✈️ L1 Nonlinear Guidance Logic로 보는 Trajectory Tracking 완전 정리
본 글은 MIT LIDS에서 제안한 비선형 유도(Guidance) 로직을 기반으로
Trajectory Tracking(궤적 추종) 문제를 “왜 기존 PD가 곡선에서 약한지 → 왜 L1이 강한지”의 흐름으로 정리한다.
원문: A New Nonlinear Guidance Logic for Trajectory Tracking (Park, Deyst, How). fileciteturn0file0L1-L22
⚠️ Velog 수식 렌더링 깨짐 방지: 본 문서는 모든 수식을
$$ ... $$로 통일했다.
(Velog에서\[\]또는\\[같은 형태가 깨지는 경우가 있어 안전하게 처리)
0) 이 글에서 다루는 것
- Trajectory Tracking에서 흔히 쓰는 Outer-loop guidance 관점
- Park/Deyst/How 논문이 제안한 L1 Guidance Logic:
- 직선에서는 PD처럼 동작
- 곡선에서는 anticipation(선행) 성질로 타이트 추종
- 풍속(바람)으로 인한 속도 변화에 자동 적응 fileciteturn0file0L34-L45
- 선형화 분석(직선/비직선/원 궤적), 시뮬레이션 비교, 비행시험, Lyapunov 안정성(부록)
1) 문제 배경: Trajectory Tracking의 두 가지 설계 철학
논문은 trajectory tracking을 크게 두 방식으로 나눈다. fileciteturn0file0L34-L41
1.1 분리 설계(Outer guidance + Inner control)
- Outer loop(유도): 경로 오차로부터 가속도/뱅크각 명령 생성
- Inner loop(제어): 가속도/뱅크각 명령을 실제 동역학으로 따라가게 만듦
- 실제 항공/로봇 시스템에서는 이 방식이 흔함(단순·검증 용이) fileciteturn0file0L34-L45
1.2 통합 설계(Modern control)
- MPC, differential flatness, NN adaptive control 등 통합 설계도 가능하지만 구현/검증/계산비용 이슈 fileciteturn0file0L34-L41
이 논문은 분리 설계를 택하되, outer guidance를 “곡선에서 더 잘” 만들자는 목표다.
2) 기존 Linear PD 방식이 곡선에서 약한 이유
일반적인 outer loop는 cross-track error(횡방향 오차) (d)에 대해 PD를 건다:
직선 경로에서는 꽤 좋지만, 곡선 경로(특히 원 궤적처럼 지속적 곡률)에서는
- 위상 지연(phase lag)로 인해 경로를 “뒤늦게” 따라감
- 특정 상황에서는 정상상태 오차가 생기며, 이를 줄이려면 적분을 추가(PID)해야 하는데
- 적분은 과도응답/초기 추종을 더 나쁘게 만들 수 있음 fileciteturn0file0L237-L264
논문이 보여주는 핵심:
PD/PID는 ‘현재 오차’에만 반응하는 피드백이라 곡선에서 근본 한계가 드러난다.
