Paper link : https://arxiv.org/pdf/1406.2661.pdf
1. Introduction
- GAN모델은 Generator(G, 생성기)와 Discriminator(D, 판별기)의 2개의 네트워크가 적대적으로 학습하며 이미지를 생성합니다.
- 논문에서 Generator와 Discriminator의 관계를 지폐위조범과 경찰의 관계에 비유합니다. 경찰(Discriminator)는 실제 지폐와 위조 지폐를 잘 구분할 수 있도록 학습되며, 지폐 위조범(Generator)은 경찰(Discriminator)이 생성된 위조 지폐를 실제 지폐라고 판단할 수 있도록 정교하고 사실적으로 만들도록 학습을 진행합니다.
2. 다변수 확률 분포
-
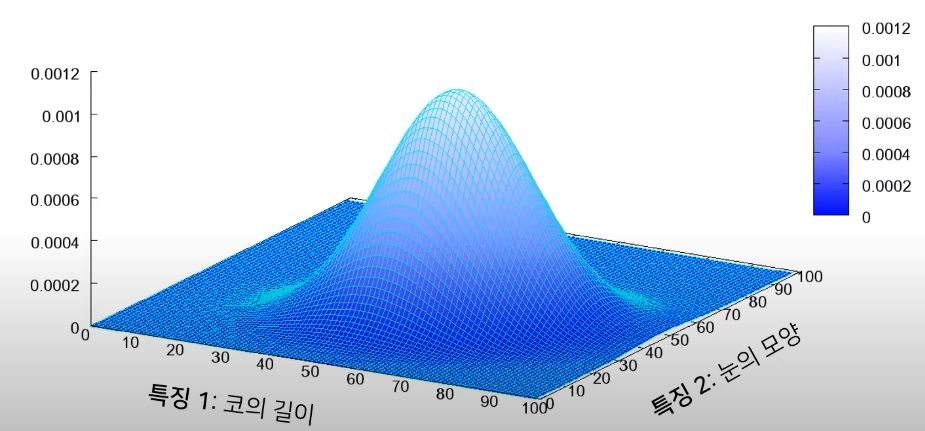
image, audio, text 등의 데이터는 데이터 내의 feature를 기저로 삼은 고차원 공간 내에서 한 점으로 표현될 수 있습니다.
-
고차원 공간에서 한 점으로 표현된 데이터를 근사한 모델은 평균이나 분산과 같은 통계값을 가지게 되며, GAN 모델은 각각의 Class에 대한 데이터의 분포를 학습합니다.
-
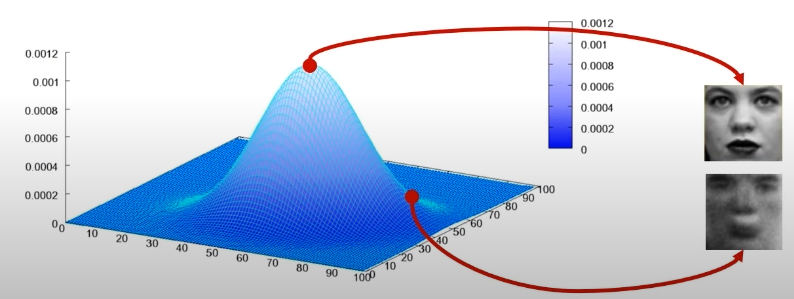
데이터의 통계치를 가장 잘 반영한 분포를 학습한다면 더 좋은 데이터를 생성할 수 있게 되며, GAN Model은 확률이 높은 부분에서 noise를 삽입하며 사실적인 데이터를 생성할 수 있도록 학습이 진행됩니다.
3. GAN Model
3.1. Objective function
-
GAN 모델의 목적함수는 다음과 같습니다.

-
목적함수 V(D,G)는 판별기(D) 관점에서 높은 값을 가질 수 있도록 학습됩니다.
