0. 플러그인
- 사진의 2개의 플러그인이 있어야 함 (언리얼 엔진 5.7버젼에는 기본적으로 들어있었음)

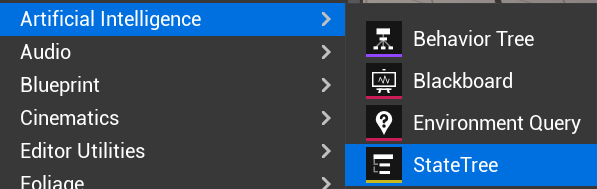
1. State Tree
-
이전엔 Behavior Tree로 AI 행동로직을 구현하였지만, 트리 구조라 로직이 복잡해지면 엄청 구조가 깊어지게 되고, 디버깅도 어렵고 성능도 좋지 않음
-
State Tree는 FSM과 Task 기능을 합쳐 성능 좋음
1.1. Schema
- 종류는 아래 사진처럼 3개가 존재
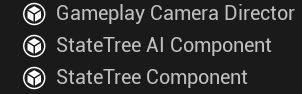
StateTree Component
-
액터 자체에 붙어서 동작
-
AI 컨트롤러 없이 State Tree에 의해서 액터가 동작함
-
독립적으로 움직이는 신호등, 자동문 같은 액터에 사용
StateTree AI Component
-
AI 컨트롤러가 필요한 State Tree
-
AI Character에 사용됨
Gameplay Camera Director
- 카메라 연출과 관련된 로직 관련
커스텀 스키마
- 원하면 C++로 자신만의 스키마도 구현하여 사용 가능
1.2. State Tree Asset Detail
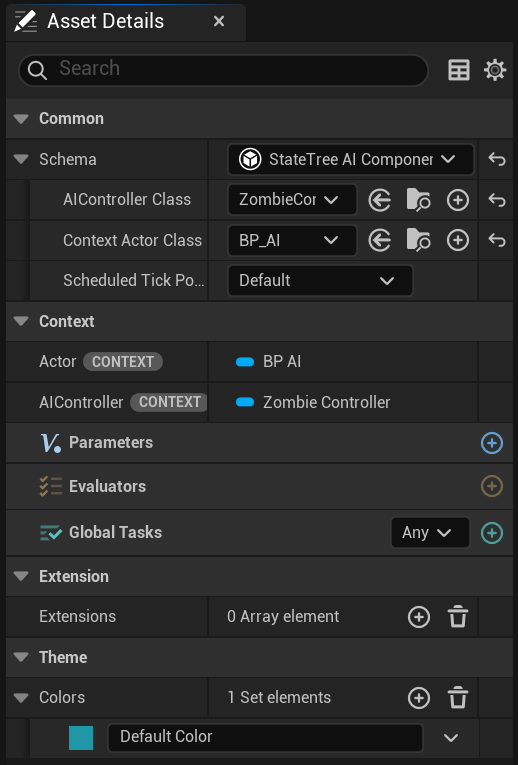
-
AIController Class / Context Actor Class : 해당 State Tree와 함께 사용될 컨트롤러와 캐릭터 설정
-