3) L1 Guidance Logic: “미래 경로를 바라보게” 만드는 기하학적 유도
3.1 정의(Notation)
논문에서 쓰는 핵심 기호는 다음과 같다. fileciteturn0file0L18-L33
- (V): 차량 속도(ground speed를 inertial speed 대용으로 사용) fileciteturn0file0L272-L279
- (L_1): 차량에서 경로를 따라 앞쪽으로 떨어진 reference point까지의 거리
- ( \eta ): 현재 속도 벡터 (V)에서 (L_1) 선분(차량→reference point)까지의 각도(시계방향 +) fileciteturn0file0L18-L23
- (a_{s,cmd}): 속도 방향에 수직(횡방향) 가속도 명령 fileciteturn0file0L18-L23
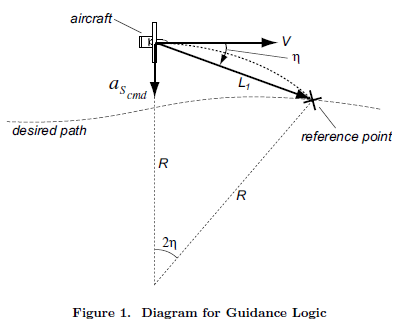
3.2 Reference Point 선택
- desired path 위에서 차량 기준으로 앞쪽 (L_1) 만큼 떨어진 점을 잡는다(look-ahead point). fileciteturn0file0L70-L78
🖼️ Fig1(논문 p2): 차량 위치에서 경로 위 reference point로 향하는 선 (L_1)와 각도 (\eta), 그리고 횡가속도 명령이 표시됨. fileciteturn0file0L70-L88
3.3 Guidance Law(핵심 수식)
횡가속도 명령:
논문 원식 Eq.(1). fileciteturn0file0L79-L88
4) 이 수식이 “기하학적으로” 맞는 이유(순간 원호 추종)
논문은 매우 중요한 해석을 준다. fileciteturn0file0L90-L112
reference point, 차량 위치, 그리고 차량 속도 접선을 만족하는 순간 원호를 생각하면:
따라서 필요한 구심가속도는
즉, L1 guidance는 매 순간
- “지금 이 geometry면 이런 반지름 원을 따라가야 한다”를 만들어내고
- 그 원을 정확히 따라가는 구심가속도를 계산해 준다. fileciteturn0file0L90-L112
👉 직관: 차량은 자신의 속도 방향을 (L_1) 선분 방향으로 정렬하도록 회전한다. fileciteturn0file0L90-L104
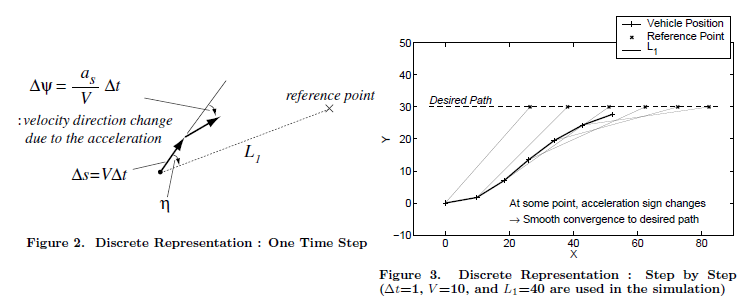
5) Discrete 관점에서 보는 “부드러운 수렴”
논문은 시간 이산화 관점으로, 한 스텝 동안 속도 방향이 어떻게 바뀌는지 도식화한다. fileciteturn0file0L116-L137
- reference point가 속도 방향의 오른쪽에 있으면 (a_{s,cmd})가 오른쪽(시계방향 회전)을 명령
- 결과적으로 속도 방향이 점점 경로 접선에 맞춰짐
🖼️ Fig2, Fig3(논문 p3): 한 타임스텝 변화와 다수 스텝 누적을 보여주며, 어느 지점에서 가속도 부호가 바뀌면서 매끄럽게 경로로 수렴. fileciteturn0file0L116-L147
6) Proportional Navigation(PN)과의 관계
논문은 reference point를 “가상의 타겟”으로 보면 PN과 닮았다고 설명한다. fileciteturn0file0L149-L189
PN의 대표 형태(LOS rate 기반):
L1 guidance는 특정 가정(타겟이 stationary로 보인다고 가정) 아래에서
navigation constant (N_0 = 2)인 PN과 동치 형태가 됨을 보인다. fileciteturn0file0L149-L189
단, 결정적 차이:
- 실제로 reference point는 경로를 따라 이동하는 점