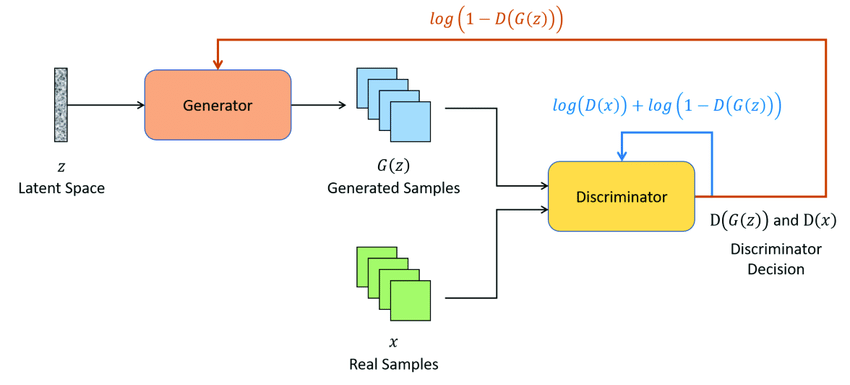
- D(x)는 입력된 x가 실제 데이터일 확률을 반환합니다. 이상적으로는, x가 실제 데이터에서 sampling된 데이터라면 1의 값을, 생성된 이미지에서 sampling된 허구의 데이터라면 0의 값을 반환합니다.
- ~ 는 실제 데이터의 분포에서 데이터 x를 sampling한다는 의미입니다. 목적함수가 D의 관점에서 높은 값을 도출해야하므로 는 실제 데이터 분포에서 sampling된 데이터에 대해서 높은 값인 1에 가까운 값을 반환할 수 있도록 학습이 진행됨을 의미합니다.
-
목적함수 V(D,G)는 생성기(G) 관점에서 낮은 값을 가질 수 있도록 학습됩니다.
- 생성기(G)는 Latent vector, noise vector를 입력받아 실제 데이터를 변형하여 데이터를 생성합니다. 는 noise z를 sampling함을 의미하며, G(z)는 생성기가 noise를 입력받아 데이터를 생성함을 의미합니다.
- 는 noise z를 입력받아 생성된 이미지를 판별기(D)에 의해 판별되는 과정을 의미합니다. 생성기(G)의 관점에서 목적함수는 작은 값을 가져야하므로 1-D(G(z))가 작은 값을 가지도록, 즉 D(G(z))가 1에 가까운 큰 값을 가지도록 학습됩니다.
- 따라서, noise z의 입력으로 생성된 이미지를 판별기(D)가 실제 데이터 분포에서 sampling되었다고 착각할 수 있을 만큼 사실적이고 정교하게 만들어지도록 설정되며, 앞서 말씀드린 대로 판별기(D) 관점에서 목적함수는 큰 값을 가져야하므로 생성된 허구의 데이터를 허구의 데이터라 분류하여 0에 가까운 값을 반환할 수 있도록 학습됩니다.
3.2 그래프 표현
- 목적 함수를 그래프로 표현하면 다음과 같이 표현될 수 있습니다.
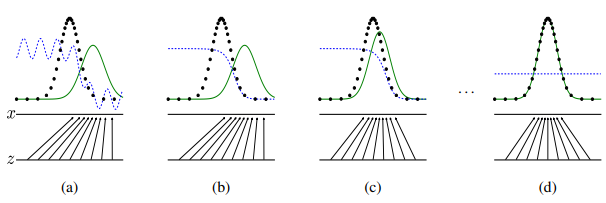
- blue line : Disciriminative distribution (판별기 반환값의 분포)
- black line : 실제 데이터의 분포
- green line : Generative distribution (생성된 데이터의 분포)
- 학습 초기(a)에 생성된 데이터의 분포는 실제 데이터의 분포와 차이가 크며 판별기 또한 부분적으로 정확한 판별을 시행합니다.
- 학습이 진행되며 생성된 데이터의 분포는 실제 데이터의 분포와 유사해지도록 학습되며 학습이 충분히 이루어진 상황(d)에서는 판별기가 실제 데이터와 생성된 데이터를 구분하지 못하는 상태, D(x) = 0.5의 값이 반환하도록 학습됩니다.
