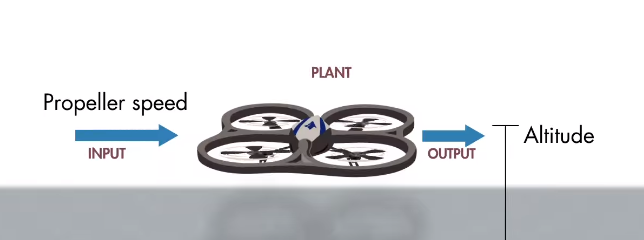
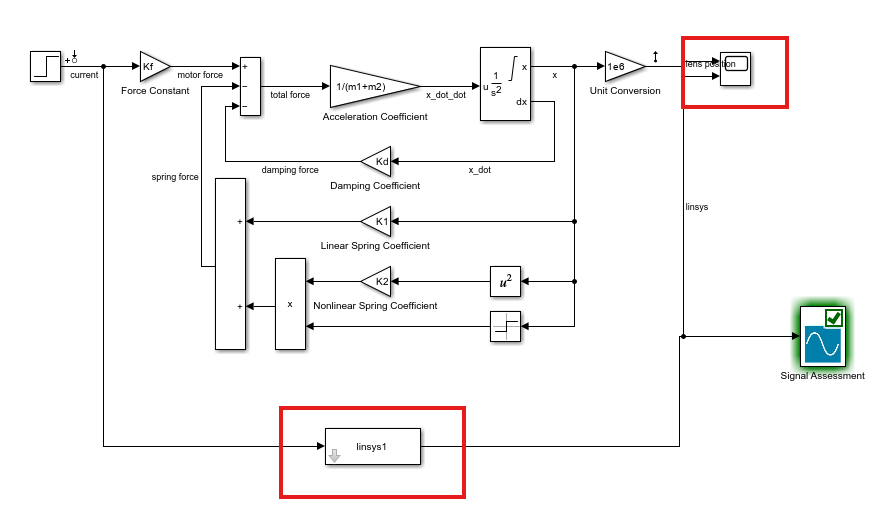
전류-렌즈 위치 시스템
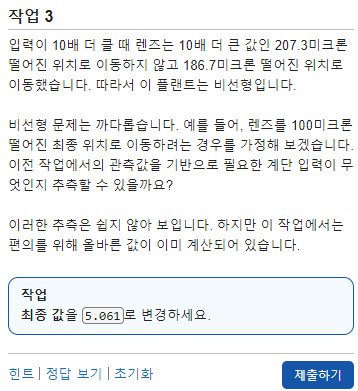
비선형 시스템, 1000미크로 이상 못 옮김
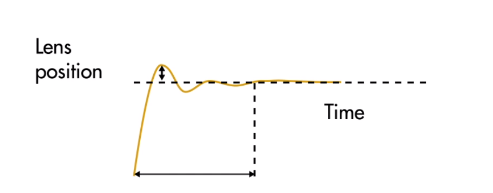