- L1을 고정하면 closing speed가 0에 가깝기 때문에 PN과 완전히 동일한 상황은 아님 fileciteturn0file0L183-L189
7) 선형화 분석: “직선에서는 PD”가 정확히 증명됨
논문은 세 가지 케이스에 대해 분석한다. fileciteturn0file0L191-L207
- Case 1: 직선
- Case 2: 직선에 작은 곡선 섭동(perturbed non-straight)
- Case 3: 원 궤적
7.1 Case 1 — 직선 추종: PD 형태 도출 (Eq.3~Eq.4)
작은 각도에서
여기서 도식(Fig5)에 의해
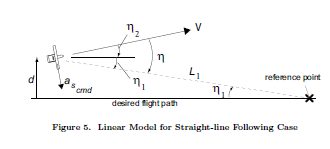
따라서
논문 Eq.(3). fileciteturn0file0L210-L229
✅ 결론
- 자연스럽게 PD 제어기가 된다(횡오차 (d)에 대한 P+D). fileciteturn0file0L210-L229
- (L_1/V)가 사실상 시간상수(대역폭)를 결정
- 더 단순화하면 2차 시스템:
여기서
논문 Eq.(4). fileciteturn0file0L230-L236
👉 L1 선택이 곧 제어 대역폭/응답속도를 고르는 것
8) Case 2 — 곡선(섭동) 경로에서의 핵심: “Reference point 입력” + “위상 선행”
논문 Fig6 상황: 원하는 경로가 nominal 직선에서 약간 휘어졌다고 하자. fileciteturn0file0L244-L256
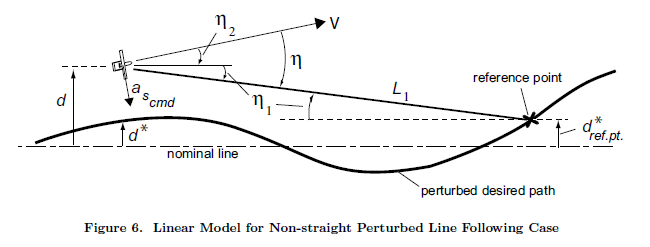
이때 선형화하면(논문 Eq.5):
여기서 입력은 “현재 위치에서의 desired path”가 아니라
앞쪽 reference point의 lateral position (d_{ref.pt}^*)이다. fileciteturn0file0L257-L266
라플라스 변환하면 2차 low-pass transfer:
논문 Eq.(6). fileciteturn0file0L267-L276
8.1 왜 위상(phase)이 좋아지나?
핵심 문장(요약):
- well-damped 2차 시스템은 대역폭 근처에서 약 90° phase lag가 생기는데,
- reference point가 경로에서 앞쪽으로 (L_1)만큼 있기 때문에, 입력 자체가 “미리 움직인” 값이라 phase lead를 제공한다. fileciteturn0file0L276-L300
논문은 이를 시간지연/선행 형태로 근사한다:
따라서(논문 Eq.8):
fileciteturn0file0L301-L317
👉 이 (e^{\tau s})가 “anticipation(선행)”의 수학적 표현이다.
8.2 L1 선택 규칙(고주파 경로 성분 추종)
논문은 경로가 가진 최대 주파수 성분(파장 (L_p)) 기준으로,
정확한 추종을 위해 (L_1)이 너무 크면 안 된다고 말한다. fileciteturn0file0L284-L300
(요지: 높은 곡률/짧은 파장 경로를 따라가려면 L1을 충분히 작게)
9) Case 3 — 원 궤적 추종: “구심가속도 + 안정한 오차 동역학”
원 궤적(Fig8)에서 선형화하면, 결국 횡오차 (d)는 다음과 같은 2차 안정 시스템으로 수렴한다(논문 Eq.17):
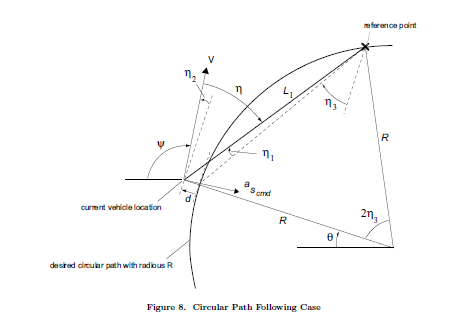
여기서
fileciteturn0file0L332-L369
그리고 정상상태에서 필요한 구심가속도 (V^2/R) 성분이 자연스럽게 포함됨을 보인다. fileciteturn0file0L342-L369
✅ 해석 요약
- L1 guidance는 원 궤적에서 “곡률 feedforward”에 가까운 성질을 자동으로 만든다.
- 따라서 PD/PID보다 원 궤적(곡선)에서 훨씬 타이트하게 붙는다.