Context : 기본적으로 가지고 시작할 데이터 정보 (레퍼런스)
- Parameter : AI마다 다른 값 가지며 시작 가능한 전역 변수 (Health)
- Evaluators : 활성화 되었을 때, 주기적으로 상태나 환경 정보를 평가하는 컴포넌트
- Global Tasks : State 상관 없이 항상 실행되는 전역 Task
-
Theme : 보기 편하게 색으로 구분해줄 수 있는 기능 (정말 시각용)
1.3. State
-
현재 무엇을 해야하는지(상태)를 정의한 노드
-
각 State는 Task와 Transition을 가짐
-
Task 여러 개 가지면 동시에 실행됨
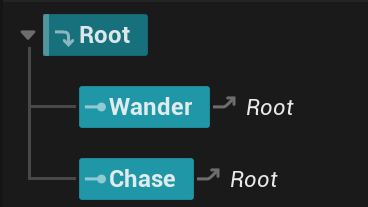
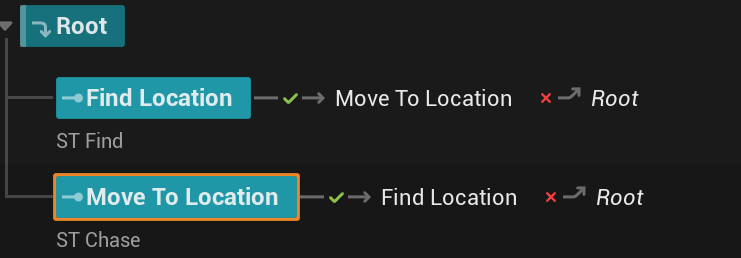
- Root State
- 최상단 노드로 여기서 State Tree가 시작됨
- 일은 안 하고 다음 State로 전환시키는 역할만 함
- 현재 상태는 Root로부터 지금 활성화된 Node까지의 모든 경로(브랜치)를 말함
Root
|-A
| |-a a가 활성화 되어 있으면, A와 a 둘 다 현재 상태로 활성화 된 것임
|
|-B-
Child
- 부모 노드 밑의 자식 노드. 자식 노드가 활성화되면 모든 부모 노드도 활성화되어 함께 동작함
- 그래서 공통 로직은 부모노드에 넣고, 세부 행동을 자식으로 쪼개서 분리
-
Sibling
- 형제 노드끼리는 경쟁 관계로, 부모 노드가 자식 노드 중 하나만 골라 활성화 시킴
