엔지니어는 종종 실세계 구성요소와 시스템을 모델링하고 시뮬레이션하여 동작을 예측합니다
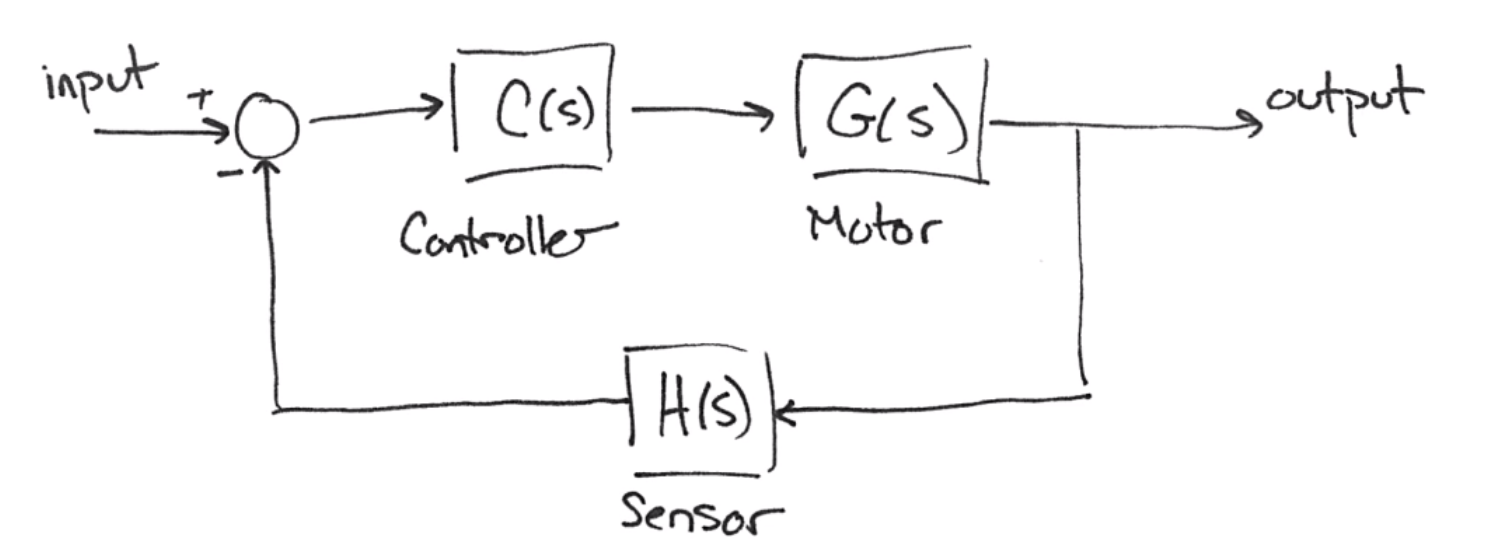
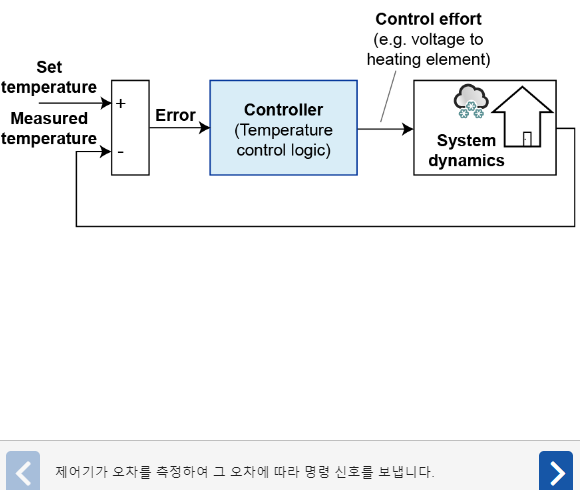
일반적으로 블록을 사용하여 시스템의 구성요소, 구성요소 내의 수학 연산, 구성요소 간의 관계를 시각적으로 표현합니다
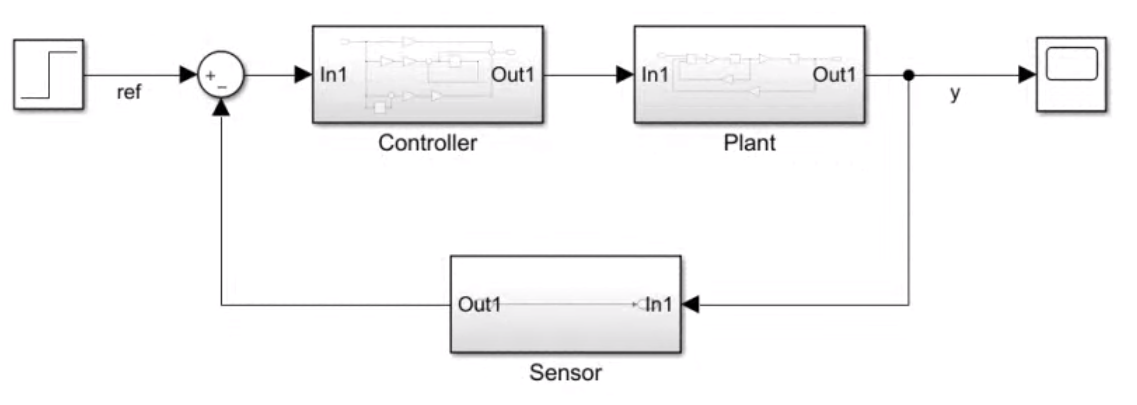
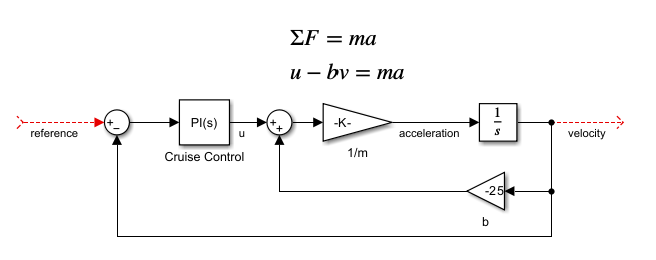
위의 블록 다이어그램을 시뮬링크로 만들 수 있다
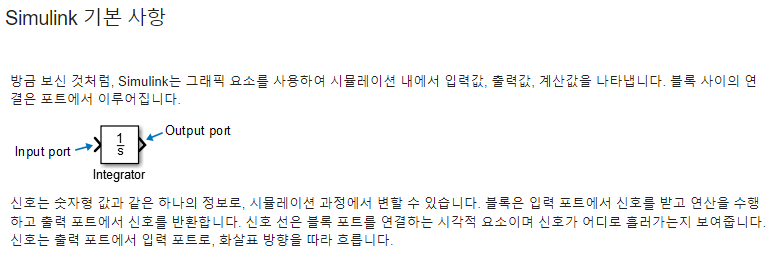
Simulink
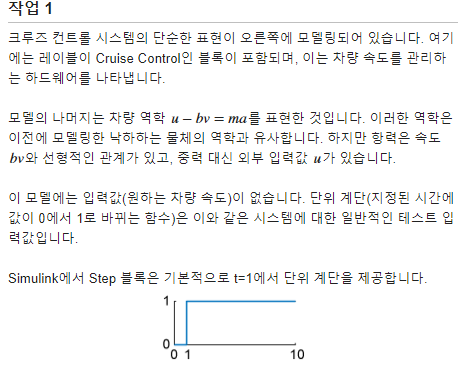