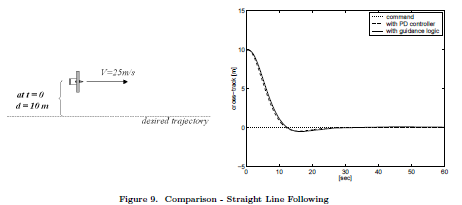
10) 시뮬레이션 비교: PD/PID vs L1 Guidance
논문은 전통 linear 방법과 L1을 비교한다. fileciteturn0file0L371-L385
10.1 비교 1 — 직선
- PD와 L1이 거의 동일 성능 fileciteturn0file0L386-L396
- (직선에서는 L1이 PD로 근사되기 때문)
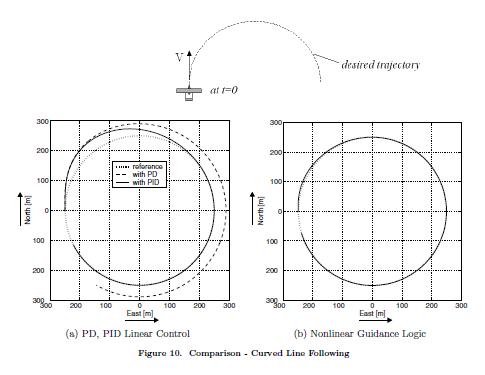
10.2 비교 2 — 곡선
- PD는 원형 경로에서 약 40m 정상상태 오차가 발생하는 사례를 보여줌
- PID는 정상상태 오차는 제거되지만 초기 과도오차가 큼
- L1은 초기 과도에서도 5m 이내로 매우 타이트 fileciteturn0file0L397-L426
10.3 비교 3 — 곡선 + 풍속(steady wind 5m/s)
PD/PID는 바람으로 인한 ground speed 변화 때문에
- 다운윈드에서 바깥으로(속도 증가 → 더 큰 가속도 필요)
- 업윈드에서 안쪽으로(속도 감소) 흔들리는 패턴을 보임 fileciteturn0file0L427-L455
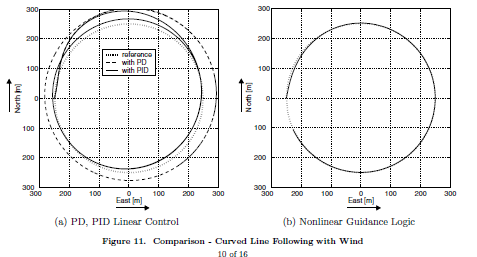
반면 L1은 수식 자체가
이므로 순간 속도 변화가 곧바로 가속도 명령에 반영되어
오차가 7m 이하로 안정적. fileciteturn0file0L272-L279L455-L462
11) 비행시험(Flight Test): 실제 UAV에서 검증
논문은 MIT PCUAV 프로젝트의 2대 UAV에 L1 guidance를 적용한다. fileciteturn0file0L463-L507
11.1 시스템 제약과 L1 선택
- inner loop: bank angle control
- outer loop bandwidth 제한 요인:
- bank control bandwidth (약 2~3 rad/s)
- GPS time delay (0.4s)
- nominal speed (V \approx 25\,m/s)
- 선택: (L_1=150\,m) → crossover 약 0.4 rad/s fileciteturn0file0L463-L470
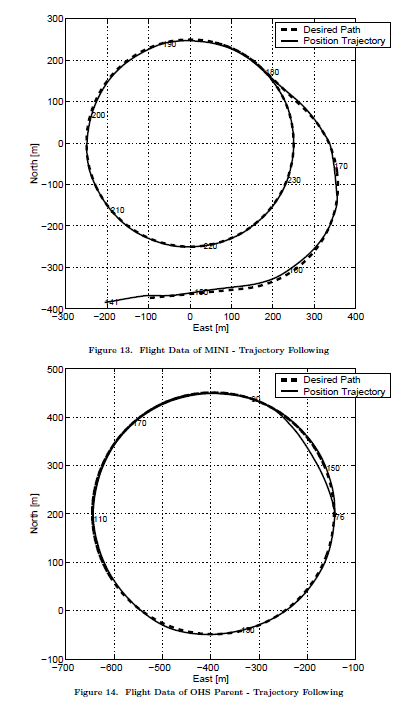
11.2 결과(단독 원 궤적 추종)
- Mini vehicle: 원 궤적에서
- ±2m 이내 75%
- ±3m 이내 96% fileciteturn0file0L487-L495
- OHS Parent: transient 후
- ±2m 이내 78%
- ±3m 이내 97% fileciteturn0file0L496-L507
🖼️ Fig13~14(논문 p12): 실제 비행 궤적(실선)과 desired path(점선) 비교.