4. 이론적 증명
명제1 : optimal D는 G가 고정되어있을 때, 로 수렴한다.
- GAN 모델의 목적함수인
는 다음과 같이 변환될 수 있습니다.

연속 변수의 기대값
- 목적함수는 D의 관점에서 최대의 값을 가져야하며, D의 Optimal은 마지막으로 변환된 식의 극대값을 가지게 됩니다.
- 마지막으로 변환된 목적함수의 식은 의 형태이며 이 형태의 식의 극대값은 를 가지게 됩니다. 따라서 Optimal D는 의 값을 가지게 됩니다.
명제2 : Global optimum은
- 명제는 두 데이터 분포의 차이와 관련되어 있으며, 두 데이터 분포의 차이를 나타내는 것에는 KL Divergence와 JSD 등이 있습니다. GAN 모델에서는 JSD를 이용하여 명제를 증명합니다.
Entropy
- 정보 이론에서 정보량, 무질성의 정도를 나타냅니다.
- Entropy는 (N : Class 개수, :발생확률)로 표현되며 entropy의 값이 0에 가까울수록 정보량이 작음을 의미합니다.
예를 들어 모든 경우의 발생 확률이 같은 경우, 즉 불확실성이 큰 경우는 Entropy의 값이 커지며 이 데이터에서 얻을 수 있는 정보량이 큼을 의미합니다.
Cross Entropy
- ML/DL에서 알고 있는 실제 데이터의 분포 P와 예측 모델을 통해 구한 데이터의 분포 Q를 이용하여 Entropy를 구하고, 이를 통해 예측 모델이 실제 데이터의 분포와 유사해지도록 학습하는 과정에 사용됩니다.
- Cross Entropy는 로 표현됩니다.
KL Divergence
- 서로 다른 두 분포의 차이를 측정하는데 사용됩니다.
- 의 식을 통해 두 분포의 차이를 구하게 됩니다.
- 식을 로 변환할 수 있으며 두 데이터 분포의 정보량, 즉 H(P, Q)는 로 표현할 수 있습니다.
JSD(Jenson-Shanon divergence)
- M을 확률 분포 P, Q의 평균이라고 할 때, JSD는 다음과 같이 표현할 수 있습니다.
- M이 P와 Q의 평균값이므로 KL Divergence와는 다르게 대칭적이고, 거리의 개념을 적용할 수 있습니다.
- D의 관점에서 V의 값을 최대로 만드는 함수를 새로이 C(G)로 정의한다면, 명제 1의 결론을 적용하여 다음과 같이 식을 표현할 수 있습니다.
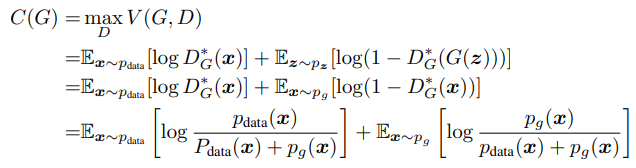
- GAN 모델에서는 명제를 증명하기 위하여 JSD를 사용합니다. JSD를 적용한 수식의 편의를 위하여 각각의 식에 log2를 더하고 다시 2log2(=log4)를 빼는 과정을 거쳐 다음과 같은 식을 얻습니다.