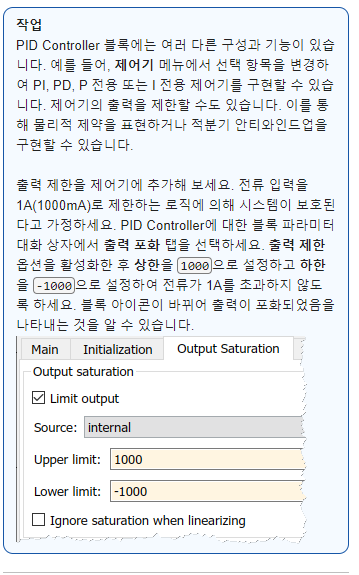
oveshoot과 shattling time을 개선하기 위해 제어기 설계 필요
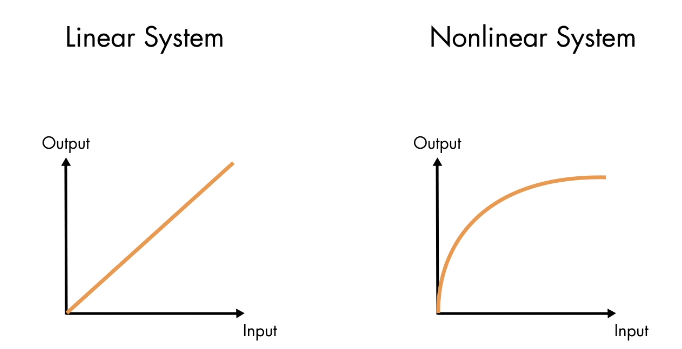
대부분 nonlinear system이지만 선형화 가능 -> LTI 시스템 분석 가능
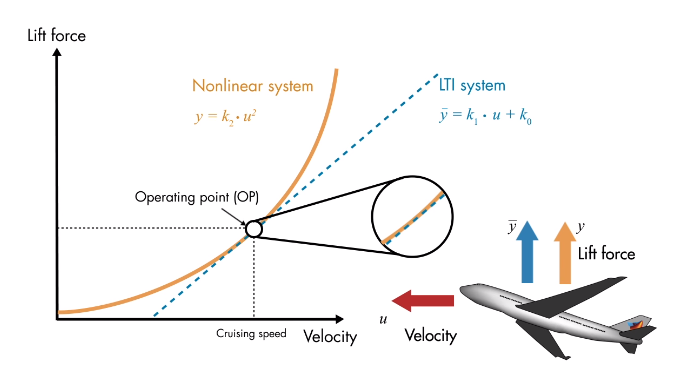