- A와 B, 사진의 Wander와 Chase는 서로 형제 관계. Root에선 자식 노드
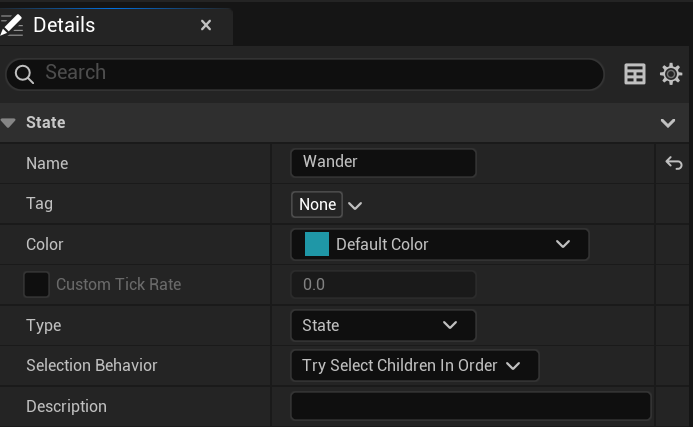
1.4. State Details
-
Name : 노드 이름
-
Tag : GAS의 태그를 노드에 붙일 수 있음. 자식 노드는 부모 노드의 Tag를 물려받음
-
Color : 보기 편하게 색깔 설정
-
Type
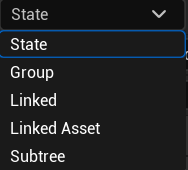
- State : 일반 State. 지금까지 설명한 일반적인 노드
- Group : Task 없이 자식 State를 묶어주는 컨테이너(폴더) 역할
- Subtree : 재사용할 로직 덩어리. 직접 실행되는게 아니라, 함수처럼 누가 호출하기를 기다리는 노드
- Linked : 이 SubTree를 부를 노드. SubTree 노드로 점프함
- Linked Asset : State Tree 파일 전체를 호출함
-
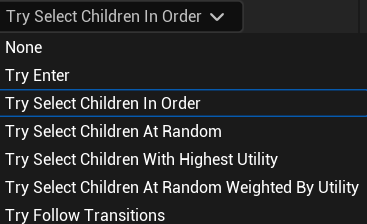
Selection Behavior : 부모가 어느 자식 선택할건지
| 옵션 이름 | 설명 |
|---|---|
| None (선택하지 않음) | 아무 동작도 설정되지 않음 |
| Try Enter | Parent 자신만 실행하고 자식 노드는 무시 |
| Try Select Children In Order | 위에서부터 순서대로 조건을 검사하여 실행 (기본값) |