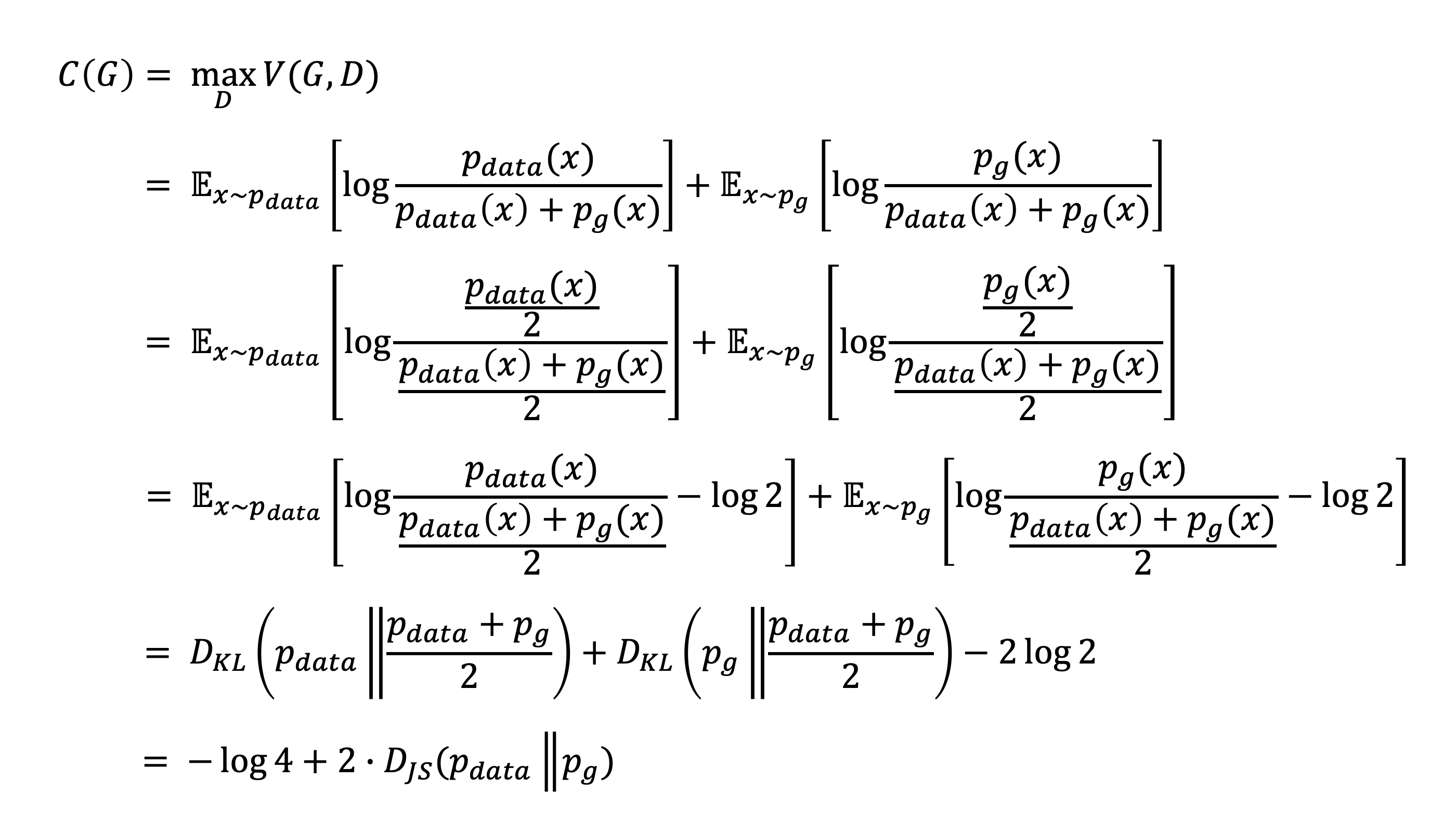
- 중간 과정을 제외하면 의 식을 얻을 수 있습니다. C(G)는 목적함수를 새롭게 정의한 함수이며 G의 관점에서 목적함수를 작게 만드는 과정이 남아있습니다.
- 위에서 언급한 바대로, JSD는 거리의 개념을 적용할 수 있기에 는 0을 최소값으로 가질 수 있습니다. 0을 최소값으로 가지게 되면 G와 D의 관점에서 Global optimum을 가지게 됩니다.
- 따라서 가 0이 되는 지점, 일 때 GAN모델은 Global optimum을 가지게 됩니다.

KHU, SWCON