crusing speed 지역에서 꽤 선형적이다 -> Operationg point
플랜트를 선형화해서 동작점 근처에서 선형화해서 LTI 시스템 구할 수 있다
(model linearizer로 선형화함)
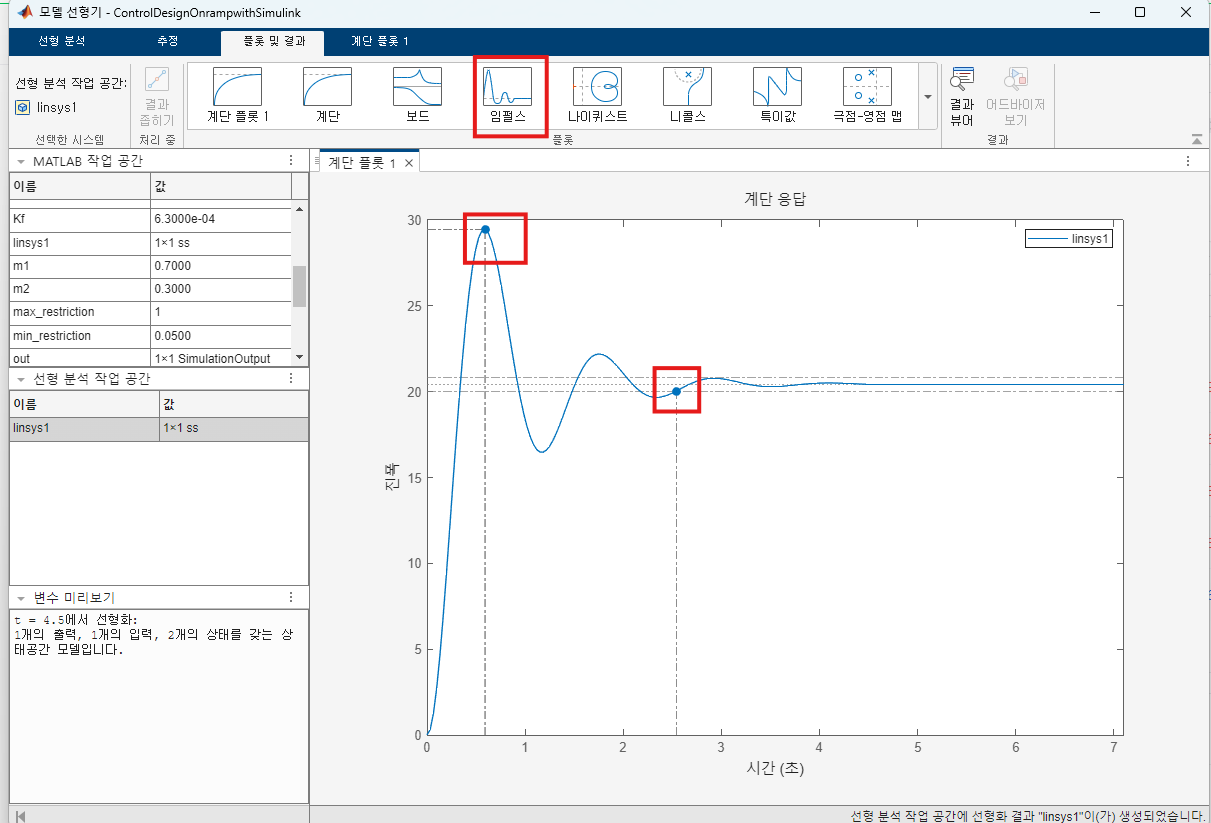
model linearizer로 한것(동작점 4.5초)
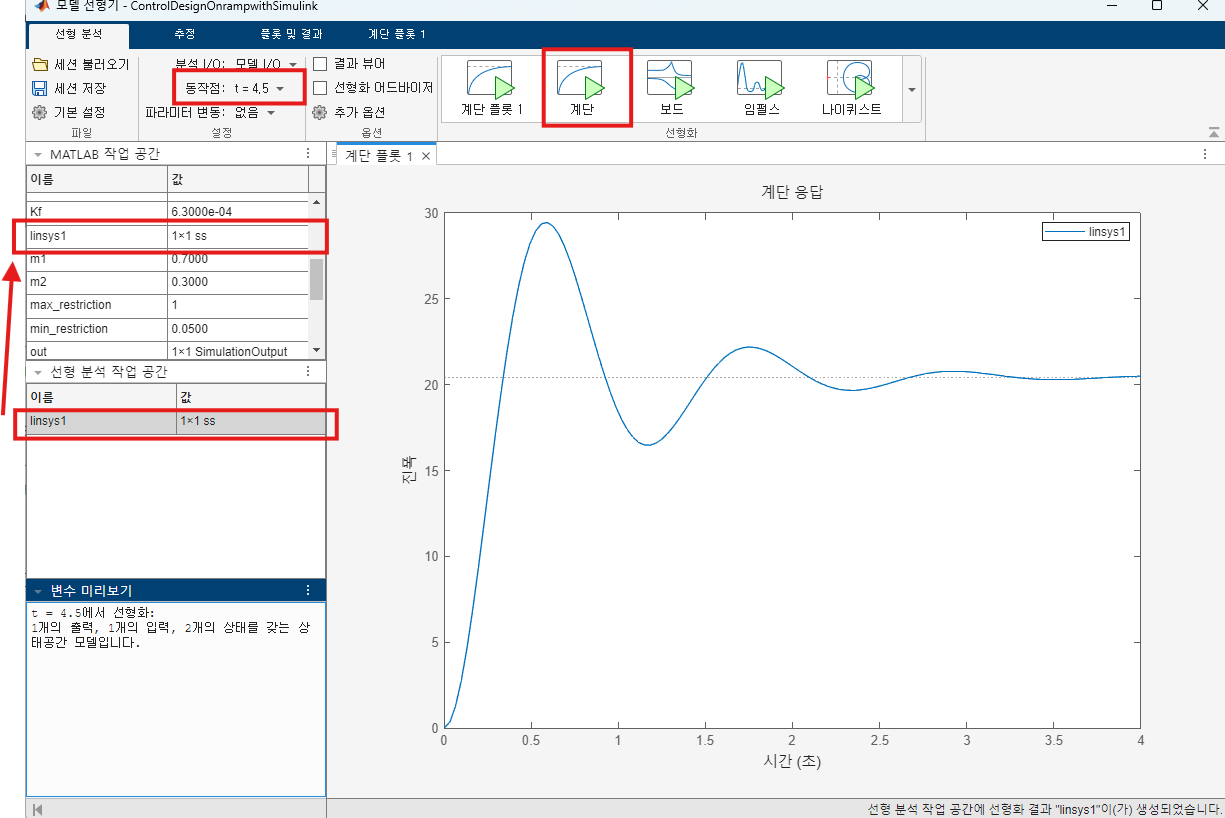
