ROS2
1.Raspberry Pi 4 -ubuntu 22.04.4 LTS OS 설치
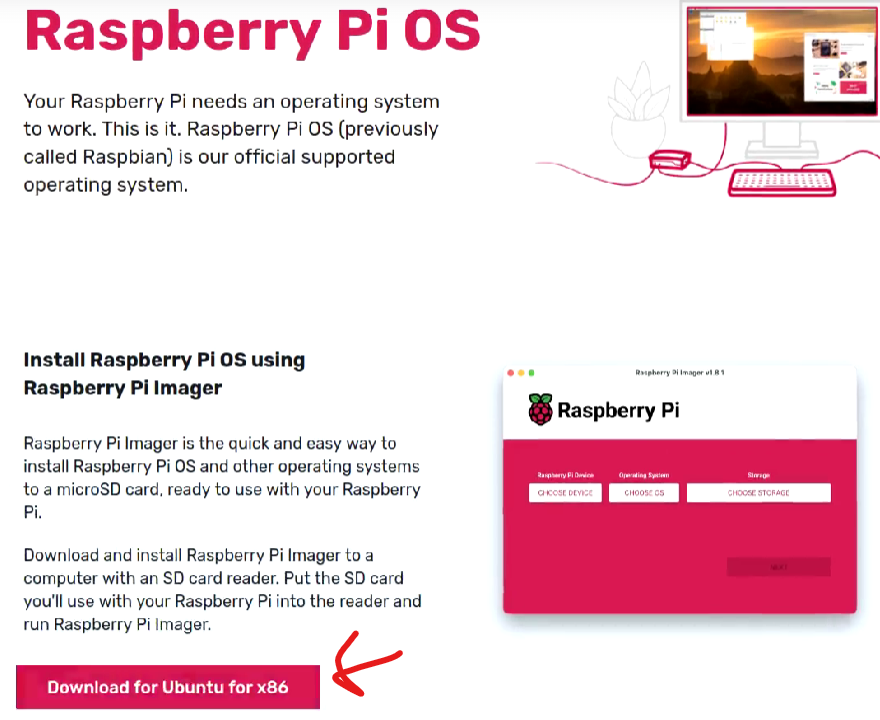
Raspberry Pi 4 에 turtlebot 제어를 위해 OS를 설치하는 내용이다.1\. raspberry pi OS 설치1번은 OS 를 설정해주는데other general-purpose OS를 선택하여 Ubuntu 용으로 설치한다.22.04.4 LTS 이므로 맞게
2024년 8월 26일
2.ROS2 - Turtlebot project 1
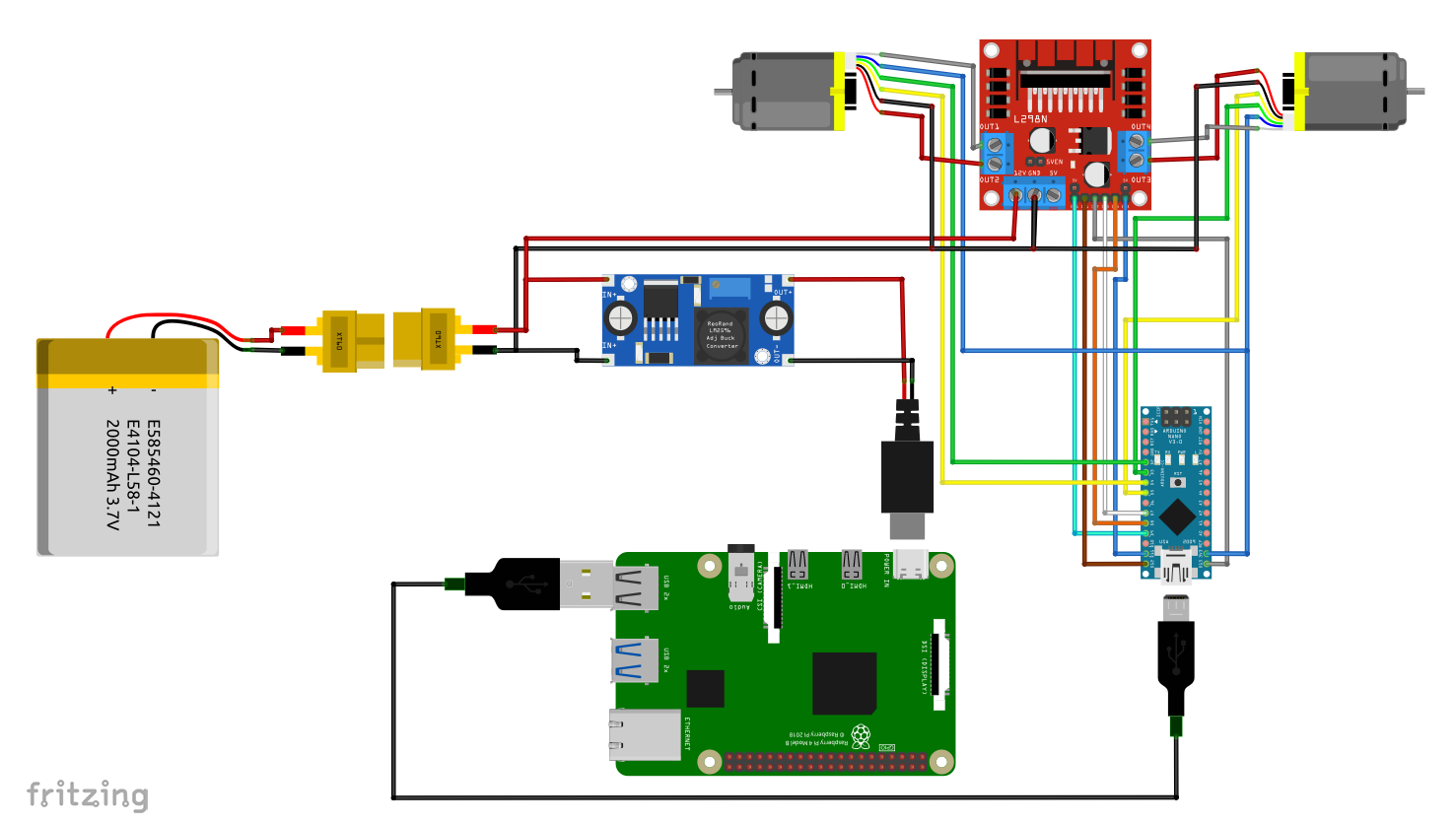
저번에 raspberry pi에 대한 내용을 올렸었는데 이번에는 전체적인 프로젝트의 회로를 한번 확인한다.여태 했던 ROS 프로젝트와 달리 라즈베리파이가 추가가 됐는데 라즈베리파이로 원격으로 제어하기 위해 기존의 ROS가 설치된 컴퓨터를 대체하는 내용이다.BOM lis
2024년 8월 28일
3.Linux ttyUSB0 고정

ROS2 run을 할 때 마다 arduino nano를 하드웨어적으로 해제했다가 연결해줘야 하는데(포트가 한번 설정되면 launch 가 끝나도 사용되는것으로 인식)재 연결시 /dev/ttyUSB1로 바뀌는 경우가 있다.그래서 nano의 USB 정보가 들어오면 해당 정보
2024년 11월 5일