크루즈 컨트롤 시스템
신호 검사하기
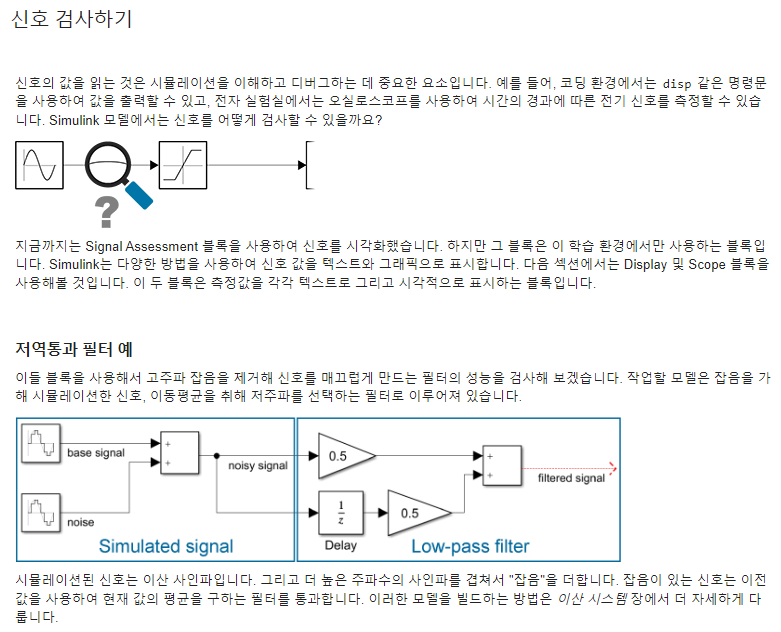
시뮬링크로 LPF 모델링해서 만들 수 있다
Scope 활용하기
Compare to zero 블록, Gain 블록 사용하고, 그 출력 값 Scope로 확인 가능
Simulink에서 조건문
Switch 블록 사용하면 된다
프로젝트 자동차-성능패키지
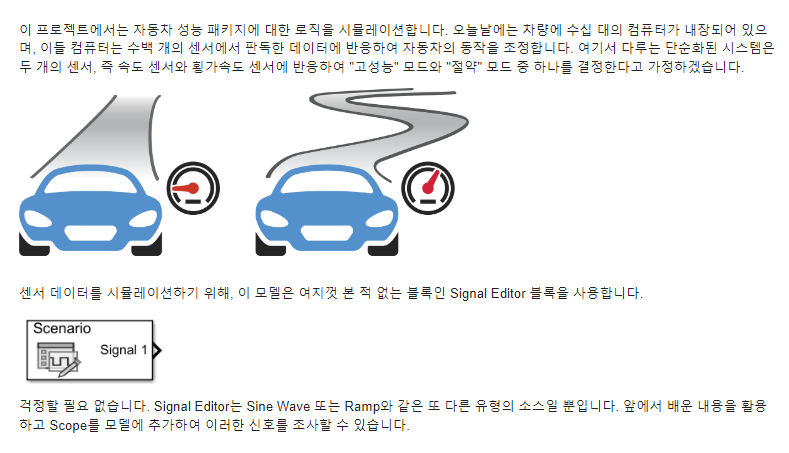
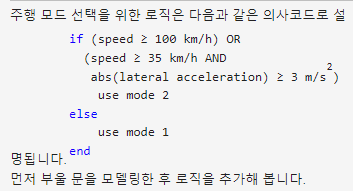
속도센서와 횡가속도 센서에 반응하여, 고성능 모드와 절약 모드를 결정한다
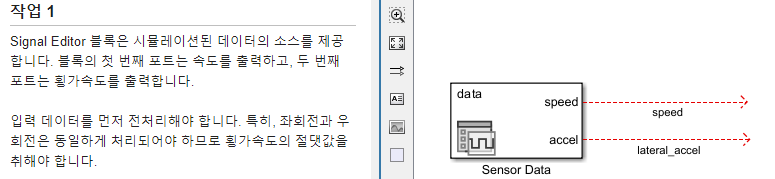
- 입력 데이터인 Speed, 횡가속도를 쓴다 -> 좌회전 우회전 동일하게 처리해야해서 횡가속도는 절댓값 취했음