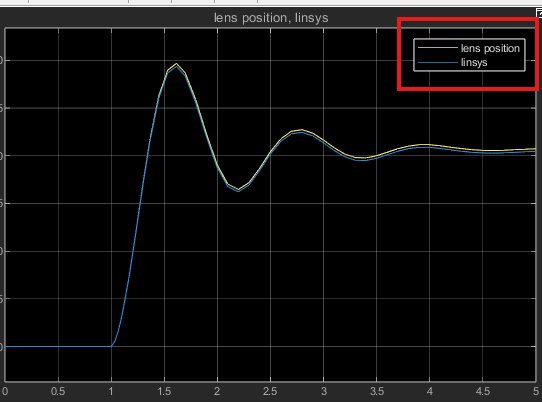
실제 시스템과, LTI 시스템이 유사함
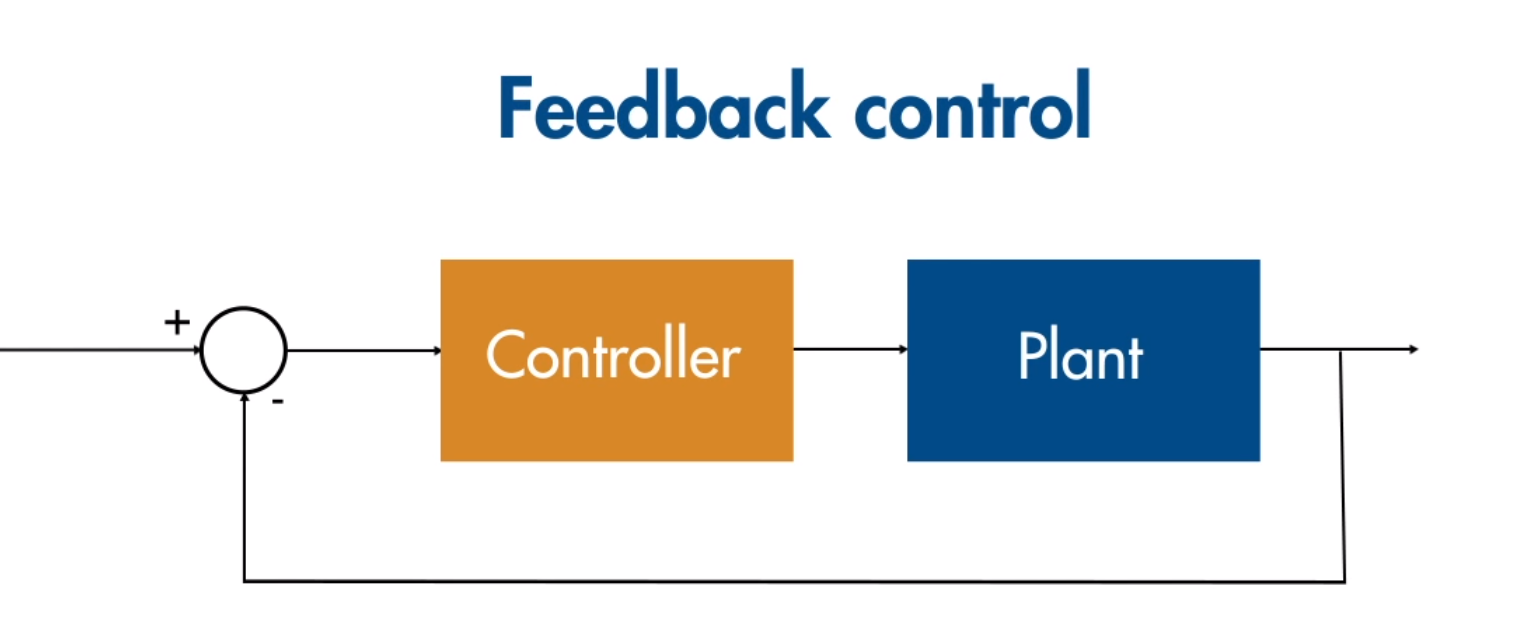
open loop control, feedback control
입력을 수정하면서 시스템에서 원하는 출력을 얻게 하는 컨트롤
이 인풋을 찾기 위해, 피드백 제어를 한다
