워크스페이스까지 만들었는데, 시뮬레이션을 동작하기 위해서는
Model > Visualize > Simulate > 문제점 찾기 > 수정 의 순서로 진행할 예정이다.
Model
URDF
Model 단계에 해당하는 URDF로 XML 태그를 사용하여 로봇의 구조와 구성 요소를 표현한다.
HTML과 유사한구조
URDF 구성
주요 URDF 태그
- 전체 로봇 구조를 정의하는 최상위 태그
- : 로봇의 개별 구성 요소를 표현 visual, collision, inertial 등의 하위 태그로 속성 정의
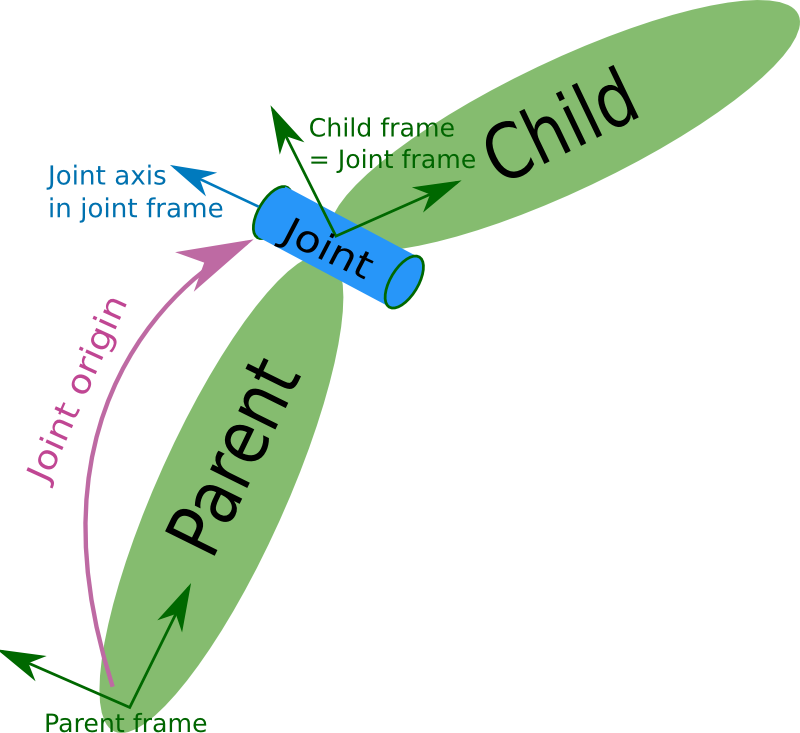
- : 두 링크를 연결하고 그 속성을 정의
부모-자식 관계로 트리 구조 형성
연결 유형(고정, 회전, 이동 등) 지정
회전축, 이동 제한 등 추가 속성 정의 가능
구조
<robot>
<link>
...
</link>
<joint>
...
</joint>
</robot>총 6개의 부품을 연결

1. base_link
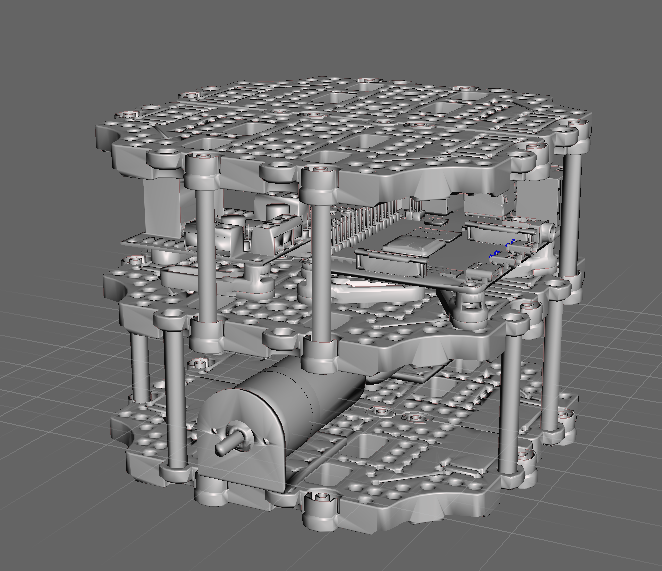
2. imu_link ( 자이로센서)

3. 바퀴 두짝
4. caster-rear, front
실제 코드
<?xml version="1.0"?>
<!--
<?xml version="1.0"?>
<!--
로봇 구조 요약:
1. base_footprint: 로봇의 기준점
2. base_link: 로봇의 주 본체
3. wheel_right_link: 오른쪽 바퀴
4. wheel_left_link: 왼쪽 바퀴
5. caster_front_link: 전방 캐스터 휠
6. caster_rear_link: 후방 캐스터 휠
조인트 구조:
- base_joint: base_footprint와 base_link 연결 (고정)
- wheel_right_joint: base_link와 오른쪽 바퀴 연결 (연속 회전)
- wheel_left_joint: base_link와 왼쪽 바퀴 연결 (연속 회전)
- caster_front_joint: base_link와 전방 캐스터 연결 (고정)
- caster_rear_joint: base_link와 후방 캐스터 연결 (고정)
이 로봇은 두 개의 구동 바퀴와 두 개의 캐스터 휠을 가진 이동 로봇입니다.