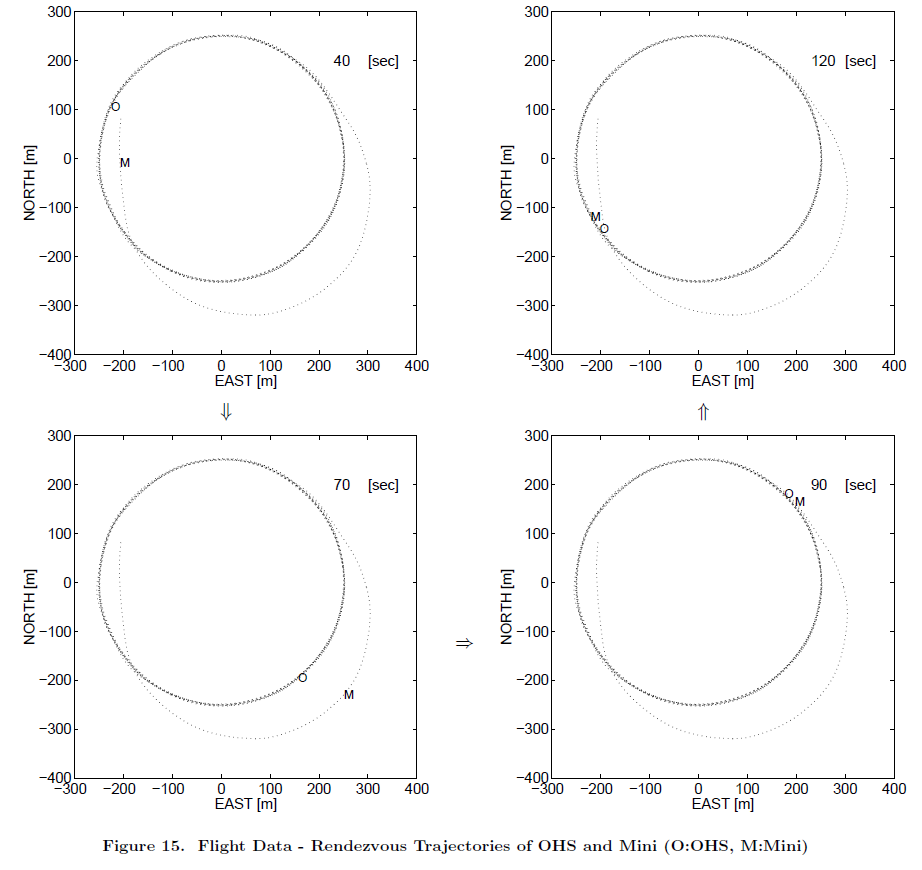
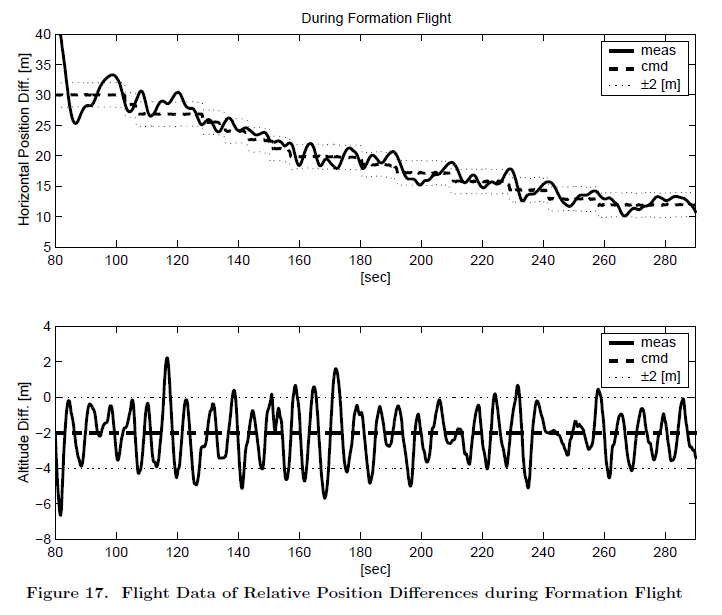
11.3 Rendezvous / Formation flight
- Parent는 Mini 위치를 몰라도 원 궤적 유지
- Mini는 Parent의 위치 정보를 받아 경로를 스케줄링하고 진입 → 같은 원 궤적을 추종하며 거리 유지 fileciteturn0file0L508-L535
- separation command를 30m → 12m로 단계적으로 줄였고,
- 수평 상대오차 ±2m 이내 86%
- 고도 상대오차 ±2m 이내 84% fileciteturn0file0L548-L566
12) 결론(논문 요지 정리)
논문이 꼽는 “왜 더 잘 되나”의 핵심은 2가지다. fileciteturn0file0L567-L581
1) 각도 (\eta)가 동시에 3가지 역할
- heading correction
- 작은 오차에서는 PD 제어
- 곡선에서는 원형 reference를 정확히 따르는 anticipatory 성분 fileciteturn0file0L567-L576
2) 순간 속도 (V)를 직접 사용
- 풍속 등 외란으로 inertial speed가 바뀌어도 자동 적응 fileciteturn0file0L576-L581
13) 부록: Lyapunov 안정성(직선 추종)
논문 부록은 직선 추종 모델에 대해 Lyapunov function을 구성해
특정 조건에서 asymptotically stable임을 보인다. fileciteturn0file0L582-L641
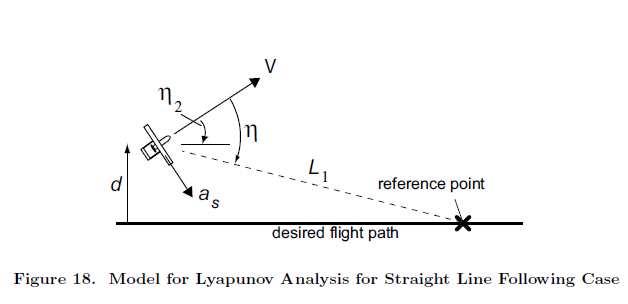
13.1 모델
guidance:
조건:
fileciteturn0file0L603-L611