- 속도가 100km/h보다 크거나, 35km/h보다 크고, 횡가속도의 절댓값이 (3m/s)^2클때 모드 2 사용, 그외는 모드 1
Matlab 작업공간 변수

시뮬링크에서, matlab 작업공간에 정의해둔 변수 쓸 수 있다
Matlab Function Block
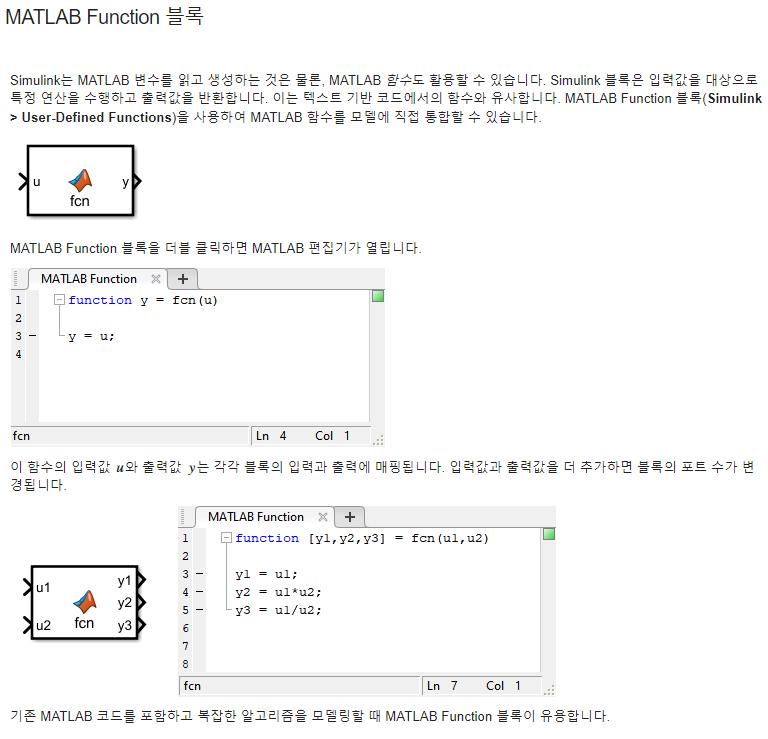
복잡한 방정식을 Matlab Function 블록 내부에 Matlab언어로 코딩하고, Input, OutPut 만들어서, 블록으로 쓸 수 있다
Simulink - 동적 시스템
동적 시스템은 상태를 가지며, 상태의 값은 시간에 따라 변합니다
어떤 시점의 상태는 그 이전 시간의 상태와 시스템의 특성에 따라 정해진다
