3D Rotation About Arbitrary Axis
임의의 축을 중심으로 3차원 공간에서 물체를 회전시키는 방법은 다음과 같다.
회전축이 좌표축 (x,y,z) 과 정렬되지 않은 경우, 이를 구현하기 위해서는 좌표계를 회전축과 정렬시키고 나서 회전한 후, 다시 원래 좌표계로 복원하는 과정이 필요하다.
1. 임의 축 정의
임의의 축을 벡터 u=(ux,uy,uz)로 정의한다. 이 벡터는 회전축으로 u 벡터를 중심으로 물체를 회전 시킬 것이다.
2. 회전 변환 과정
임의의 축 u 를 기준으로 회전시키기 위해서는 좌표계를 변환한 후 회전하는 방법을 사용한다. 회전 과정은 아래와 같이 3단계로 이루어진다.
- 좌표계 정렬
회전축이 z축(혹은 x,y축)에 평행하도록 좌표계를 변환(회전) 한다.
- 회전 적용
z축을 기준으로 회전 행렬을 사용하여 물체를 회전 시킨다.
- 좌표계 복원
처음에 정렬했던 좌표계를 다시 원래 상태로 되돌린다.
u=(x,y,z)
Rotate u onto the z-axis
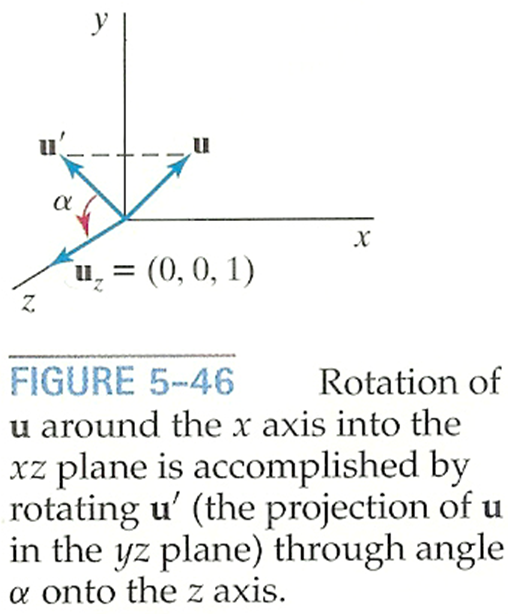
- u′: Project u onto yz-plane to compute angle α
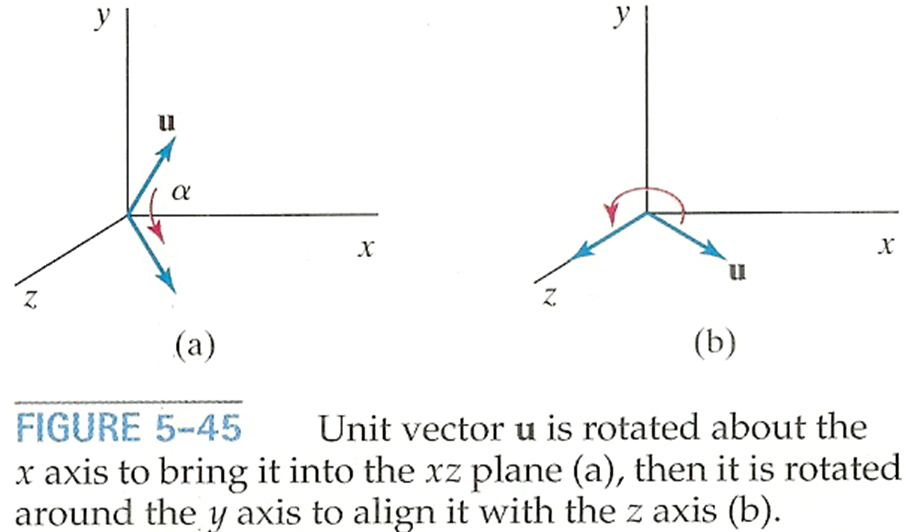
- u′′: Rotate u about the x-axis by angle α
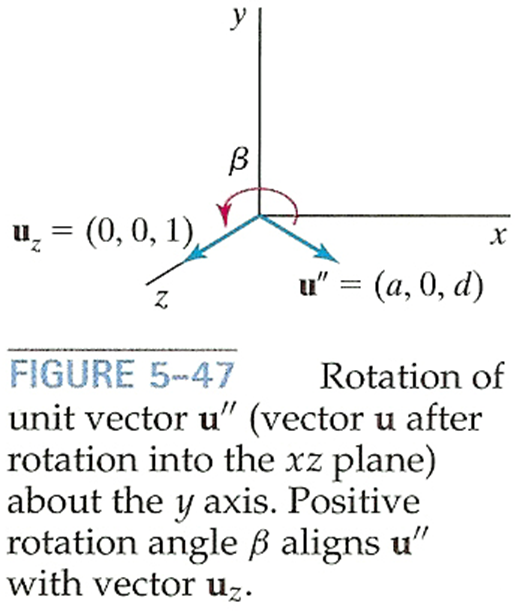
- Rotate u′′ onto the z-axis
Example
임의의 축 u 벡터가 다음과 같이 있다고 하자.
u=(a,b,c)
u 벡터를 yz 평면에 사영한 u′ 벡터는 다음과 같다.
u′=(0,b,c)
그리고 최종적으로 만들 z 축 벡터 uz 는 다음과 같이 정의된다.
uz=(0,0,1)
우리는 u′ 에 회전 행렬을 적용하여 uz 벡터로 만들 것이다. 이를 위한 회전 행렬(x-rotation)은 다음과 같이 정의된다.
⎝⎜⎜⎜⎛10000cosαsinα00−sinαcosα00001⎠⎟⎟⎟⎞
여기서 cosα와 sinα는 각각 dot product 와 cross product를 이용해 구할 수 있다.
cosα=∣∣u′∣∣∣∣uz∣∣u′⋅uz=b2+c2c
u′×uz=ux∣∣u′∣∣∣∣uz∣∣sinα=ux⋅b
sinα=∣∣u′∣∣∣∣uz∣∣b=b2+c2b
이를 정리한 회전 행렬 Rx(α) 는 다음과 같다.
Rx(α)=⎝⎜⎜⎜⎛10000b2+c2cb2+c2−b00b2+c2−bb2+c2c00001⎠⎟⎟⎟⎞
혹은 각도 α 를 다음과 같이 계산하여 구할 수 있다.
α=atan2(b2+c2c,b2+c2b) 