
개요
🔒 오일러 각의 한계로 인해 발생하는 짐벌 락 (Gimbal Lock)에 대해서 알아 보자.
이전, c++로 액터의 회전을 구현하는 중에 roll이 -90° ~ 90°를 기준으로 더 이상 회전하지 못하는 문제가 있었습니다.
이는 오일러 각도를 사용할 때 발생하는 짐벌 락 (Gimbal Lock)이 원인입니다.
짐벌 락 (Gimbal Lock)과 해결 방법에 대해서 알아 보겠습니다.
본론
📐 오일러 각 (Euler Angle)
짐벌 락에 대해서 이야기를 시작하기 전에 우선 오일러 각 (Euler Angle)에 대해서 먼저 알아야 합니다.
그 유명한 오일러 맞습니다.

강체가 놓인 방향을 3차원 공간에 표시하기 위해 레온하르트 오일러가 도입한 세 개의 각도이다.[1] 즉, 3차원 회전군 SO(3)의 한 좌표계다. 3차원 공간에 놓인 강체의 방향은 오일러 각도를 사용하여 세 번의 회전을 통해 얻을 수 있다.
오일러 각(Euler Angle)이란 "강체가 놓은 방향을 3차원 공간에 표시하기 위해 도입한 3개의 각도" 입니다.
하나씩 정리하겠습니다.👍
강체는 물리학에서 형태가 고정되어 변하지 않는 물체를 뜻합니다. Static Mesh로 대입하여 생각하시면 될 것 같습니다.
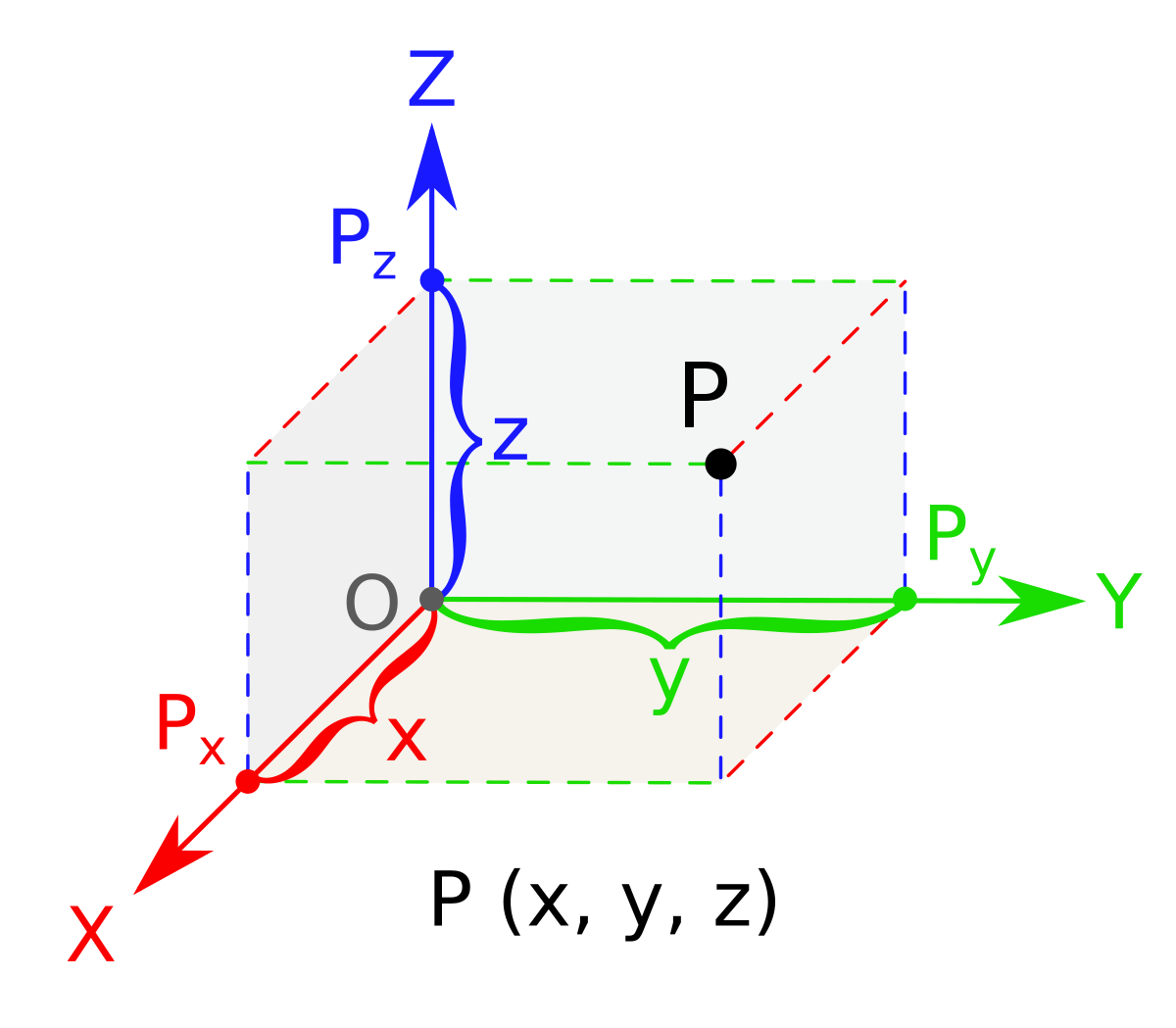
3차원 공간은 우리가 살고 있는 세계로 즉, X,Y,Z 3개의 축으로 나타낼 수 있습니다. 3D 모델링을 할 수 있는 환경도 포함할 수 있겠죠.