상태를 좌우하는 요소
- 초기조건
- 시스템 물리적 특성
- 외부의 압력
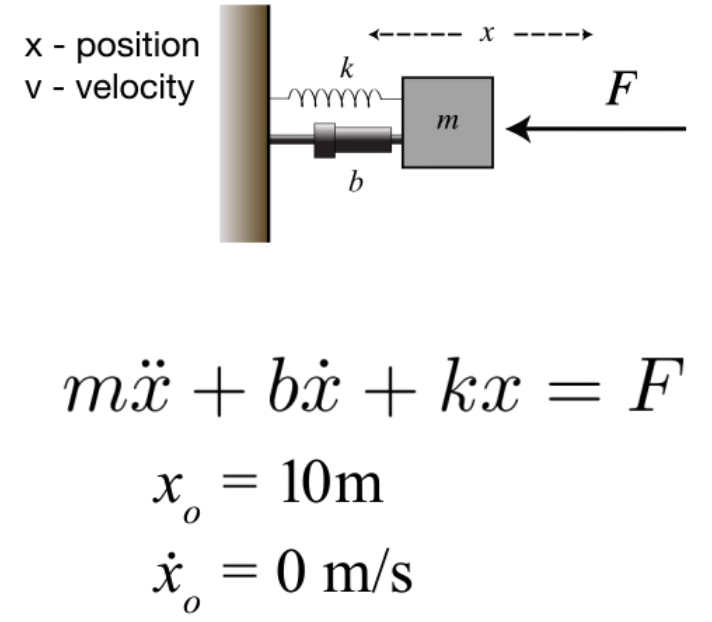
이 상태에 따라 시스템 추력이 결정 된다
동적 시스템 - 이산시스템, 연속시스템
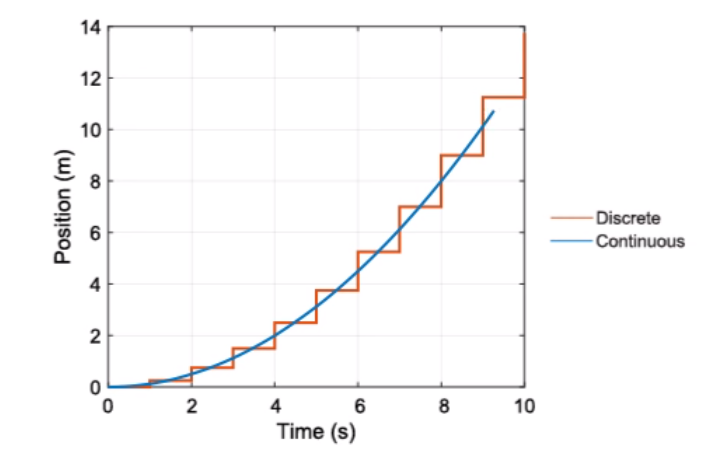
- 이산 시스템
특정 시점의 시스템의 상태를 모니터링
동특성은 차분 방정식으로 기술
- 연속 시스템
샘플 간 시간이 0에 가까워짐
연속 동적 시스템은 미분방정식으로 기술 됨
상태 자체보다는 상태의 도함수를 추적하며, 각 시간 스탭에서 적분을 계산한다
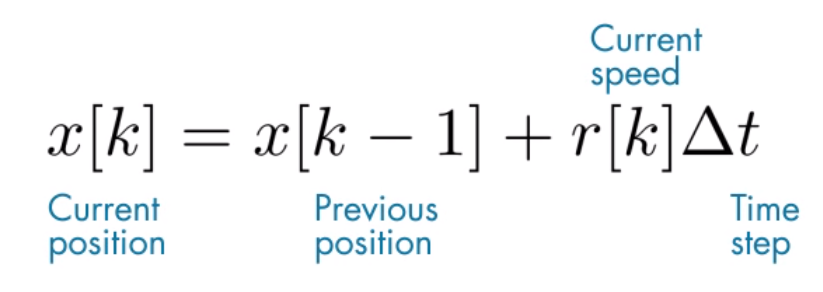
이산 시스템 실습
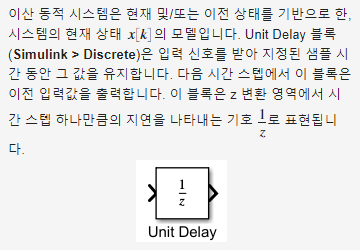
