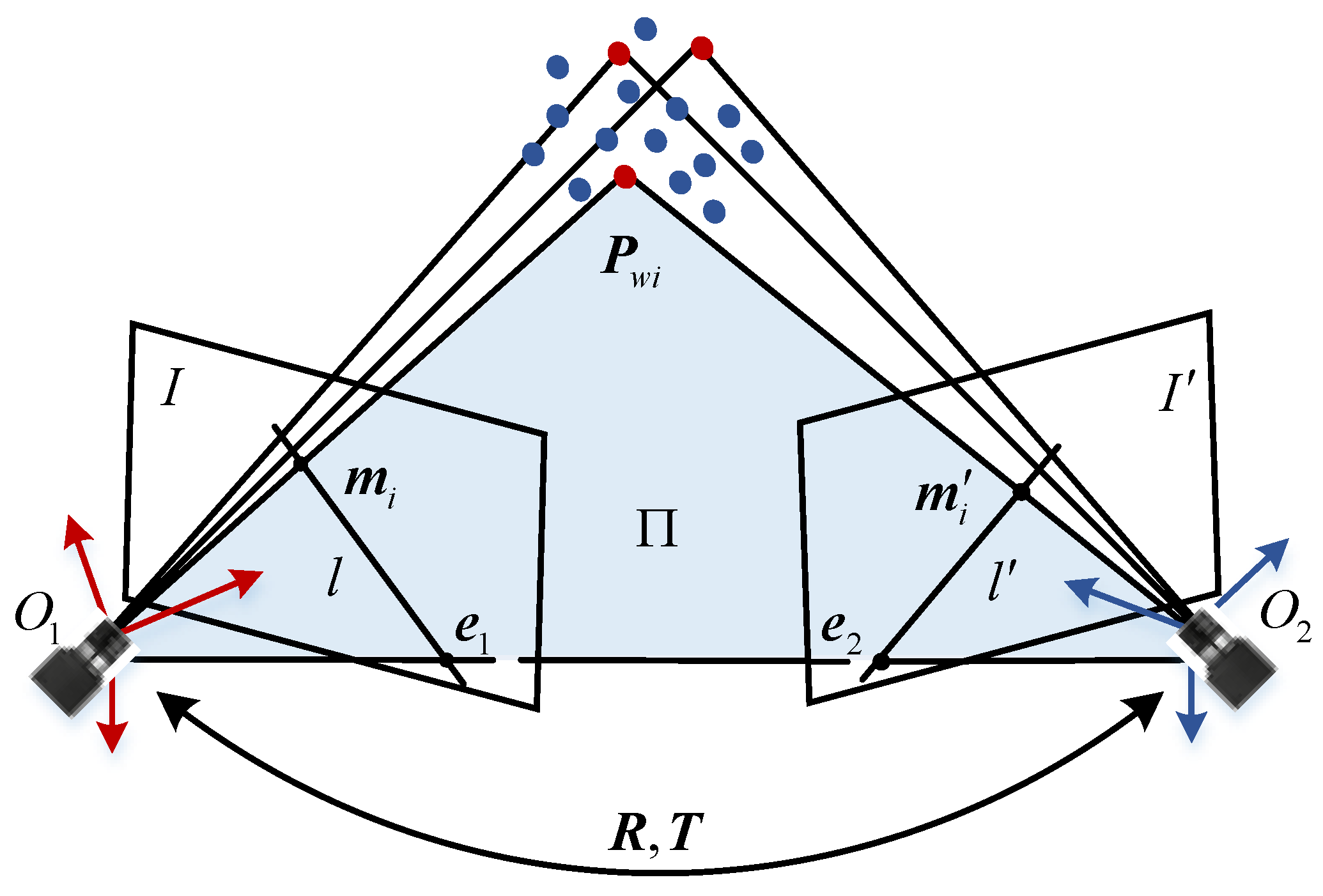 출처: A Global Fundamental Matrix Estimation Method of Planar Motion Based on Inlier Updating(논문)
출처: A Global Fundamental Matrix Estimation Method of Planar Motion Based on Inlier Updating(논문)
용어정리
- : 이미지 상에 맺힐 3차원 공간상의 점
- : 각 영상의 카메라 센터
- : 각 영상에서의 매칭쌍
- : epipole, 반대 영상의 카메라 센터가 해당 영상의 이미지 상에 맺힌 점 혹은 두 카메라 원점을 잇는 선과 이미지 평면이 만나는 점
- : epipolar line, 각 영상에서 epipole()과 이미지 상의 점()을 이은 선
기본 개념
두 카메라 위치 사이의 기하학적 관계 [R|T]를 알고 있고 영상 1에서의 영상좌표 m을 알고 있을 때, 점 P까지의 depth정보를 모른다면 영상좌표 으로부터 투영되기 전의 3차원 좌표 P를 복원할 수 없다. 그러므로 점 P가 영상 2에 투영된 좌표 또한 유일하게 결정할 수 없다. 반면, P는 와 을 잇는 직선(ray)상에 존재하므로, 이 선이 반대 영상에 투영된 은 유일하게 존재한다. 이때, 1영상에서 2영상으로 대응되는 epipolarline()의 관계를 나타내는 행렬이 F, E(Fundamental, Essential)행렬이다. E, F 행렬은 두 이미지의 매칭쌍으로 카메라 이동행렬의 관계[R|T]를 정의한다. 이때, epipolar line을 이용한 제약식을 epipolar constraint 라고 한다.
E(Essential Matrix)
정규화된 이미지 평면에서의 매칭쌍들 사이의 기하학적 관계를 설명하는 행렬
3D 공간상의 한 점 P가 영상 1에서는 에 투영되고, 영상 2에서는 에 투영됐다고 하면 아래 관계를 만족하는 행렬이 항상 존재한다는 것이 epipolar geometry의 핵심이다.
F(Fundamental Matrix)
카메라 파라미터까지 포함한 두 이미지의 실제 픽셀(pixel)좌표 사이의 기하학적 관계를 표현하는 행렬
결론은 두 이미지 평면 간의 기하학적 관계가 주어지고(E, F), 두 이미지 평면상의 매칭쌍이 주어질 경우 -> 3D 공간상의 좌표 를 결정할 수 있다. 즉, 스테레오 비전에서 거리(depth)를 구할 수 있다.