13.2 결과(요지)
Lyapunov function을 통해
이고, invariant set theorem으로 ((\eta_2=0,d=0))만 남으므로
asymptotically stable. fileciteturn0file0L632-L641
14) 실전 적용 체크리스트 (내가 구현할 때의 포인트)
14.1 구현에 필요한 것
- 현재 위치/속도(벡터)
- path representation(폴리라인/스플라인 등)
- 경로를 따라 앞으로 (L_1)만큼 진행한 reference point 계산
- 각도 (\eta) 계산 (속도 벡터 vs (ref - pos) 벡터)
- 횡가속도 명령 (a_{s,cmd}) 생성 후, 내 시스템 액추에이터로 변환
- UAV: bank angle command
- UGV/차량: yaw rate/steering/curvature 명령 등
14.2 L1 튜닝 감각(중요)
- (L_1) ↓ : 더 공격적(고주파 경로 추종↑) 하지만 노이즈/액추에이터 한계에 취약
- (L_1) ↑ : 더 부드러움(안정·노이즈 강함) 하지만 곡선 세밀 추종↓
논문 관점에서는 inner loop 대역폭과 센서 지연을 고려해 (L_1)를 고르며,
실제 실험에서는 (V\approx25m/s), GPS delay 0.4s 등의 제약 아래 (L_1=150m)를 택했다. fileciteturn0file0L463-L470
15) 참고(원문)
Sanghyuk Park, John Deyst, Jonathan P. How,
A New Nonlinear Guidance Logic for Trajectory Tracking, AIAA. fileciteturn0file0L1-L22
think about it step-by-step