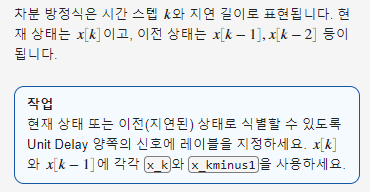
Unit Delay로 차분 방정식의 x[k], x[k-1] 을 구현할 수 있다
Unit Delay 블록의 초기조건 정해줘야한다
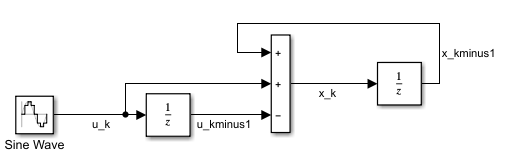
이런식으로 차분 연립방정식 모델링 가능
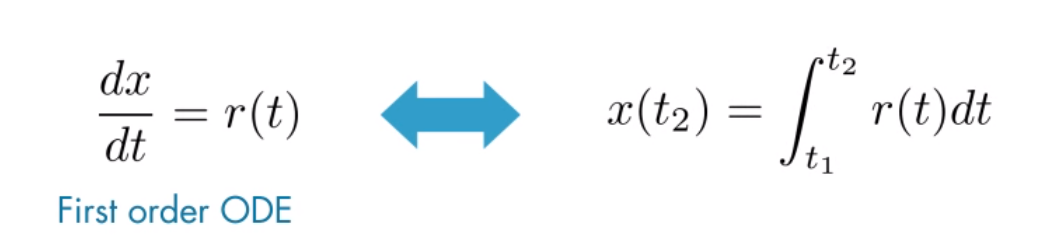
연속 시스템
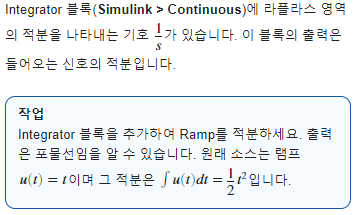
라플라스 영역의 적분 나타내는, Integrator 블록으로 연속 시스템 만들 수 있다
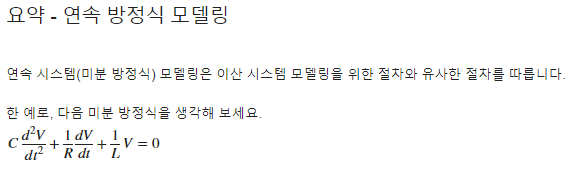
이런식으로 미분 방정식, Integrator 사용해서 만들 수 있다.
