Eular Angle
Eular Angle (오일러 각)은 3차원 공간에서 물체의 회전 방향을 표현하는 방법 중 하나이다. 오일러 각은 물체가 각각의 좌표 축()에 대해 순차적으로 회전하는 각도를 의미하며, 회전을 표현하기 위해 3개의 각도가 사용된다. 이를 통해 물체의 방향을 이해하거나 제어할 수 있다.
구성
Eular Angle 은 세 개의 축을 중심으로 한 회전으로 설명되며, 각 축에 대한 회전 각도를 차례로 적용한다.
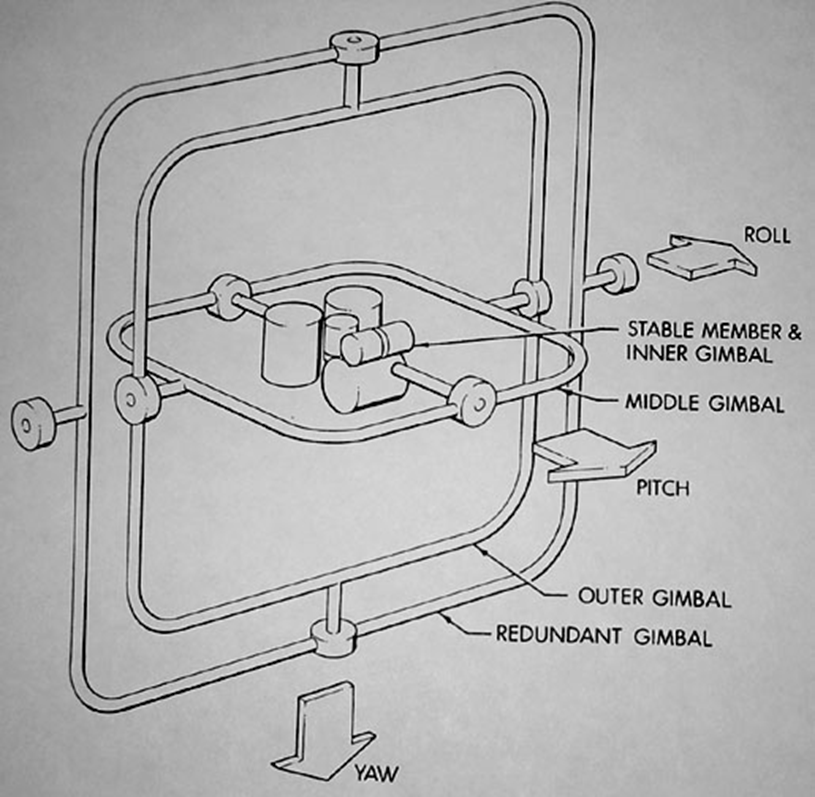
- Pitch
x축을 기준으로 하는 회전으로 물체를 위아래로 기울이는 동작과 같다. - Yaw
y축을 기준으로 하는 회전으로 물체를 좌우로 회전시키는 동작과 같다. - Roll
z축을 기준으로 하는 회전으로 물체를 좌우로 비트는 동작과 같다.
Eular Angle은 다음의 12개의 조합으로 표현할 수 있다. 일반적으로는 XYZ 혹은 ZYX를 많이 사용한다.
- XYZ, XYX, XZY, XZX
- YZX, YZY, YXZ, YXY
- ZXY, ZXZ, ZYX, ZYZ
XYZ 의 조합으로 나타낸 Eular Angle은 다음의 행렬 로 나타낼 수 있다.
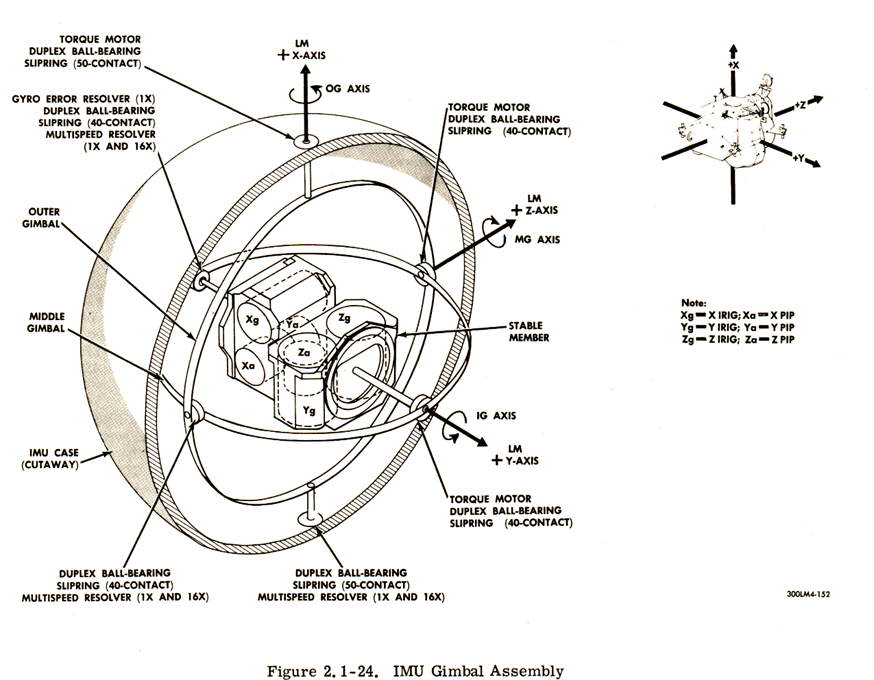
Example: Gimbal

장점
Eular Angle은 물체의 회전 방향을 각 축에 대해 명확하게 설명할 수 있기 때문에 직관적이다. 또한 각 축에 대한 회전 변환을 행렬로 표현하기 쉽다.
단점
Eular Angle은 한 각을 표현할 때 여러 행렬로 동시에 표현 가능하기 때문에 굉장히 모호하다. 이로 인해 물체의 부드러운 움직임을 표현하는데 매우 제한적이다. 이 문제를 해결하기 Eular Angle로 해결하기 위해서는 회전 행렬의 순서를 조합하여 표현하는 방법이 있을 수 있다. 그러나 이 방법은 각 프레임마다 회전 행렬을 구하고 행렬의 곱을 계산해야 하기 때문에 비효율적이다.
또한 Eular Angle은 Gimbal Lock 현상이 발생한다.
Gimbal Lock (짐벌 락)
Gimbal Lock은 회전 축 중 하나가 다른 축과 정렬될 때 발생하는 현상으로, 회전 축이 두 개로 줄어들어 더 이상 원하는 방향으로 회전할 수 없게 되는 문제(회전 자유도가 줄어드는 현상)이다. 예를 들어, pitch 축을 90도로 회전 시키면 yaw와 roll축이 서로 겹치게 되어 자유롭게 회전할 수 없게 된다.
이로 인해 특정 각도에서 회전이 제한되고, 원하는 회전 방향으로 객체를 제어할 수 없게 된다.
이러한 문제를 해결하기 위해 Quaternions 을 사용할 수 있다.