🔒 짐벌 락 (Gimbal Lock)
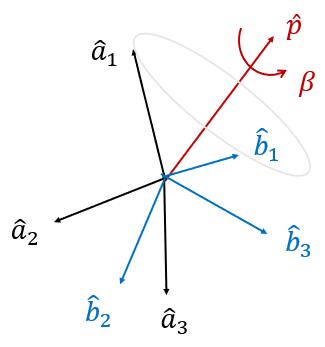
이때 언리얼 엔진에서의 강체의 회전 축은 아래 사진과 같이 나타낼 수 있습니다.
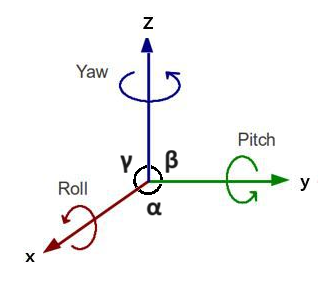
α에 대한 회전은 Z축을 중심으로 Yaw 회전이,
γ에 대한 회전은 Y축을 중심으로 Pitch 회전이,
β에 대한 회전은 X축을 중심으로 Roll 회전이 연산됩니다.
α와 γ의 경우 이상적인 상황에서 2π 라디안(360°)까지이며
β의 경우 -π/2 ~ π/2(-90° ~ 90°)까지가 된다.
여기서 β 범위가 제한적인 것을 짐벌 락 (Gimbal Lock)이라 합니다.
이유
회전을 계산할 때 정해진 Z->Y->X 순서대로 연산을 진행합니다.
이때는 앞서 회전한 두 축의 영향으로 세 번째 회전축이 다른 축과 정렬되며 하나의 축처럼 되어버리는 것입니다.
예시를 사진을 보며 설명하겠습니다.
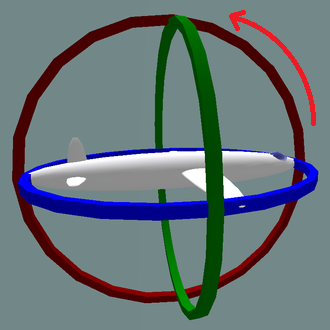
아래와 같이 비행기가 서 있다고 하겠습니다.
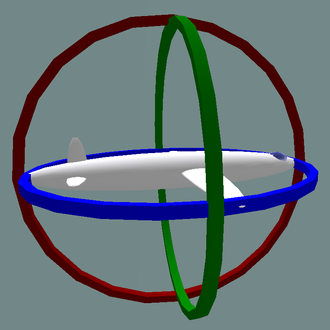
이때 Pitch을 90°만큼 회전해보겠습니다.
그럼 아래 사진처럼 비행기가 일어나게 됩니다.
여기서 X,Z축이 정렬되어 Yaw, Roll 회전이 동일한 결과값을 가져오게 됩니다.
더 이상 Roll 회전을 할 수 없게 되는 것입니다.
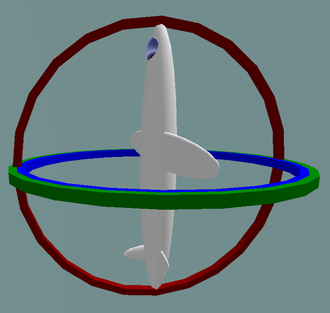
3개의 축이 의존적이라는 뜻이죠.
쿼터니언(Quaternion)
이러한 문제를 해결하기 위해서 쿼터니언(Quaternion)이 도입되었습니다. 4원수라고도 불립니다.
간단하게 1개의 축을 추가로 꽂아 버린 것입니다.
3차원 그래픽에서 회전을 표현할 때, 행렬 대신 사용하는 수학적 개념으로 4개의 값으로 이루어진 복소수 체계입니다.
짐벌 락 (Gimbal Lock)을 해결하기 위한 이유 외에도 다른 장점도 있습니다.
- 행렬에 비해 연산 속도가 빠릅니다.
- 차지하는 메모리 또한 적습니다.
- 오류가 날 확률이 적습니다.
마무리
사실 일반적으로 짐벌 락(Gimbal Lock)이 발생하기는 생각보다 어렵다고 합니다.
그리고 무엇보다 오일러 각을 사용한 회전이 사용하기 무척 편합니다...
여기까지 짐벌 락 (Gimbal Lock)에 대해서 알아 보았습니다.