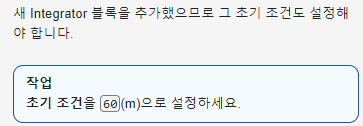
이 역시 Integrator 초기 조건 정해 줘야한다.

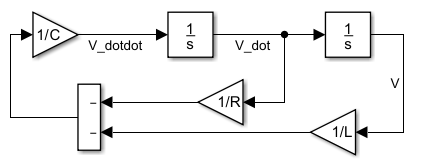
시뮬레이션 시간과 스텝 크기
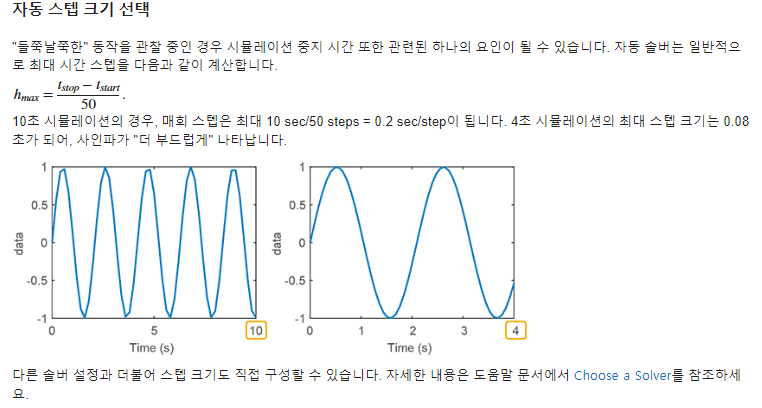

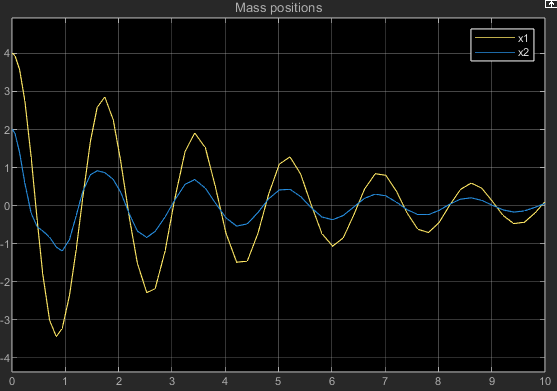

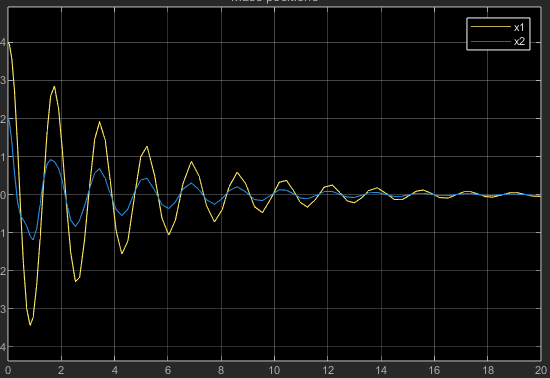
- 중지시간 길게해서 동특성 더 살펴볼 수 있다
프로젝트 - 온도 조절 장치 모델
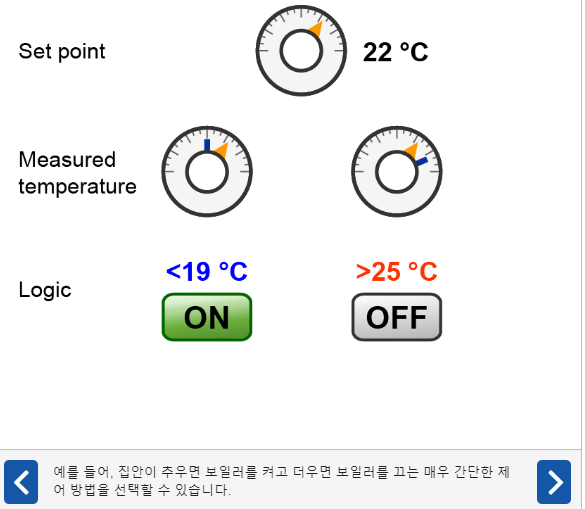
