행렬과 벡터의 변환
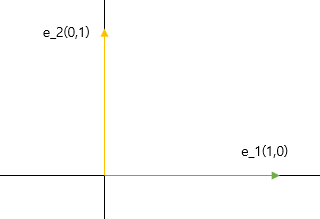
위와 같은 표준기저벡터 e1(1,0),e2(0,1)가 있다.
이 공간의 벡터 v=(x,y)는 표준기저벡터의 결합이다.
v=(x,y)=x∗(1,0)+y∗(0,1)
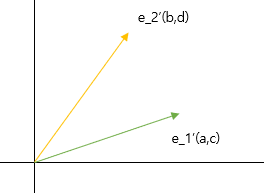
변환에 의해 아래의 새 벡터 e1′(a,c),e2′(b,d)가 생성된다고 가정하자. 이 공간에서도 똑같이 벡터 w는 다음과 같다.
v=x∗(a,c)+y∗(b,d)=(ax+by,cx+dy)
이 식은 다음 행렬의 곱과 같다.
[acbd]∗[xy]=[ax+bycx+dy]
a,b,c,d로 이루어진 2x2 정방행렬에 벡터 v를 곱한 것이다. (a,c)와 (b,d)는 2x2정방행렬의 열벡터이다.
크기 변환행렬
물체의 크기를 변환하는 행렬로, 벡터 공간의 각 표준기저벡터를 특정 크기만큼 바꾼다.
표준기저벡터 e1(1,0),e2(0,1)가 있을 때를 예로 들어보자.
e1를 a배로 변환하는 경우 a∗(1,0)=(a,0)
e2를 b배로 변환하는 경우 b∗(0.1)=(0,b)
e1,e2를 각각 a,b배로 변환한 표준기저벡터 (a,0),(0,b)를 열벡터로 설정해 만들어낸 크기 변환행렬은
[a00b] 와 같다.
회전 변환행렬
특정한 각도 θ 만큼 물체를 회전시키는 행렬이다.
먼저 표준기저벡터 e1,e2를 90∘와 −90∘ 변환하는 벡터를 구하자.
e1를 90∘로 회전하는 경우 (0,1)
e2를 90∘로 회전하는 경우 (−1,0)
90∘ 회전 변환행렬은 [01−10]이다.
e1를 −90∘로 회전하는 경우 (0,−1)
e2를 −90∘로 회전하는 경우 (1,0)
−90∘ 회전 변환행렬은 [0−110]이다.
이를 보다 일반화하여 특정한 각도 θ만큼 회전한 경우를 가정해보자.
e1를 θ만큼 회전하는 경우 (cosθ,sinθ)
e2를 θ만큼 회전하는 경우 (−sinθ,cosθ)
θ 회전 변환행렬은 [cosθsinθ−sinθcosθ]이다.
전단 변환행렬
전단 변환이란 특정 축을 고정하고 다른 축을 밀어 대각선으로 이동시키는 것을 의미한다. e1를 고정시키고, e2를 a만큼 민다면
e1는 고정이므로 그대로 (1,0)
e2는 (a,1)이 된다.
따라서 e1를 고정시키고, e2를 a만큼 민 전단 변환행렬은 [10a1]이다.
역행렬
행렬도 함수의 성질을 지니며, 덕분에 각각 항등함수와 역함수에 대응되는 항등행렬과 역행렬이 존재한다.
항등행렬
원래 기존의 벡터공간을 변화없이 동일하게 변환하는 행렬이다.
항등행렬을 적용해 변환한 행렬은 표준기저벡터 e1(1,0),e2(0,1)가 그대로 유지된다. 따라서 I로 표시되는 항등행렬은 다음과 같다.
I=[1001]
역행렬
그렇다면 반대로 역행렬은 어떠한 행렬과의 곱셈이 항등행렬이 나오는 특수한 행렬이다. 임의의 행렬을 A라고 할 때, 이의 역행렬A−1과의 곱 A∗A−1=I이다.
행렬식
어떤 특정한 행렬이 역행렬을 갖는지 알아낼 수 있는 특수한 식이다.
함수가 역함수를 가지려면, 그 함수는 전단사함수여야 한다. 마찬가지로 행렬이 역행렬이 존재하려면 두 공간의 변환이 전단사로 대응되어야 한다.
어떤 행렬 A=[acbd]의 행렬식 det(A)는 아래와 같다.
det(A)=ad−bc
만일,det(A)가 0이 된다면 해당 변환은 전단사 대응이 성립하지 않아 역행렬이 존재하지 않는다고 말한다.
크기 변환행렬의 역행렬
S=[a00b],S−1=[1/a001/b]
회전 변환행렬의 역행렬
S=[cosθsinθ−sinθcosθ],S−1=[cosθ−sinθsinθcosθ]
전단 변환행렬의 역행렬
S=[10a1],S−1=[10−a1]
행렬 곱의 역행렬
합성함수에서의 (g ∘ f)−1=f−1 ∘ g−1 규칙이 있었다.
마찬가지로 행렬의 곱도 같은 규칙이 존재한다.
(A∗B)−1=B−1∗A−1
