- OpenCV에서 광류를 사용하는 방법
- 고밀도 광학 흐름을 사용
The Lucas-Kanade Optical Flow Algorithm
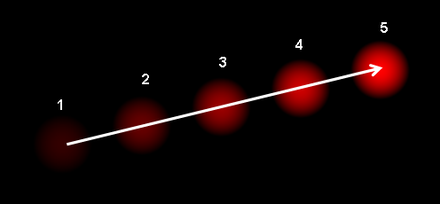
연속된 5개의 프레임으로 움직이는 공을 보여주는데,
화살표는 그것의 변위 벡터를 보여준다.
변위 벡터를 보여준다는 뜻은 객체의 움직임을 시각화 한다는 뜻이다.
이번시간에 배우는것은 빛을 이용해서 객체의 움직임을 시각화 하는것으로 보면된다.
- OpenCV에서 광류를 사용하는 방법
Lucas-Kanade 광학 흐름 (Optical Flow)을 사용하여 동영상에서 사람들이 걷는 경로를 추적하고 시각화하는 예제

# Load video stream, short clip
#cap = cv2.VideoCapture('walking_short_clip.mp4')
# Load video stream, long clip
cap = cv2.VideoCapture('walking.avi')
# Get the height and width of the frame (required to be an interger)
width = int(cap.get(3))
height = int(cap.get(4))
# Define the codec and create VideoWriter object. The output is stored in '*.avi' file.
out = cv2.VideoWriter('optical_flow_walking.avi', cv2.VideoWriter_fourcc('M','J','P','G'), 30, (width, height))
# Set parameters for ShiTomasi corner detection
feature_params = dict( maxCorners = 100,
qualityLevel = 0.3,
minDistance = 7,
blockSize = 7 )
# Set parameters for lucas kanade optical flow
lucas_kanade_params = dict( winSize = (15,15),
maxLevel = 2,
criteria = (cv2.TERM_CRITERIA_EPS | cv2.TERM_CRITERIA_COUNT, 10, 0.03))
# Create some random colors
# Used to create our trails for object movement in the image
color = np.random.randint(0,255,(100,3))
# Take first frame and find corners in it
ret, prev_frame = cap.read()
prev_gray = cv2.cvtColor(prev_frame, cv2.COLOR_BGR2GRAY)
# Find inital corner locations
prev_corners = cv2.goodFeaturesToTrack(prev_gray, mask = None, **feature_params)
# Create a mask image for drawing purposes
mask = np.zeros_like(prev_frame)
while(1):
ret, frame = cap.read()
if ret == True:
frame_gray = cv2.cvtColor(frame, cv2.COLOR_BGR2GRAY)
# calculate optical flow
new_corners, status, errors = cv2.calcOpticalFlowPyrLK(prev_gray,
frame_gray,
prev_corners,
None,
**lucas_kanade_params)
# Select and store good points
good_new = new_corners[status==1]
good_old = prev_corners[status==1]
# Draw the points
for new in good_new:
a, b = new.ravel()
frame = cv2.circle(frame, (int(a), int(b)), 5, (0, 255, 0), -1)
img = cv2.add(frame,mask)
# Save Video
out.write(img)
# Show Optical Flow
#imshow('Optical Flow - Lucas-Kanade',img)
# Now update the previous frame and previous points
prev_gray = frame_gray.copy()
prev_corners = good_new.reshape(-1,1,2)
else:
break
cap.release()
out.release()A. 광학 흐름 계산
new_corners, status, errors = cv2.calcOpticalFlowPyrLK(prev_gray,
frame_gray,
prev_corners,
None,
**lucas_kanade_params)
B. 이동 경로 시각화
for i,(new,old) in enumerate(zip(good_new, good_old)):
a, b = new.ravel()
c, d = old.ravel()
mask = cv2.line(mask, ( int(a),int(b) ),( int(c),int(d) ), color[i].tolist(), 2)
frame = cv2.circle(frame, ( int(a),int(b) ), 5, color[i].tolist(),-1)
C. 프레임에 그리기
img = cv2.add(frame,mask)Dense Optical Flow - 고밀도 광학 유량
배경을 검게 만들고 트랙킹을 한다음 추척하고 싶은 개체만 보이게 한다.

위의 Lucas-Kanade 와 다른점은 아래 두가지 이다.
A. 밀도 있는 광학 흐름 계산
flow = cv2.calcOpticalFlowFarneback(previous_gray, next,
None, 0.5, 3, 15, 3, 5, 1.2, 0)
B. 속도와 각도에 따른 색상 계산
magnitude, angle = cv2.cartToPolar(flow[...,0], flow[...,1])
hsv[...,0] = angle * (180 / (np.pi/2))
hsv[...,2] = cv2.normalize(magnitude, None, 0, 255, cv2.NORM_MINMAX)
final = cv2.cvtColor(hsv, cv2.COLOR_HSV2BGR)
# Load video stream, short clip
#cap = cv2.VideoCapture('walking_short_clip.mp4')
# Load video stream, long clip
cap = cv2.VideoCapture('walking.avi')
# Get the height and width of the frame (required to be an interger)
width = int(cap.get(3))
height = int(cap.get(4))
# Define the codec and create VideoWriter object. The output is stored in '*.avi' file.
out = cv2.VideoWriter('dense_optical_flow_walking.avi', cv2.VideoWriter_fourcc('M','J','P','G'), 30, (width, height))
# Get first frame
ret, first_frame = cap.read()
previous_gray = cv2.cvtColor(first_frame, cv2.COLOR_BGR2GRAY)
hsv = np.zeros_like(first_frame)
hsv[...,1] = 255
while True:
# Read of video file
ret, frame2 = cap.read()
if ret == True:
next = cv2.cvtColor(frame2,cv2.COLOR_BGR2GRAY)
# Computes the dense optical flow using the Gunnar Farneback’s algorithm
flow = cv2.calcOpticalFlowFarneback(previous_gray, next,
None, 0.5, 3, 15, 3, 5, 1.2, 0)
# use flow to calculate the magnitude (speed) and angle of motion
# use these values to calculate the color to reflect speed and angle
magnitude, angle = cv2.cartToPolar(flow[...,0], flow[...,1])
hsv[...,0] = angle * (180 / (np.pi/2))
hsv[...,2] = cv2.normalize(magnitude, None, 0, 255, cv2.NORM_MINMAX)
final = cv2.cvtColor(hsv, cv2.COLOR_HSV2BGR)
# Save Video
out.write(final)
# Show our demo of Dense Optical Flow
#imshow('Dense Optical Flow', final)
# Store current image as previous image
previous_gray = next
else:
break
cap.release()
out.release()
감사합니다. https://www.youtube.com/channel/UCxlkiu9_aWijoD7BannNM7w