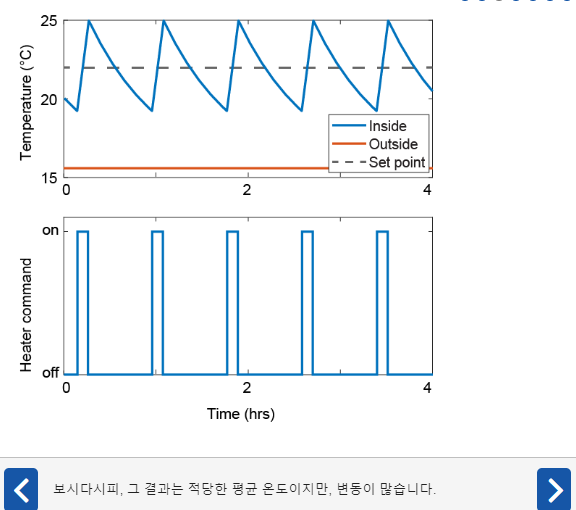
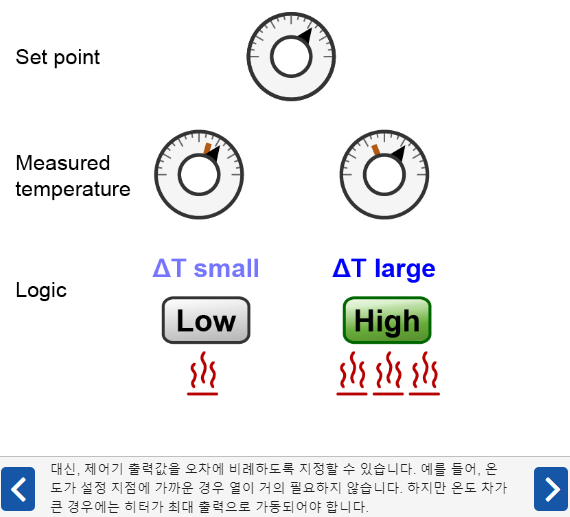
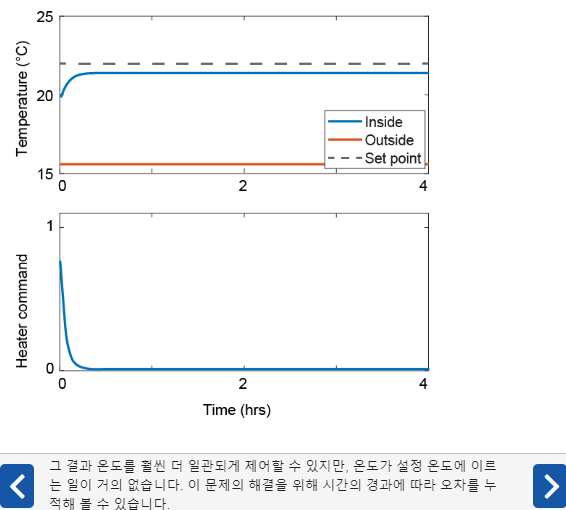
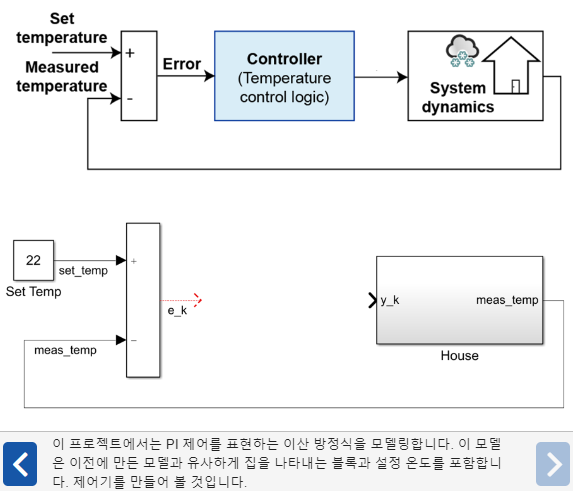
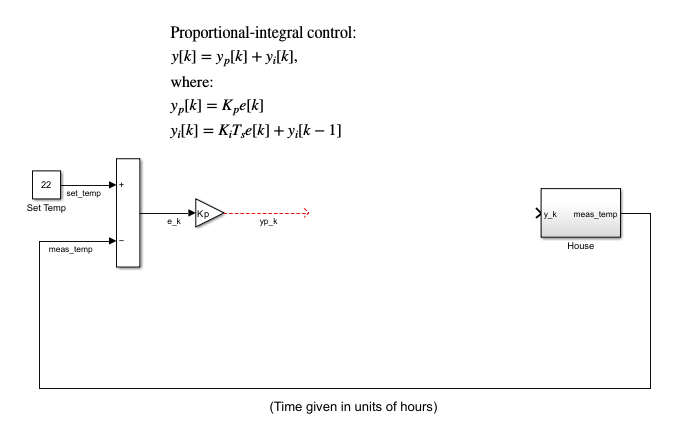
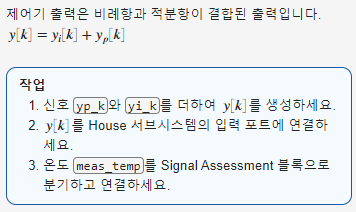
Simulink로 이산 비례-적분(PI) 제어기를 모델링 할 수 있다
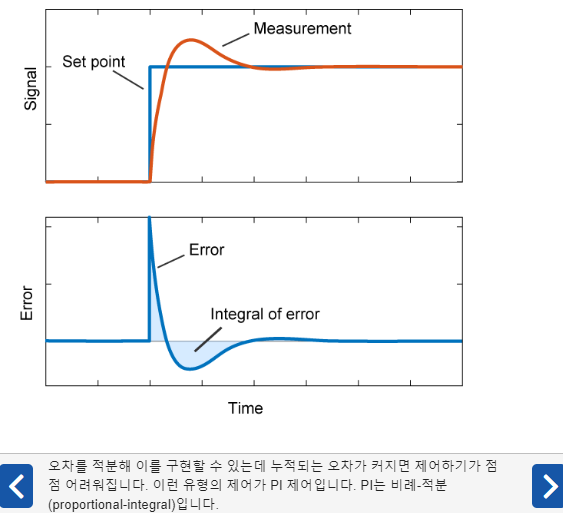