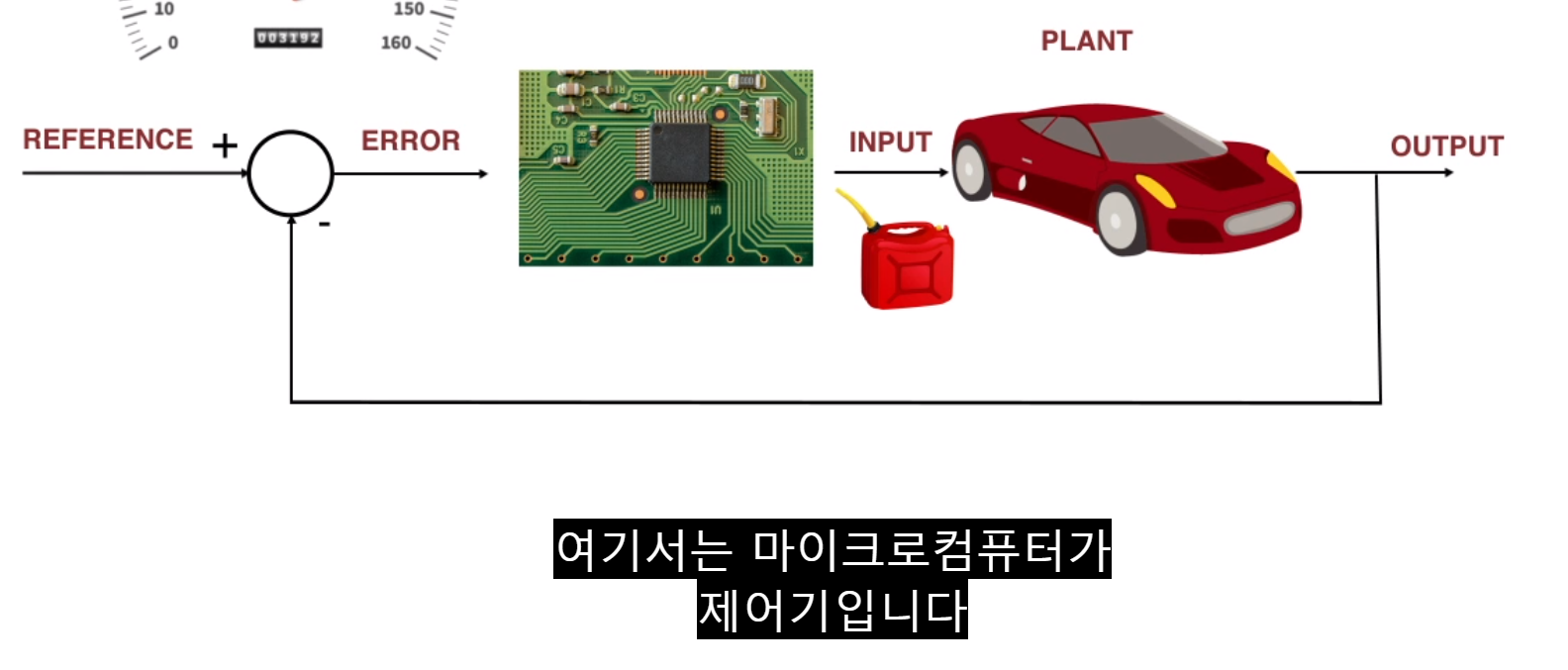
크루즈 컨트롤 시스템
엔진으로 유입되는 연료양 조절해서 속도 조절 -> 엑셀로 조정
크루즈는 이걸 자동으로 함, 자동차 속도가 출력, 엔진으로 유입되는 연료 양이 인풋
그 사이가 플랜트
크루즈 컨트로를은 속도를 설정된 지점으로 유지하는 것
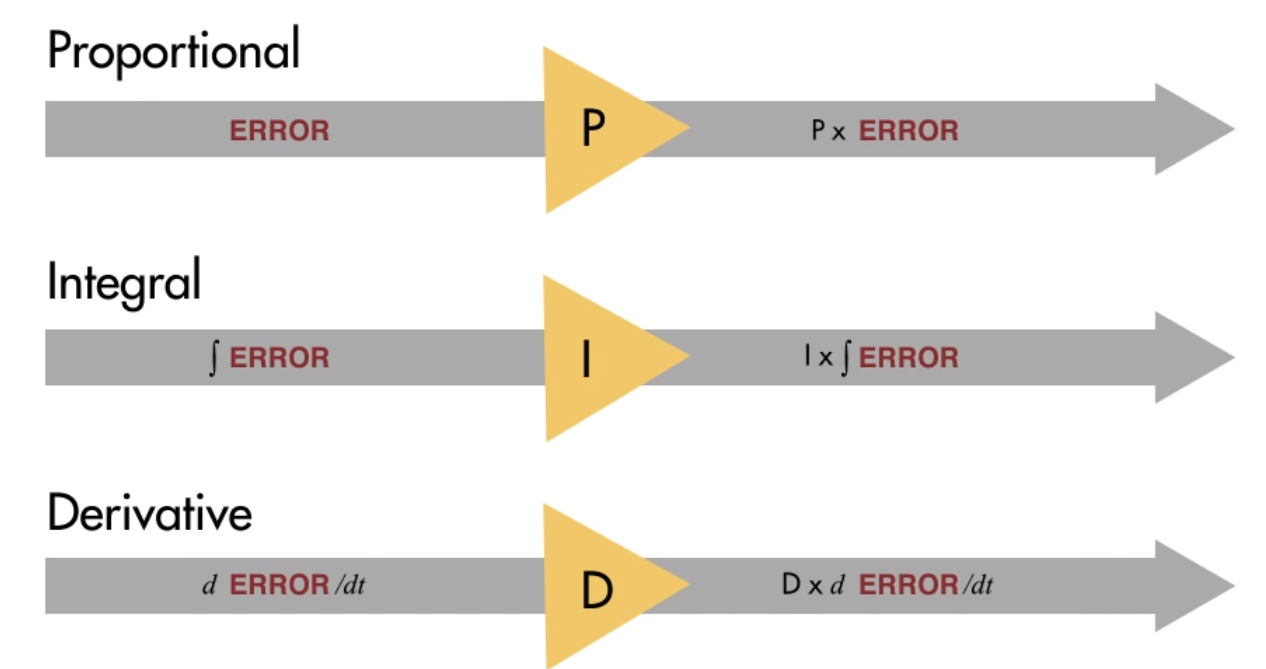
P게인은 에러에 비례 ( 에러의 양 많으면 할 일 많음 )