| Try Select Children At Random | 조건을 통과한 Child 중 무작위로 하나를 선택 |
| Try Select Children With Highest Utility | Utility 점수가 가장 높은 Child를 선택 |
| Try Select Children At Random Weighted By Utility | Utility 점수 비율대로 가중 무작위 선택 |
| Try Follow Transitions | Child 선택 없이 Transition 조건을 먼저 검사 |
2. 이동 Task 생성
-
StateTreeTaskBlueprintBase를 부모로 하여 블루프린트 생성 -
생명주기 함수
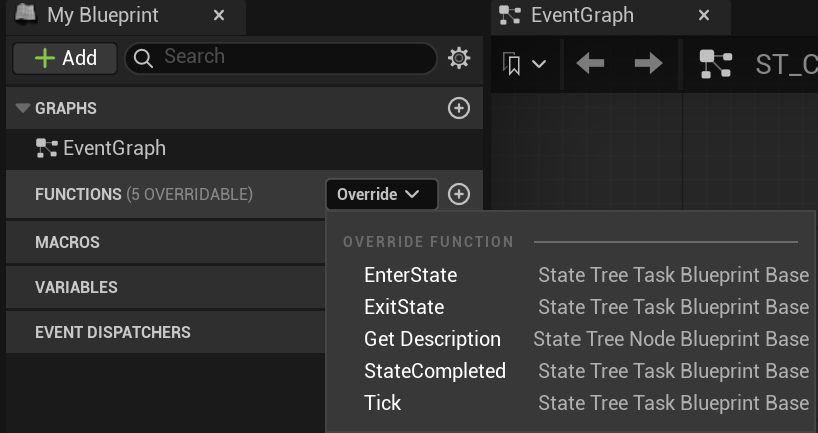
- EnterState : State 활성화되자마자 호출되는 함수
- Tick : 매 프레임마다 호출되는 함수
- StateCompleted : state task의 성공여부 결과값을 state로 넘겨주는 함수
- ExitState : State 떠나는 순간 무조건 호출되는 함수 (타이미 정리..)
- Get Description : 에디터/디버깅 용
-
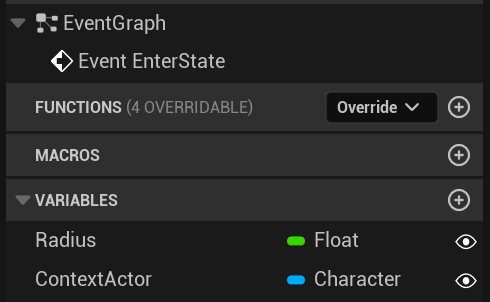
Variables
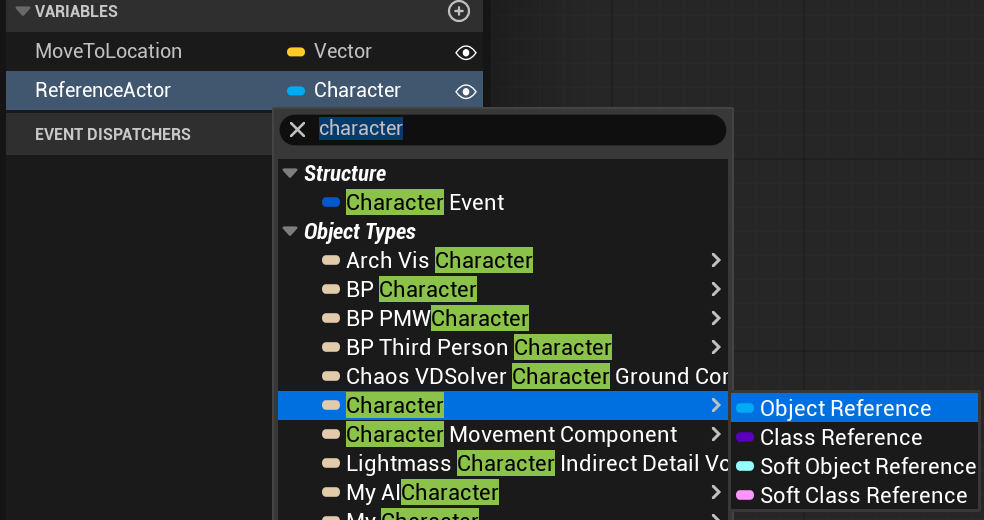
- 눈 표시 띄우면(Instance Editable), 해당 값을 State Tree에서 입력 Parameter로 노출