에러에 비례하는 비례항과, 에러와, 과거 상태를 보고 적분하는 적분항을 모델링 한뒤, 둘을 합쳐서 이산 비례-적분 제어기를 만들었다
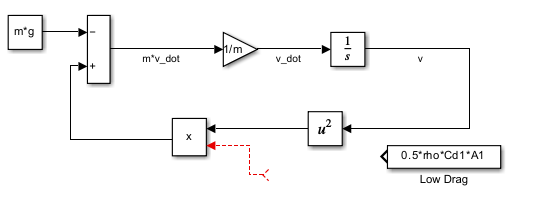
프로젝트 송골매의 급 강하

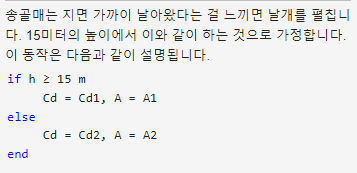
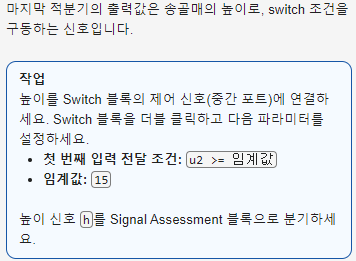
지면에 가까워졌을 때 항력계수와, 넓이를 바꾸는 것을 Switch 문으로 적용

조건이 높이라는 상태지만, 기존에 만든 방정식의 상태가 속도와 가속도 밖에 없다.
속도와, 높이를 바꾸면서 scope 급강하 어떻게하는지 보자
마무리