I게인은 에러의 누적과 비례 ( 누적 값 많으면 할 일 많음 )
D게인은 에러의 변화와 비례 ( 급하게 변화하면 할 일 많음 )
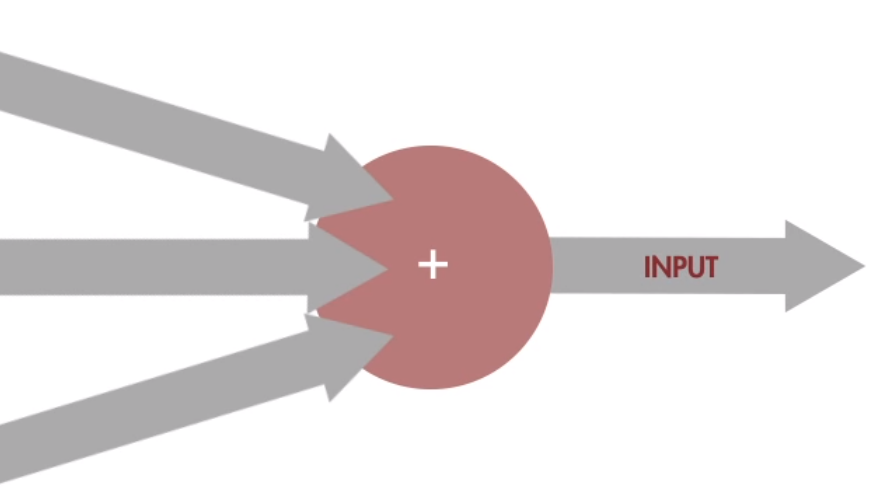
다 모아서 플랜트 인풋으로 넣음
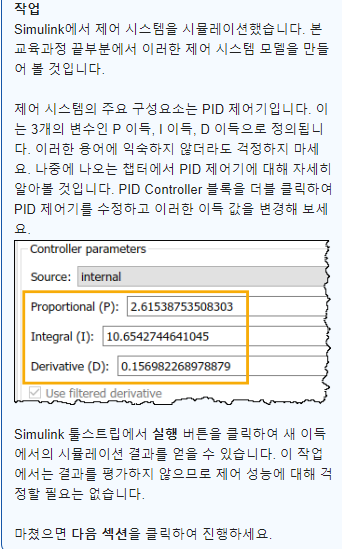
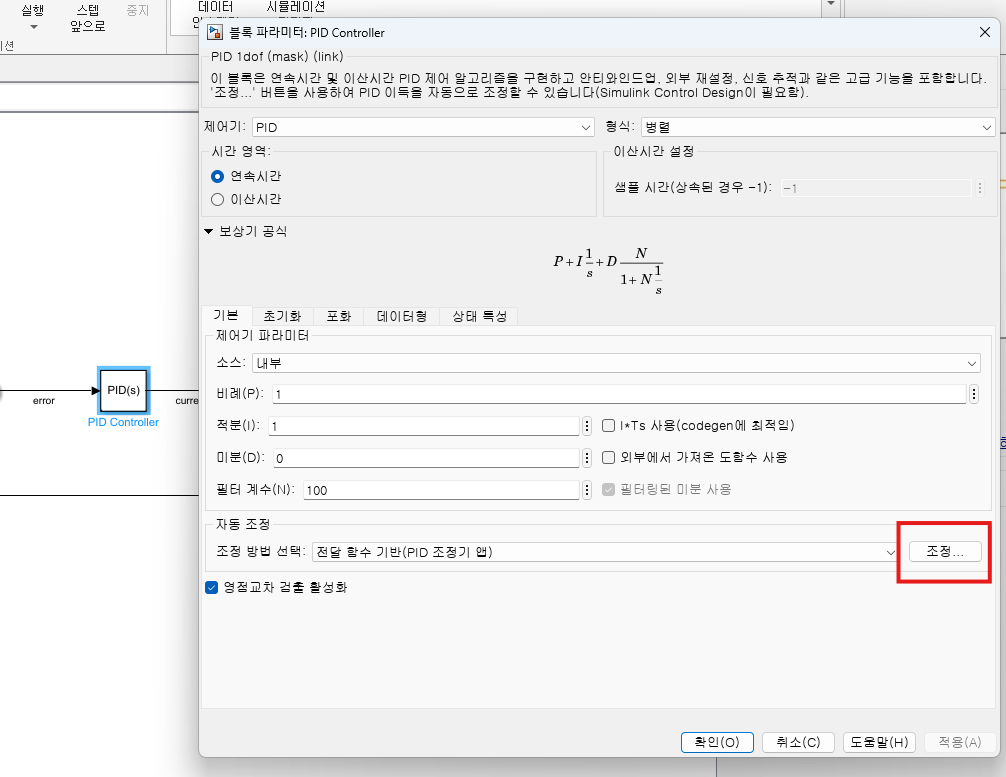
