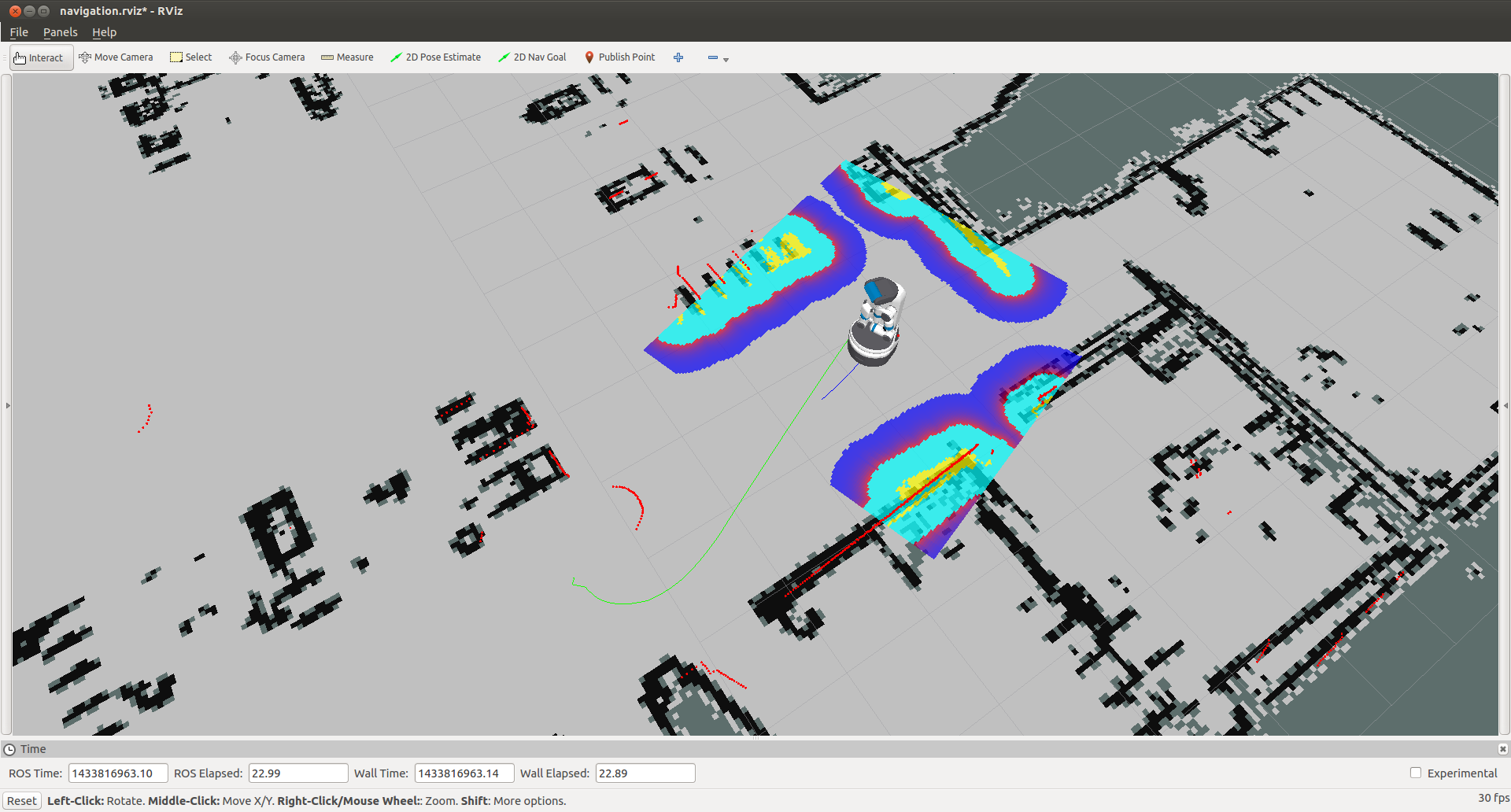
RViz는 ROS Visualization의 약자로
여러 플러그인을 제공해 ROS의 메시지를 시각화한다.
예를 들어 로봇이 이동하고 내비게이션을 할 수 있는 건물 지도를 시각화 할 수 있다.
parameter server
파라미터 서버는 ROS 애플리케이션의 노드들 간 대체 통신 프로토콜을 제공한다.
그림 설명
+---------------------+
| ROS Master |
| +---------------+ |
| | Parameter | |
| | Server | |
| +---------------+ |
+---------------------+
| |
| |
+----+ +----+
| |
+---v---+ +---v---+
| Node1 | | Node2 |
+-------+ +-------+
그림 설명 + RViz
위에 설명한 RViz는 Node와 같은 선상에 있어 그림으로 나타내면 아래와 같다.
+---------------------+
| ROS Master |
| +---------------+ |
| | Parameter | |
| | Server | |
| +---------------+ |
+---------------------+
| |
| |
+----+ +----+
| |
+---v---+ +---v---+ +-------+
| Node1 | | Node2 | | RViz |
+-------+ +-------+ +-------+
| | ^
| | |
+-----------+-----------+RViz도 하나의 ROS 노드로 작동하며,
RViz는 ROS Master 및 Parameter Server와 연결돼있고, RViz가 ROS Master를 통해 시스템에 등록되고, Parameter Server에서 설정을 읽거나 쓸 수 있음을 의미한다.
RViz와 다른 노드들 사이의 선은 RViz가 다른 노드들과 통신할 수 있음을 나타내며 이들은 서로 토픽을 통해 이루어진다.
이 구조에서 RViz의 역할
- RViz는 다른 노드들이 발행하는 데이터를 구독하여 시각화
- Parameter Server에서 설정을 읽어와 시각화 구성에 사용
- 사용자가 RViz에서 변경한 설정을 Parameter Server에 저장
- ROS Master를 통해 시스템의 다른 부분과 통신하고 필요한 토픽을 찾음
Node 예시
-
설명: ROS의 기본 연산 단위, 특정 작업을 수행하는 실행 가능한 프로그램
-
역할: 센서 데이터 처리, 모터 제어, 알고리즘 실행 등
-
실제 사용:
센서 드라이버 노드: 카메라, 라이다, IMU 등의 센서 데이터 발행
모터 제어 노드: 로봇의 모터를 제어하여 움직임 생성
SLAM 노드: 동시적 위치추정 및 지도 작성 알고리즘 실행
내비게이션 노드: 경로 계획 및 장애물 회피 알고리즘 실행
이미지 처리 노드: 컴퓨터 비전 알고리즘을 사용한 이미지 분석
parameter server 추가 설명
- 설명: 키-값 쌍으로 구성된 공유 딕셔너리로, 노드 간에 설정을 공유
- 역할: 전역 설정 저장, 노드 간 설정 공유
- 실제 사용:
로봇의 물리적 특성 저장 (무게, 크기 등)
센서 설정 저장 (카메라 해상도, 레이저 스캐너 범위 등)
알고리즘 파라미터 저장 (PID 제어기 게인, 경로 계획 파라미터 등)
ROS Master
- 설명: ROS 시스템의 중추로, 노드 간 통신을 관리하고 조정합니다.
- 역할: 노드 등록, 노드 간 연결 설정, 파라미터 서버 호스팅
- 실제 사용: 모든 ROS 시스템에서 기본적으로 사용됩니다. 'roscore' 명령어로 실행
감사합니다. https://www.youtube.com/channel/UCxlkiu9_aWijoD7BannNM7w