STL 파일을 사용하여 각 부품의 3D 모델을 정의하고 있습니다.
-->
<!-- 로봇 정의 시작 -->
<robot name="bumperbot">
<!-- 베이스 발자국 링크 정의 -->
<link name="base_footprint">
</link>
<!-- 베이스 링크 정의 -->
<link name="base_link">
<visual>
<origin rpy="0 0 0" xyz="0 0 0"/>
<geometry>
<!-- 베이스 링크의 3D 모델 파일 지정 -->
<mesh filename="package://bumperbot_description/meshes/base_link.STL"/>
</geometry>
</visual>
</link>
<!-- 베이스 발자국과 베이스 링크를 연결하는 고정 조인트 -->
<joint name="base_joint" type="fixed">
<parent link="base_footprint"/>
<child link="base_link"/>
<origin rpy="0 0 0" xyz="0 0 0.033"/>
</joint>
<!-- 오른쪽 바퀴 링크 정의 -->
<link name="wheel_right_link">
<visual>
<origin rpy="1.57 0 0" xyz="0 0 0"/>
<geometry>
<!-- 오른쪽 바퀴의 3D 모델 파일 지정 -->
<mesh filename="package://bumperbot_description/meshes/wheel_right_link.STL"/>
</geometry>
</visual>
</link>
<!-- 오른쪽 바퀴 조인트 정의 (연속 회전) -->
<joint name="wheel_right_joint" type="continuous">
<origin rpy="0 0 0" xyz="0 -0.07 0"/>
<parent link="base_link"/>
<child link="wheel_right_link"/>
<axis xyz="0 1 0"/>
</joint>
<!-- 왼쪽 바퀴 링크 정의 -->
<link name="wheel_left_link">
<visual>
<origin rpy="-1.57 0 0" xyz="0 0 0"/>
<geometry>
<!-- 왼쪽 바퀴의 3D 모델 파일 지정 -->
<mesh filename="package://bumperbot_description/meshes/wheel_left_link.STL"/>
</geometry>
</visual>
</link>
<!-- 왼쪽 바퀴 조인트 정의 (연속 회전) -->
<joint name="wheel_left_joint" type="continuous">
<origin rpy="0 0 0" xyz="0 0.07 0"/>
<parent link="base_link"/>
<child link="wheel_left_link"/>
<axis xyz="0 1 0"/>
</joint>
<!-- 전방 캐스터 링크 정의 -->
<link name="caster_front_link">
<visual>
<origin rpy="0 0 0" xyz="0 0 0"/>
<geometry>
<!-- 전방 캐스터의 3D 모델 파일 지정 -->
<mesh filename="package://bumperbot_description/meshes/caster_front_link.STL"/>
</geometry>
</visual>
</link>
<!-- 전방 캐스터 조인트 정의 (고정) -->
<joint name="caster_front_joint" type="fixed">
<origin rpy="0 0 0" xyz="0.0475 0 -0.0275"/>
<parent link="base_link"/>
<child link="caster_front_link"/>
</joint>
<!-- 후방 캐스터 링크 정의 -->
<link name="caster_rear_link">
<visual>
<origin rpy="0 0 0" xyz="0 0 0"/>
<geometry>
<!-- 후방 캐스터의 3D 모델 파일 지정 -->
<mesh filename="package://bumperbot_description/meshes/caster_rear_link.STL"/>
</geometry>
</visual>
</link>
<!-- 후방 캐스터 조인트 정의 (고정) -->
<joint name="caster_rear_joint" type="fixed">
<origin rpy="0 0 0" xyz="-0.0475 0 -0.0275"/>
<parent link="base_link"/>
<child link="caster_rear_link"/>
</joint>
</robot>
<!-- 로봇 정의 끝 -->
STL 파일
https://drive.google.com/drive/folders/11_n552jfseJHNUhTUXIdhJ0XULIWUrl6?usp=sharing
감사합니다. https://www.youtube.com/channel/UCxlkiu9_aWijoD7BannNM7w