PID를 설정하는게, 제어기를 조정한다고 한다
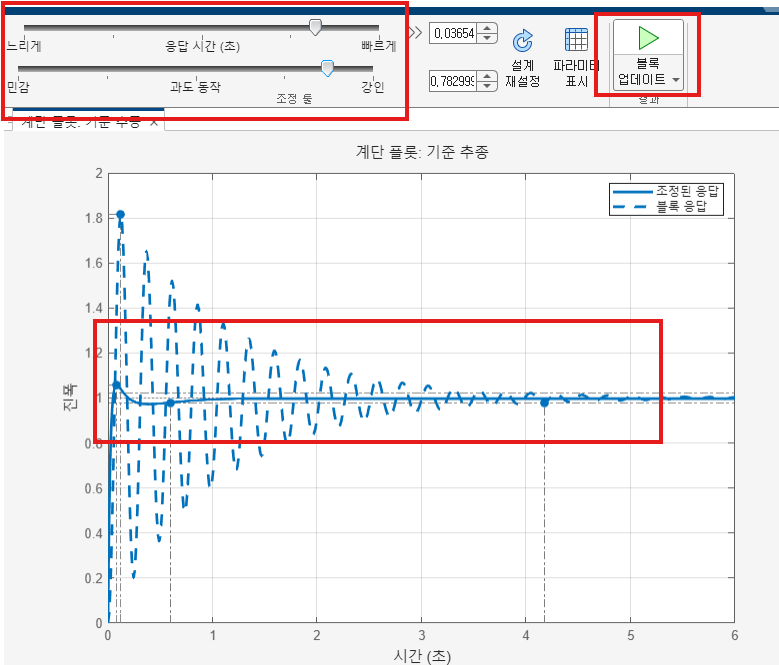
PID 조정앱을 활용해서 PID 조정 가능 (PID Tuner의 Response Time이랑 Transient Behavior로 조정 가능)
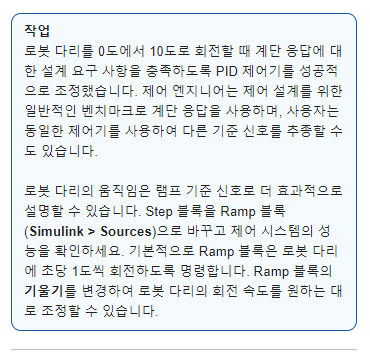
로봇 다리 모델링 제어
정리