- 눈 지우면, 이 Task 내부적으로만 사용하고 노출 안 함
- 변수 Detail창에서 Category를 Input으로 입력하면, 이후 StateTree에서의 Task에서
IN이 표시되므로 설정해줌 - Output으로 입력하면, 입력 필드가 사라지고 출력 전용이 됨. 다른 Task의 Input으로 바인딩 가능
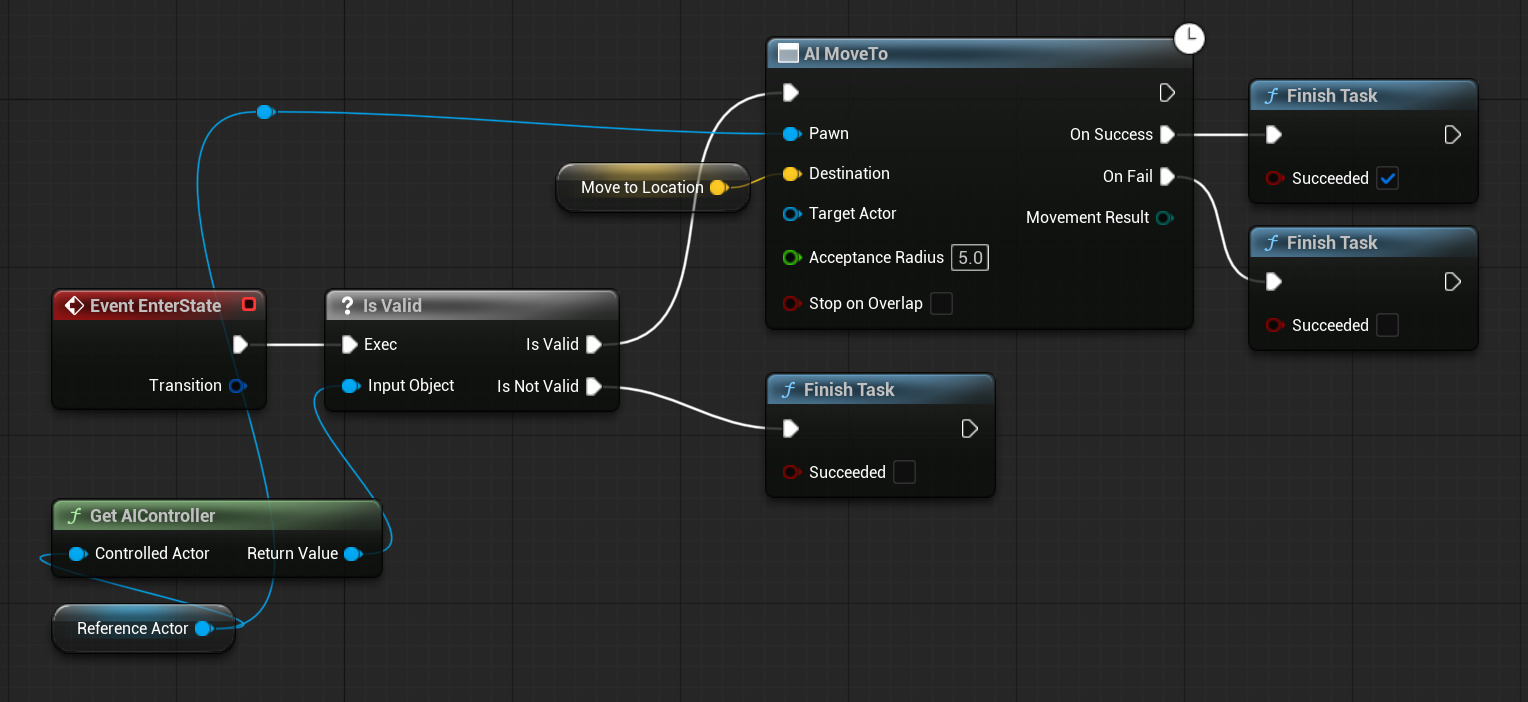
-
AI Move To로 이동하고,Finish Task로 task 종료 후 성공 여부 저장 -
Finish Task: 해당 Task가 들어있었던 State 자체를 종료시킴. 따라서 같은 State에 있던 다른 Task들도 다 종료됨
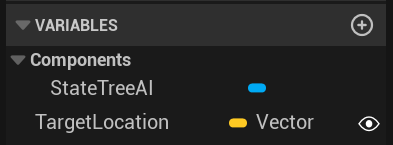
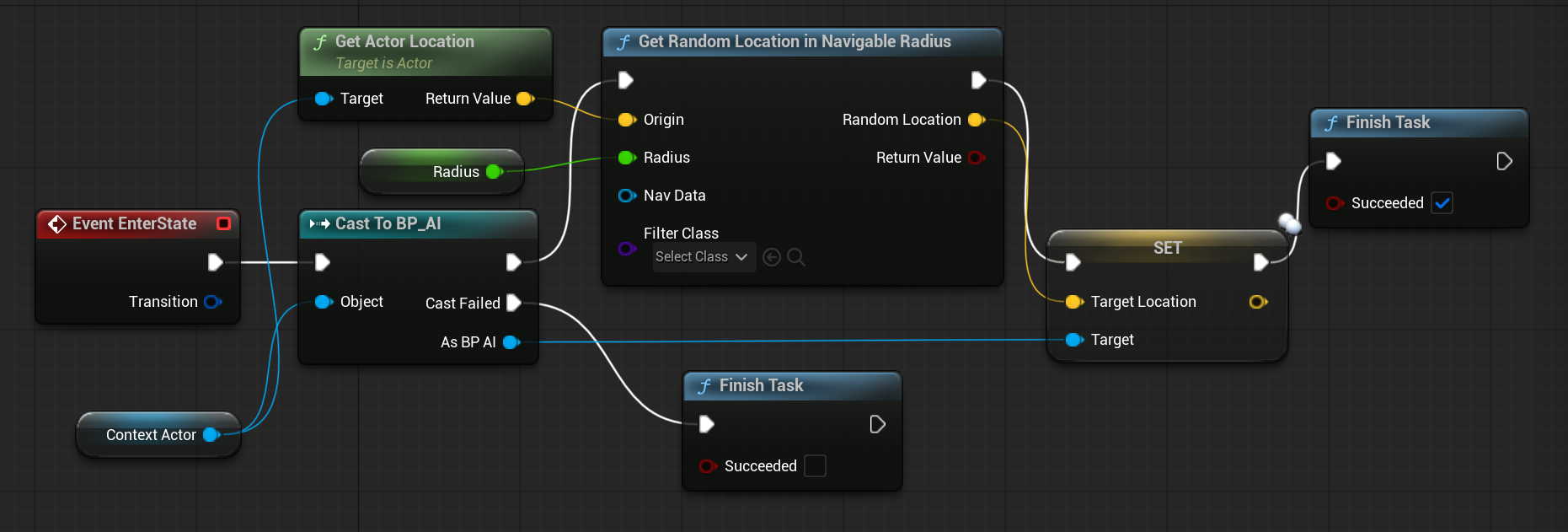
3. Find Target Location Task
-
이동할 위치 찾고 해당 위치를 변수에 저장해야함
-
하지만 Task는 동작을 수행하는 역할이라 Task 대신, 캐릭터 "블루프린트"에 저장
  |
|---|
4. State Tree에 연결
-
Radius 파라미터 생성

-
Task의 입력인자로 파라미터와 Context Actor 연결

- 캐릭터 블루프린트에 변수 선언해야 Task에 인자로 쉽게 넣을 수 있음
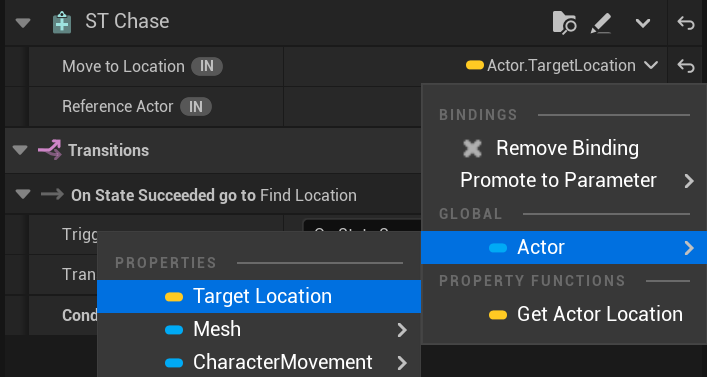
- State마다 Transition을 성공하면 이동하도록 설정